 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Annotation of Hip Anatomy in Fluoroscopy for Robust and Efficient 2D/3D Registration
Nov 16, 2019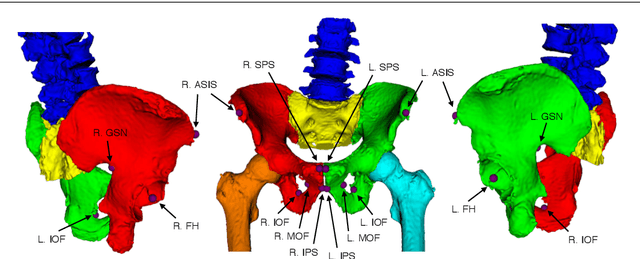
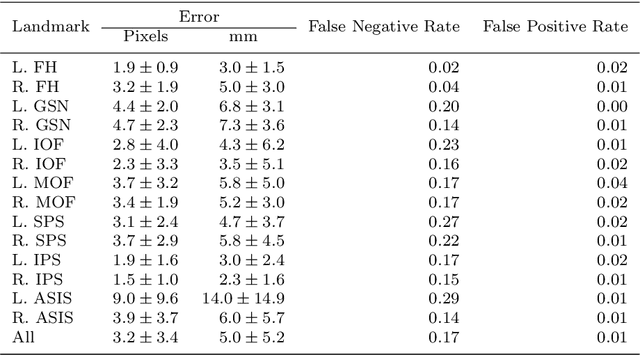
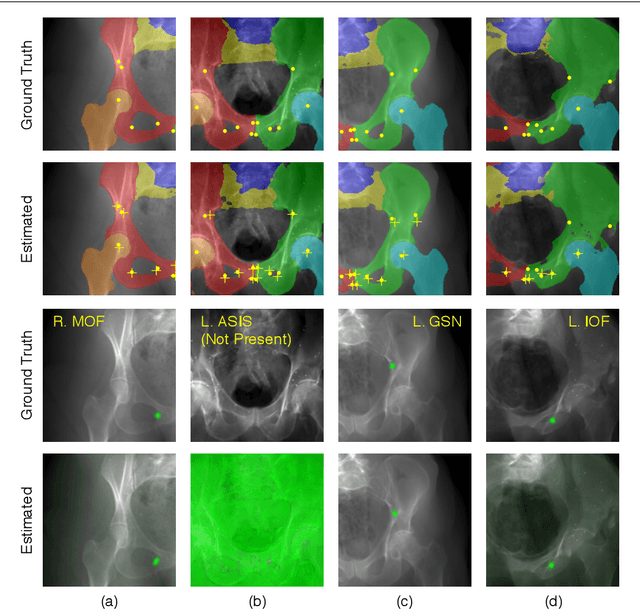
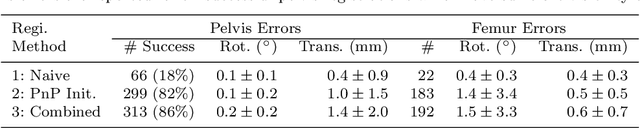
Fluoroscopy is the standard imaging modality used to guide hip surgery and is therefore a natural sensor for computer-assisted navigation. In order to efficiently solve the complex registration problems presented during navigation, human-assisted annotations of the intraoperative image are typically required. This manual initialization interferes with the surgical workflow and diminishes any advantages gained from navigation. We propose a method for fully automatic registration using annotations produced by a neural network. Neural networks are trained to simultaneously segment anatomy and identify landmarks in fluoroscopy. Training data is obtained using an intraoperatively incompatible 2D/3D registration of hip anatomy. Ground truth 2D labels are established using projected 3D annotations. Intraoperative registration couples an intensity-based strategy with annotations inferred by the network and requires no human assistance. Ground truth labels were obtained in 366 fluoroscopic images across 6 cadaveric specimens. In a leave-one-subject-out experiment, networks obtained mean dice coefficients for left and right hemipelves, left and right femurs of 0.86, 0.87, 0.90, and 0.84. The mean 2D landmark error was 5.0 mm. The pelvis was registered within 1 degree for 86% of the images when using the proposed intraoperative approach with an average runtime of 7 seconds. In comparison, an intensity-only approach without manual initialization, registered the pelvis to 1 degree in 18% of images. We have created the first accurately annotated, non-synthetic, dataset of hip fluoroscopy. By using these annotations as training data for neural networks, state of the art performance in fluoroscopic segmentation and landmark localization was achieved. Integrating these annotations allows for a robust, fully automatic, and efficient intraoperative registration during fluoroscopic navigation of the hip.
