 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Image-Guided Robotic System for Transcranial Magnetic Stimulation: System Development and Experimental Evaluation
Oct 20, 2024



Transcranial magnetic stimulation (TMS) is a noninvasive medical procedure that can modulate brain activity, and it is widely used in neuroscience and neurology research. Compared to manual operators, robots may improve the outcome of TMS due to their superior accuracy and repeatability. However, there has not been a widely accepted standard protocol for performing robotic TMS using fine-segmented brain images, resulting in arbitrary planned angles with respect to the true boundaries of the modulated cortex. Given that the recent study in TMS simulation suggests a noticeable difference in outcomes when using different anatomical details, cortical shape should play a more significant role in deciding the optimal TMS coil pose. In this work, we introduce an image-guided robotic system for TMS that focuses on (1) establishing standardized planning methods and heuristics to define a reference (true zero) for the coil poses and (2) solving the issue that the manual coil placement requires expert hand-eye coordination which often leading to low repeatability of the experiments. To validate the design of our robotic system, a phantom study and a preliminary human subject study were performed. Our results show that the robotic method can half the positional error and improve the rotational accuracy by up to two orders of magnitude. The accuracy is proven to be repeatable because the standard deviation of multiple trials is lowered by an order of magnitude. The improved actuation accuracy successfully translates to the TMS application, with a higher and more stable induced voltage in magnetic field sensors.
Learning to Detect Collisions for Continuum Manipulators without a Prior Model
Aug 12, 2019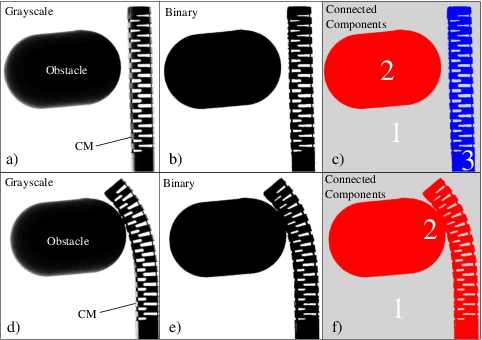
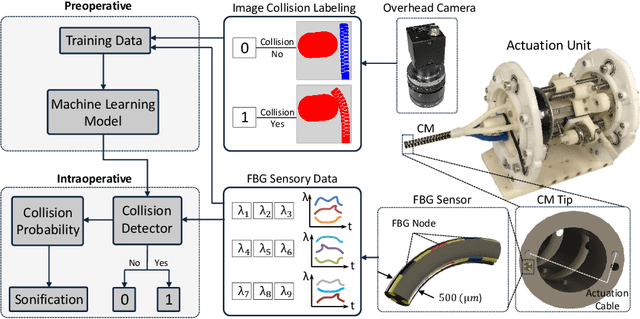
Due to their flexibility, dexterity, and compact size, Continuum Manipulators (CMs) can enhance minimally invasive interventions. In these procedures, the CM may be operated in proximity of sensitive organs; therefore, requiring accurate and appropriate feedback when colliding with their surroundings. Conventional CM collision detection algorithms rely on a combination of exact CM constrained kinematics model, geometrical assumptions such as constant curvature behavior, a priori knowledge of the environmental constraint geometry, and/or additional sensors to scan the environment or sense contacts. In this paper, we propose a data-driven machine learning approach using only the available sensory information, without requiring any prior geometrical assumptions, model of the CM or the surrounding environment. The proposed algorithm is implemented and evaluated on a non-constant curvature CM, equipped with Fiber Bragg Grating (FBG) optical sensors for shape sensing purposes. Results demonstrate successful detection of collisions in constrained environments with soft and hard obstacles with unknown stiffness and location.
