 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGet Back Here: Robust Imitation by Return-to-Distribution Planning
May 02, 2023We consider the Imitation Learning (IL) setup where expert data are not collected on the actual deployment environment but on a different version. To address the resulting distribution shift, we combine behavior cloning (BC) with a planner that is tasked to bring the agent back to states visited by the expert whenever the agent deviates from the demonstration distribution. The resulting algorithm, POIR, can be trained offline, and leverages online interactions to efficiently fine-tune its planner to improve performance over time. We test POIR on a variety of human-generated manipulation demonstrations in a realistic robotic manipulation simulator and show robustness of the learned policy to different initial state distributions and noisy dynamics.
Learning Energy Networks with Generalized Fenchel-Young Losses
May 19, 2022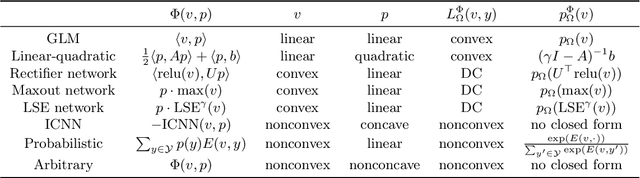
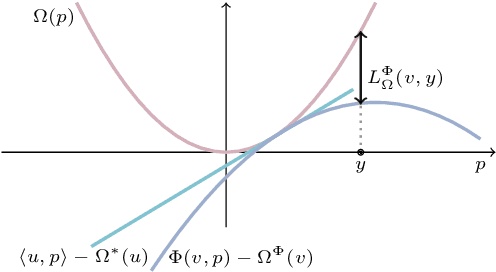
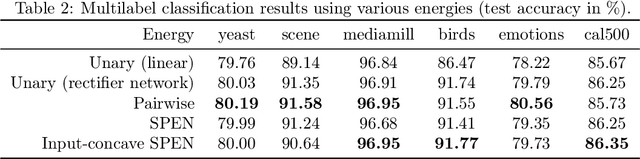
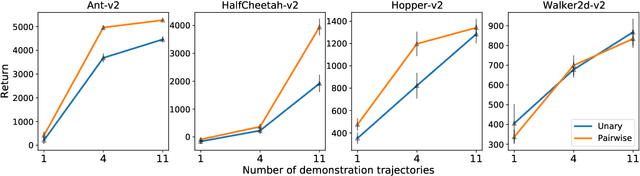
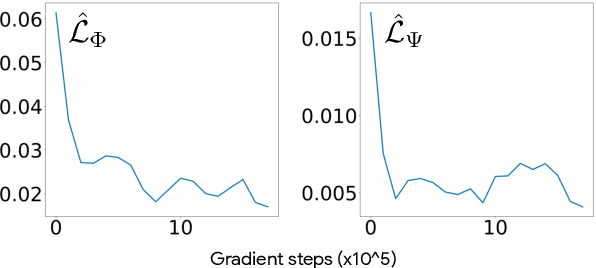
Energy-based models, a.k.a. energy networks, perform inference by optimizing an energy function, typically parametrized by a neural network. This allows one to capture potentially complex relationships between inputs and outputs. To learn the parameters of the energy function, the solution to that optimization problem is typically fed into a loss function. The key challenge for training energy networks lies in computing loss gradients, as this typically requires argmin/argmax differentiation. In this paper, building upon a generalized notion of conjugate function, which replaces the usual bilinear pairing with a general energy function, we propose generalized Fenchel-Young losses, a natural loss construction for learning energy networks. Our losses enjoy many desirable properties and their gradients can be computed efficiently without argmin/argmax differentiation. We also prove the calibration of their excess risk in the case of linear-concave energies. We demonstrate our losses on multilabel classification and imitation learning tasks.
Continuous Control with Action Quantization from Demonstrations
Oct 19, 2021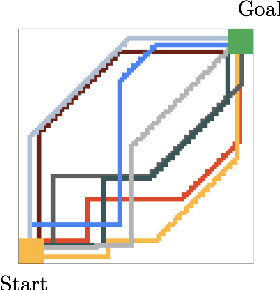
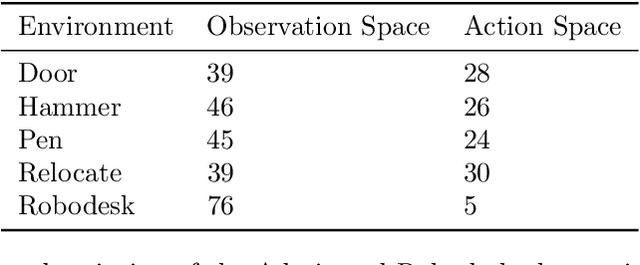
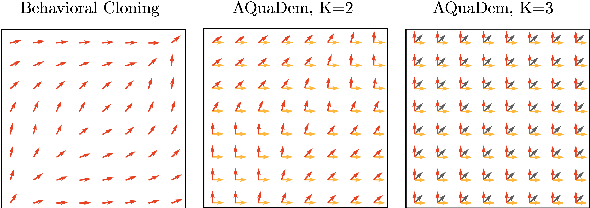
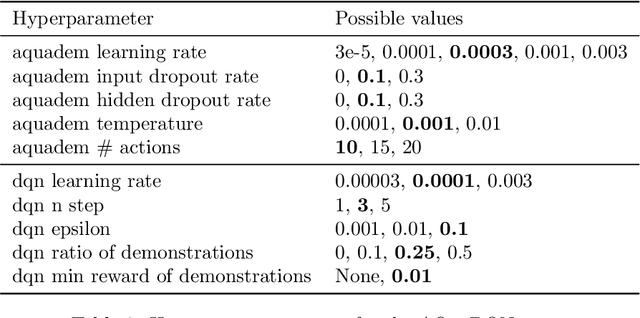
In Reinforcement Learning (RL), discrete actions, as opposed to continuous actions, result in less complex exploration problems and the immediate computation of the maximum of the action-value function which is central to dynamic programming-based methods. In this paper, we propose a novel method: Action Quantization from Demonstrations (AQuaDem) to learn a discretization of continuous action spaces by leveraging the priors of demonstrations. This dramatically reduces the exploration problem, since the actions faced by the agent not only are in a finite number but also are plausible in light of the demonstrator's behavior. By discretizing the action space we can apply any discrete action deep RL algorithm to the continuous control problem. We evaluate the proposed method on three different setups: RL with demonstrations, RL with play data --demonstrations of a human playing in an environment but not solving any specific task-- and Imitation Learning. For all three setups, we only consider human data, which is more challenging than synthetic data. We found that AQuaDem consistently outperforms state-of-the-art continuous control methods, both in terms of performance and sample efficiency. We provide visualizations and videos in the paper's website: https://google-research.github.io/aquadem.