Fast and Automatic Periacetabular Osteotomy Fragment Pose Estimation Using Intraoperatively Implanted Fiducials and Single-View Fluoroscopy
Oct 22, 2019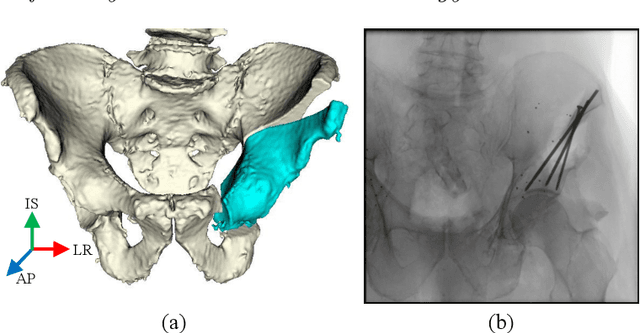
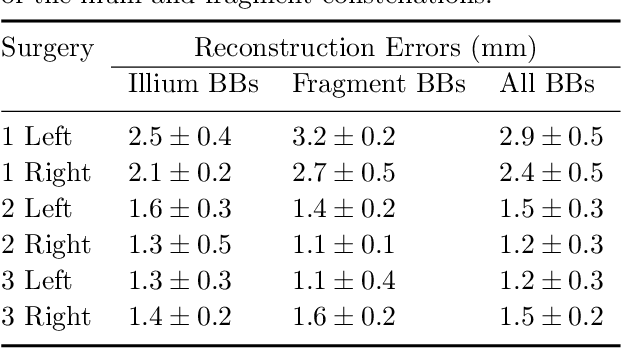
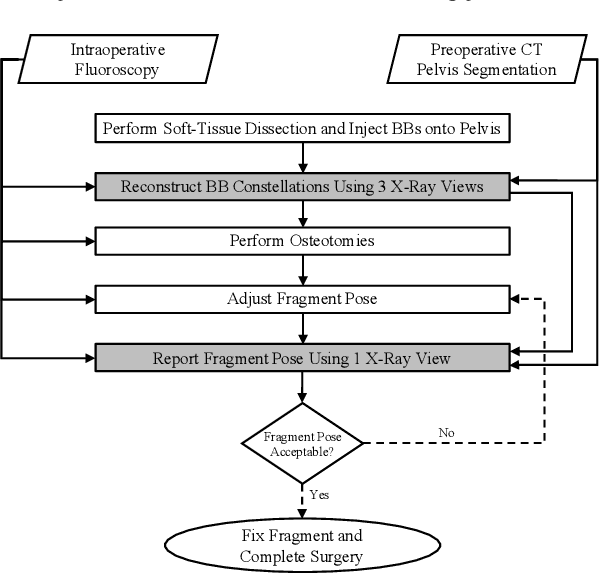
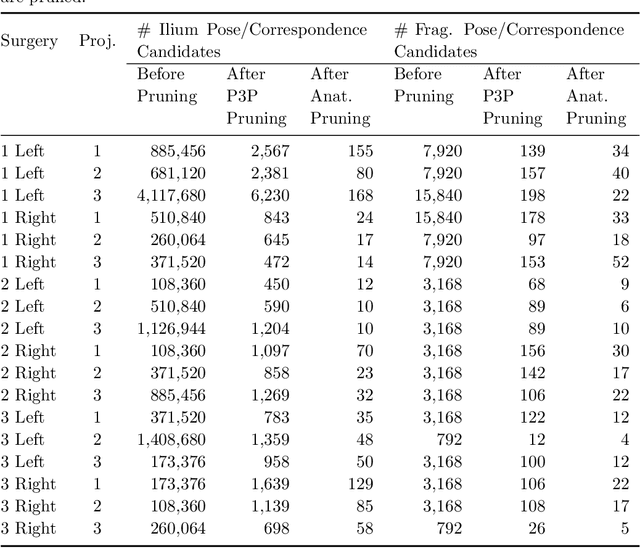
Accurate and consistent mental interpretation of fluoroscopy to determine the position and orientation of acetabular bone fragments in 3D space is difficult. We propose a computer assisted approach that uses a single fluoroscopic view and quickly reports the pose of an acetabular fragment without any user input or initialization. Intraoperatively, but prior to any osteotomies, two constellations of metallic ball-bearings (BBs) are injected into the wing of a patient's ilium and lateral superior pubic ramus. One constellation is located on the expected acetabular fragment, and the other is located on the remaining, larger, pelvis fragment. The 3D locations of each BB are reconstructed using three fluoroscopic views and 2D/3D registrations to a preoperative CT scan of the pelvis. The relative pose of the fragment is established by estimating the movement of the two BB constellations using a single fluoroscopic view taken after osteotomy and fragment relocation. BB detection and inter-view correspondences are