FBG-Based Position Estimation of Highly Deformable Continuum Manipulators: Model-Dependent vs. Data-Driven Approaches
Dec 20, 2018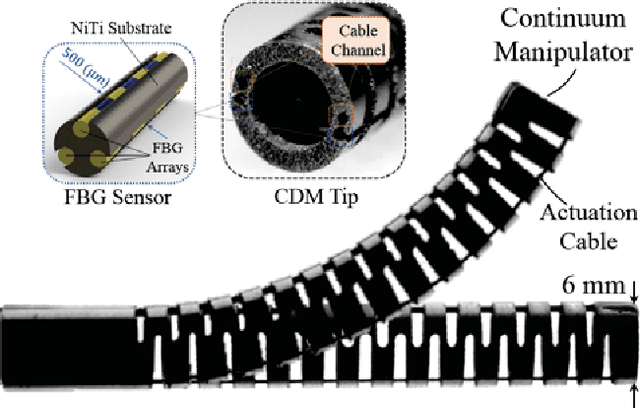
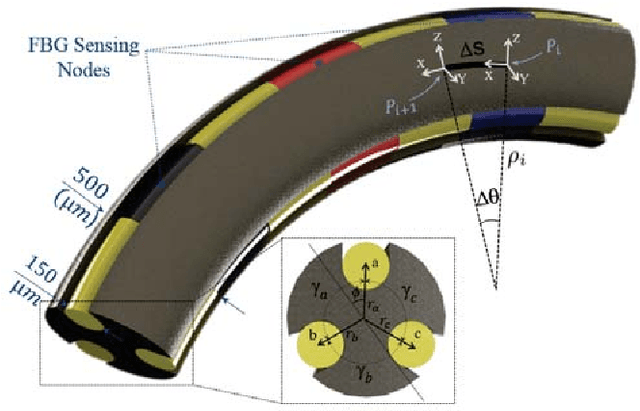
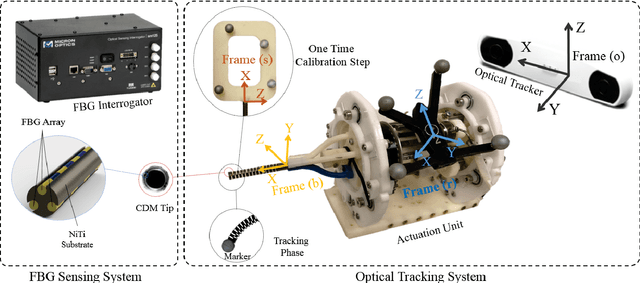
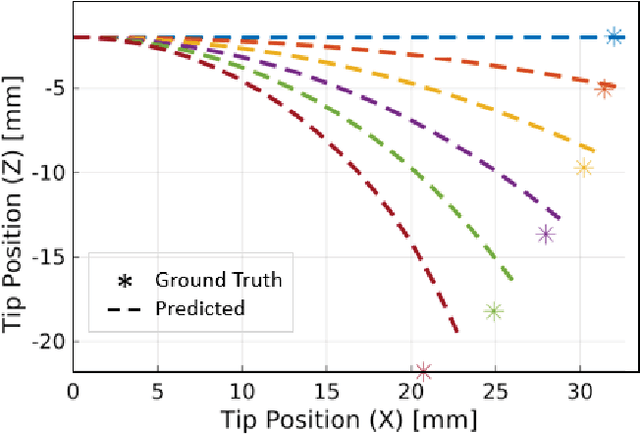
Conventional shape sensing techniques using Fiber Bragg Grating (FBG) involve finding the curvature at discrete FBG active areas and integrating curvature over the length of the continuum dexterous manipulator (CDM) for tip position estimation (TPE). However, due to limited number of sensing locations and many geometrical assumptions, these methods are prone to large error propagation especially when the CDM undergoes large deflections. In this paper, we study the complications of using the conventional TPE methods that are dependent on sensor model and propose a new data-driven method that overcomes these challenges. The proposed method consists of a regression model that takes FBG wavelength raw data as input and directly estimates the CDM's tip position. This model is pre-operatively (off-line) trained on position information from optical trackers/cameras (as the ground truth) and it intra-operatively (on-line) estimates CDM tip position using only the FBG wavelength data. The method's performance is evaluated on a CDM developed for orthopedic applications, and the results are compared to conventional model-dependent methods during large deflection bendings. Mean absolute TPE error (and standard deviation) of 1.52 (0.67) mm and 0.11 (0.1) mm with maximum absolute errors of 3.63 mm and 0.62 mm for the conventional and the proposed data-driven techniques were obtained, respectively. These results demonstrate a significant out-performance of the proposed data-driven approach versus the conventional estimation technique.
FBG-Based Control of a Continuum Manipulator Interacting With Obstacles
Jul 01, 2018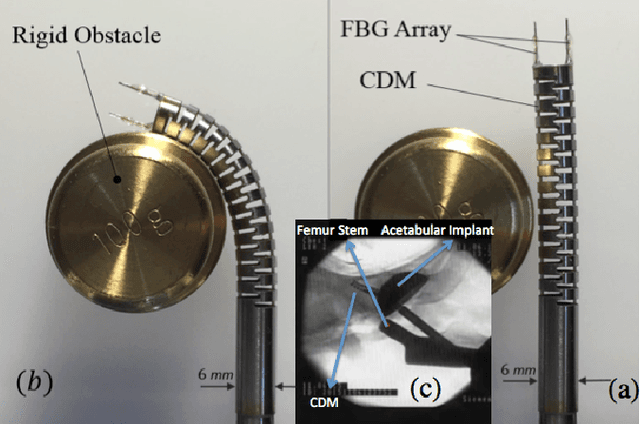
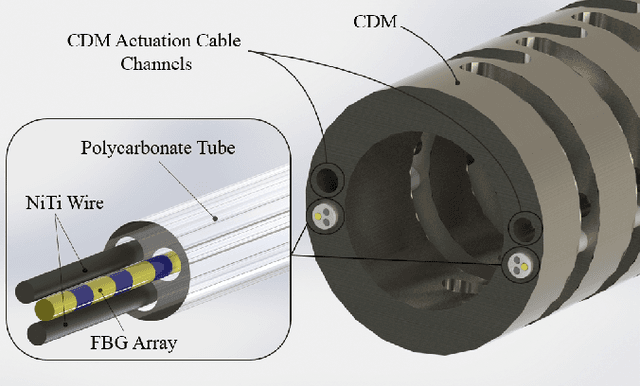
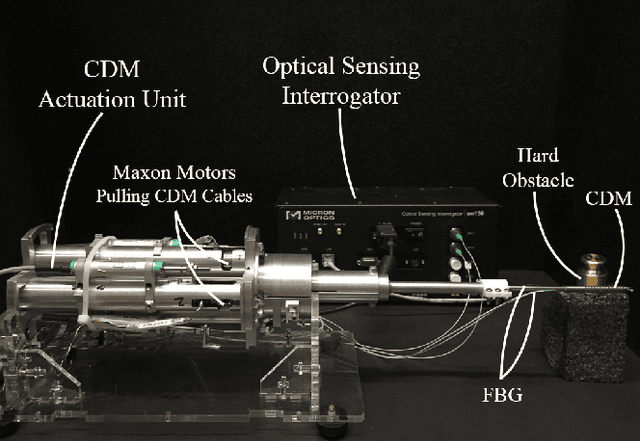
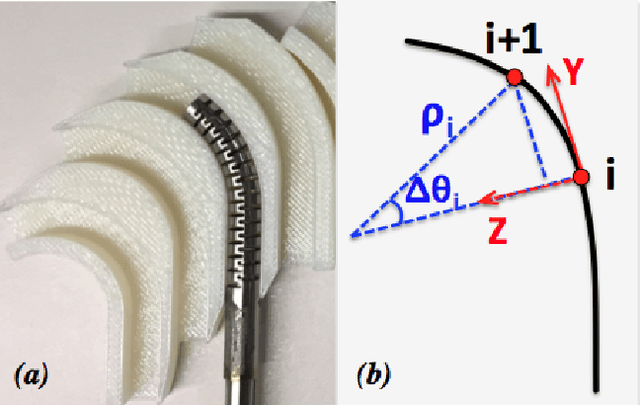
Tracking and controlling the shape of continuum dexterous manipulators (CDM) in constraint environments is a challenging task. The imposed constraints and interaction with unknown obstacles may conform the CDM's shape and therefore demands for shape sensing methods which do not rely on direct line of sight. To address these issues, we integrate a novel Fiber Bragg Grating (FBG) shape sensing unit into a CDM, reconstruct the shape in real-time, and develop an optimization-based control algorithm using FBG tip position feedback. The CDM is designed for less-invasive treatment of osteolysis (bone degradation). To evaluate the performance of the feedback control algorithm when the CDM interacts with obstacles, we perform a set of experiments similar to the real scenario of the CDM interaction with soft and hard lesions during the treatment of osteolysis. In addition, we propose methods for identification of the CDM collisions with soft or hard obstacles using the jacobian information. Results demonstrate successful control of the CDM tip based on the FBG feedback and indicate repeatability and robustness of the proposed method when interacting with unknown obstacles.