automatically computed throughout the processing pipeline. The proposed method was evaluated on a multitude of fluoroscopic images collected from six cadaveric surgeries performed bilaterally on three specimens. Mean fragment rotation error was 2.4 +/- 1.0 degrees, mean translation error was 2.1 +/- 0.6 mm, and mean 3D lateral center edge angle error was 1.0 +/- 0.5 degrees. The average runtime of the single-view pose estimation was 0.7 +/- 0.2 seconds. The proposed method demonstrates accuracy similar to other state of the art systems which require optical tracking systems or multiple-view 2D/3D registrations with manual input. The errors reported on fragment poses and lateral center edge angles are within the margins required for accurate intraoperative evaluation of femoral head coverage.
FBG-Based Position Estimation of Highly Deformable Continuum Manipulators: Model-Dependent vs. Data-Driven Approaches
Dec 20, 2018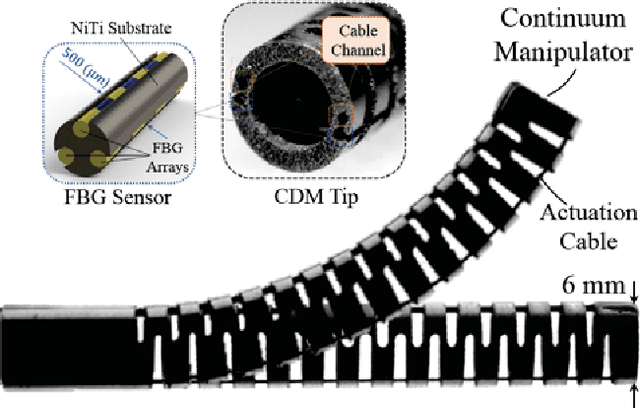
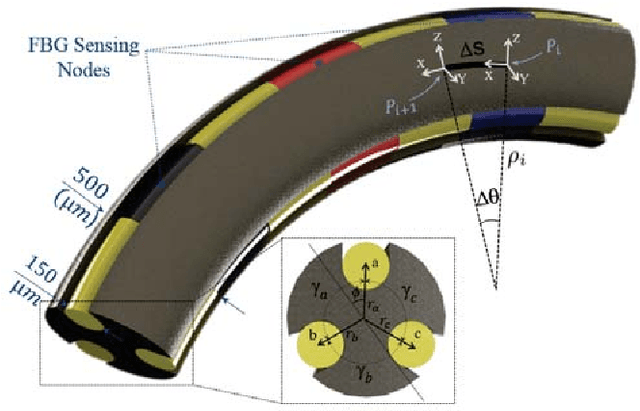
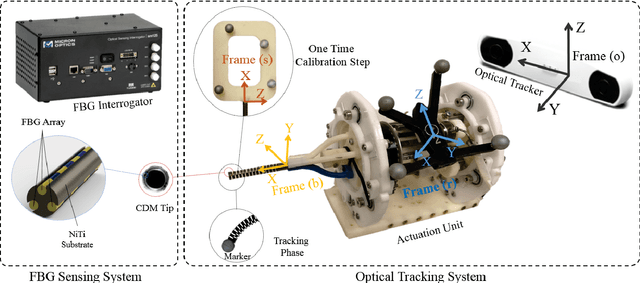
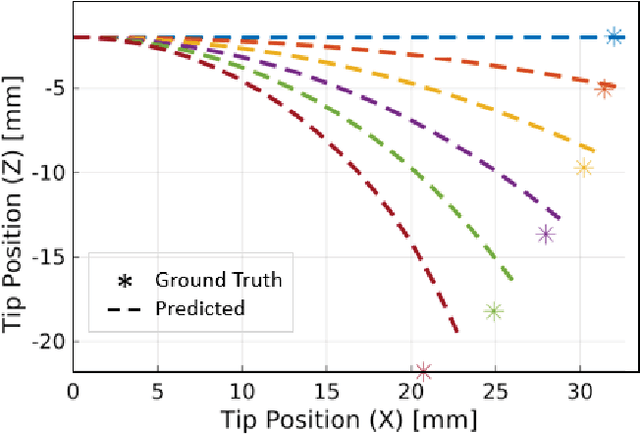
Conventional shape sensing techniques using Fiber Bragg Grating (FBG) involve finding the curvature at discrete FBG active areas and integrating curvature over the length of the continuum dexterous manipulator (CDM) for tip position estimation (TPE). However, due to limited number of sensing locations and many geometrical assumptions, these methods are prone to large error propagation especially when the CDM undergoes large deflections. In this paper, we study the complications of using the conventional TPE methods that are dependent on sensor model and propose a new data-driven method that overcomes these challenges. The proposed method consists of a regression model that takes FBG wavelength raw data as input and directly estimates the CDM's tip position. This model is pre-operatively (off-line) trained on position information from optical trackers/cameras (as the ground truth) and it intra-operatively (on-line) estimates CDM tip position using only the FBG wavelength data. The method's performance is evaluated on a CDM developed for orthopedic applications, and the results are compared to conventional model-dependent methods during large deflection bendings. Mean absolute TPE error (and standard deviation) of 1.52 (0.67) mm and 0.11 (0.1) mm with maximum absolute errors of 3.63 mm and 0.62 mm for the conventional and the proposed data-driven techniques were obtained, respectively. These results demonstrate a significant out-performance of the proposed data-driven approach versus the conventional estimation technique.
Inroads Toward Robot-Assisted Internal Fixation of Bone Fractures Using a Bendable Medical Screw and the Curved Drilling Technique
Jun 30, 2018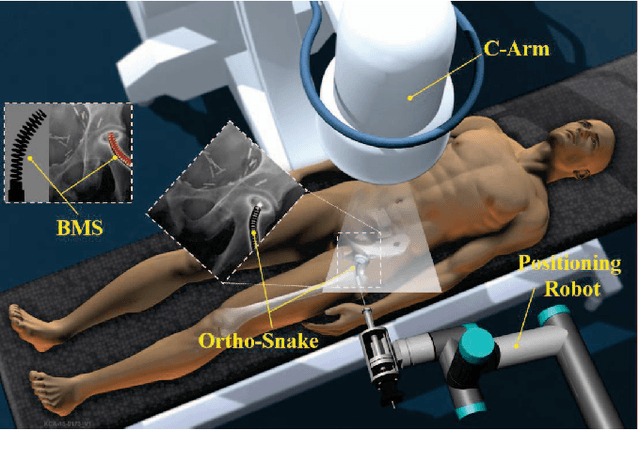
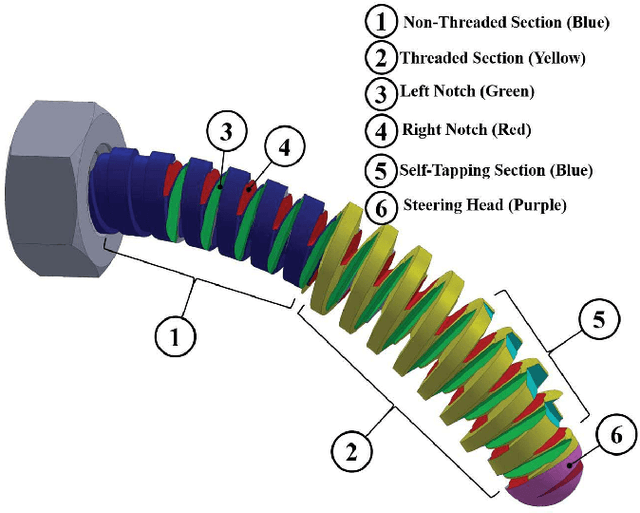
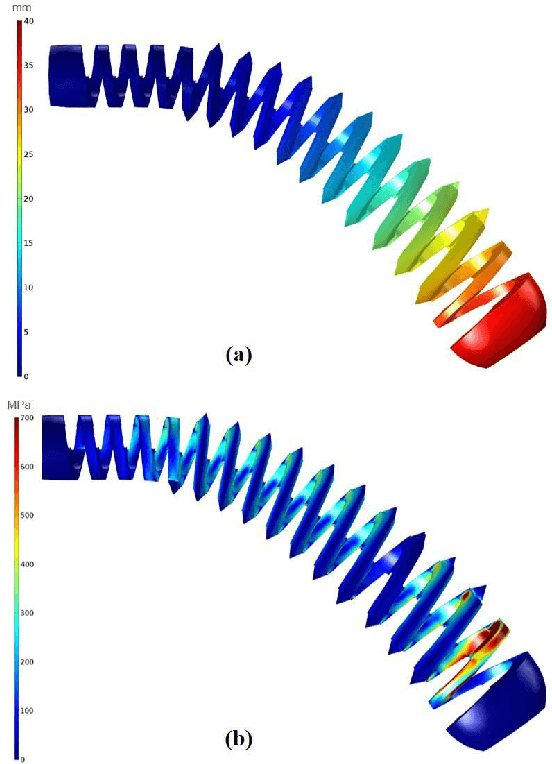
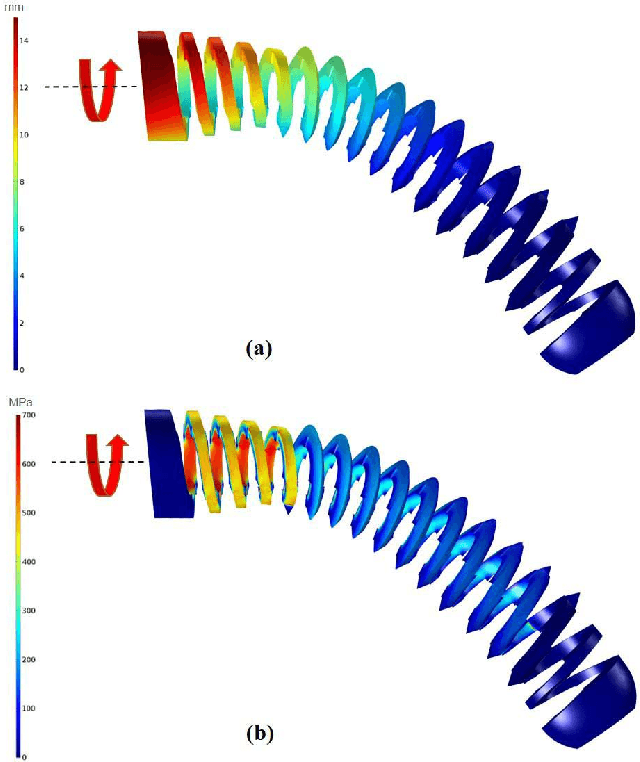
Internal fixation is a common orthopedic procedure in which a rigid screw is used to fix fragments of a fractured bone together and expedite the healing process. However, the rigidity of the screw, geometry of the fractured anatomy (e.g. femur and pelvis), and patient age can cause an array of complications during screw placement, such as improper fracture healing due to misalignment of the bone fragments, lengthy procedure time and subsequently high radiation exposure. To address these issues, we propose a minimally invasive robot-assisted procedure comprising of a continuum robot, called ortho-snake, together with a novel bendable medical screw (BMS) for fixating the fractures. We describe the implementation of a curved drilling technique and focus on the design, manufacturing, and evaluation of a novel BMS, which can passively morph into the drilled curved tunnels with various curvatures. We evaluate the performance and efficacy of the proposed BMS using both finite element simulations as well as experiments conducted on synthetic bone samples.