On The Effect of Vibration on Shape Sensing of Continuum Manipulators Using Fiber Bragg Gratings
Jan 22, 2018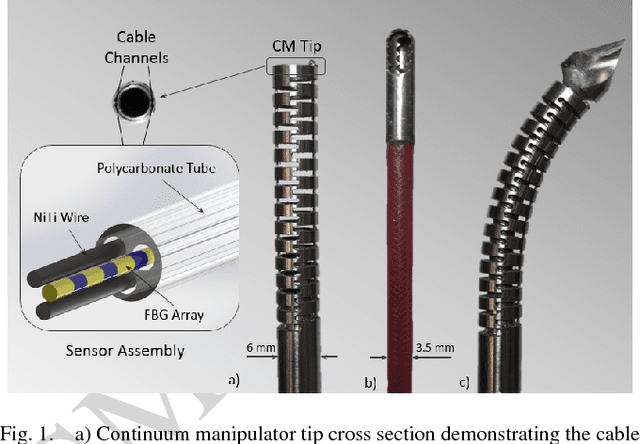
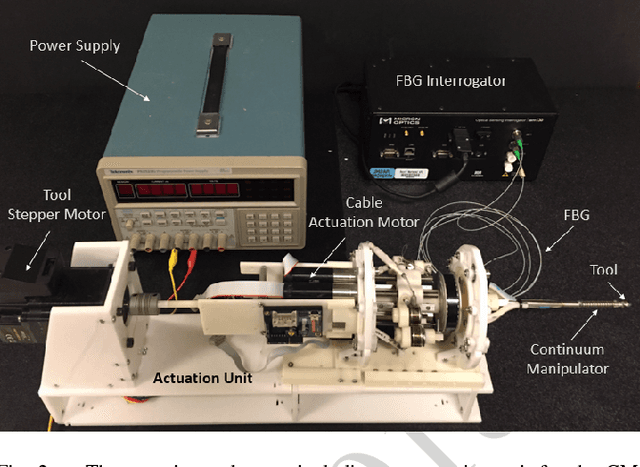
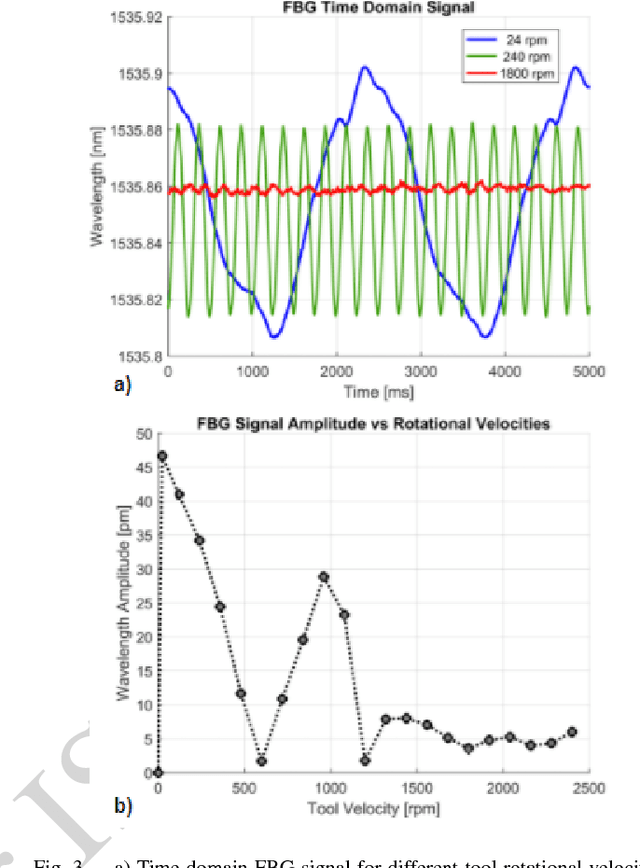
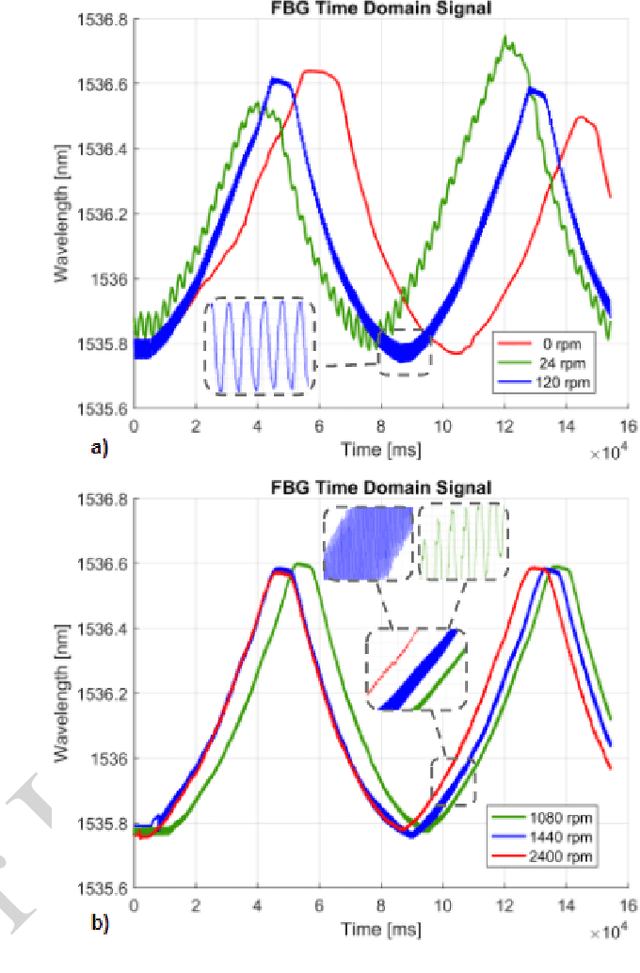
Fiber Bragg Grating (FBG) has shown great potential in shape and force sensing of continuum manipulators (CM) and biopsy needles. In the recent years, many researchers have studied different manufacturing and modeling techniques of FBG-based force and shape sensors for medical applications. These studies mainly focus on obtaining shape and force information in a static (or quasi-static) environment. In this paper, however, we study and evaluate dynamic environments where the FBG data is affected by vibration caused by a harmonic force e.g. a rotational debriding tool harmonically exciting the CM and the FBG-based shape sensor. In such situations, appropriate pre-processing of the FBG signal is necessary in order to infer correct information from the raw signal. We look at an example of such dynamic environments in the less invasive treatment of osteolysis by studying the FBG data both in time- and frequency-domain in presence of vibration due to a debriding tool rotating inside the lumen of the CM.
A Convex Optimization Framework for Constrained Concurrent Motion Control of a Hybrid Redundant Surgical System
Jan 21, 2018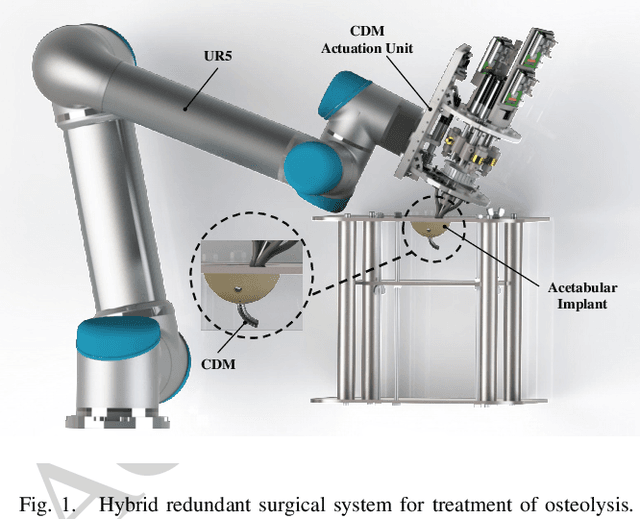
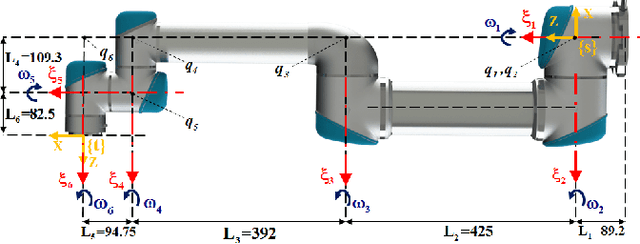
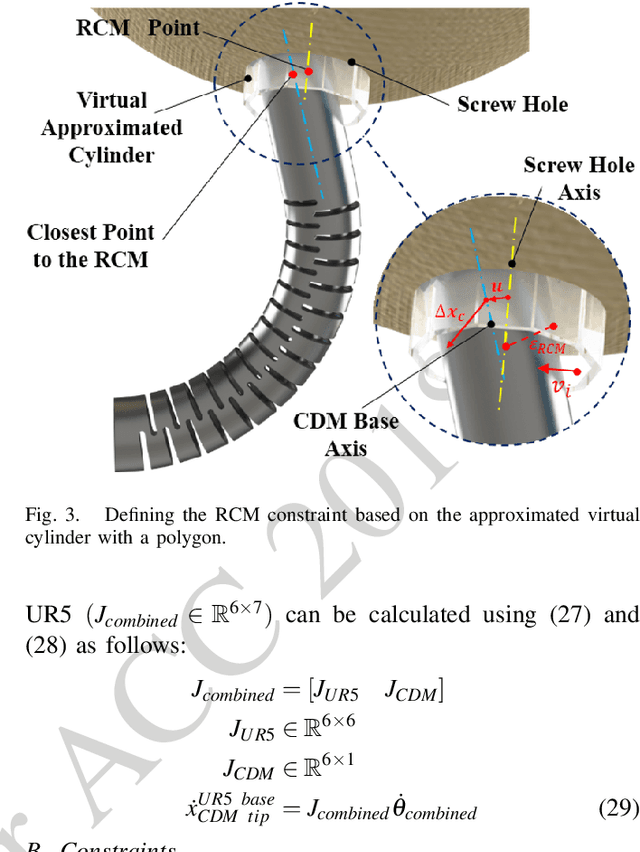
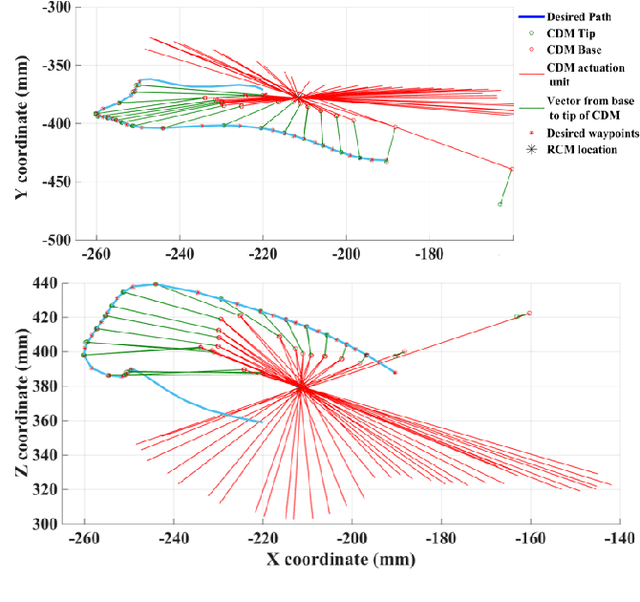
We present a constrained motion control framework for a redundant surgical system designed for minimally invasive treatment of pelvic osteolysis. The framework comprises a kinematics model of a six Degrees-of-Freedom (DoF) robotic arm integrated with a one DoF continuum manipulator as well as a novel convex optimization redundancy resolution controller. To resolve the redundancy resolution problem, formulated as a constrained l2-regularized quadratic minimization, we study and evaluate the potential use of an optimally tuned alternating direction method of multipliers (ADMM) algorithm. To this end, we prove global convergence of the algorithm at linear rate and propose expressions for the involved parameters resulting in a fast convergence. Simulations on the robotic system verified our analytical derivations and showed the capability and robustness of the ADMM algorithm in constrained motion control of our redundant surgical system.