Offline Reinforcement Learning as Anti-Exploration
Jun 11, 2021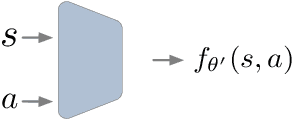
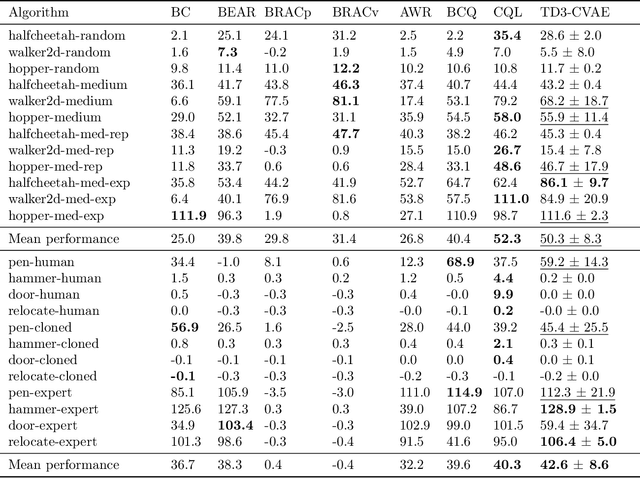
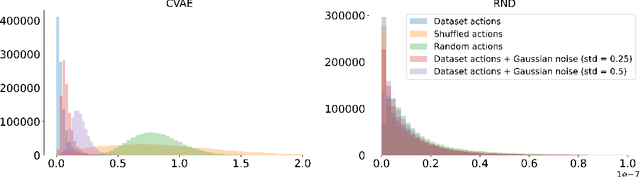
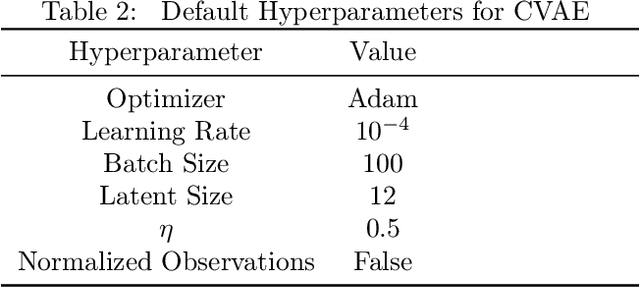
Offline Reinforcement Learning (RL) aims at learning an optimal control from a fixed dataset, without interactions with the system. An agent in this setting should avoid selecting actions whose consequences cannot be predicted from the data. This is the converse of exploration in RL, which favors such actions. We thus take inspiration from the literature on bonus-based exploration to design a new offline RL agent. The core idea is to subtract a prediction-based exploration bonus from the reward, instead of adding it for exploration. This allows the policy to stay close to the support of the dataset. We connect this approach to a more common regularization of the learned policy towards the data. Instantiated with a bonus based on the prediction error of a variational autoencoder, we show that our agent is competitive with the state of the art on a set of continuous control locomotion and manipulation tasks.
What Matters for Adversarial Imitation Learning?
Jun 01, 2021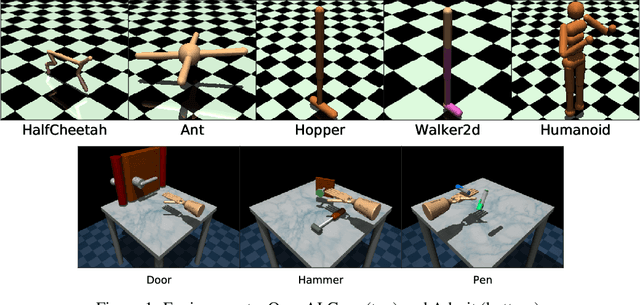

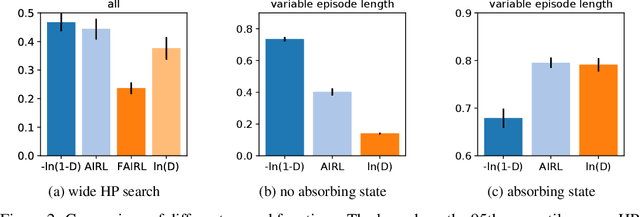
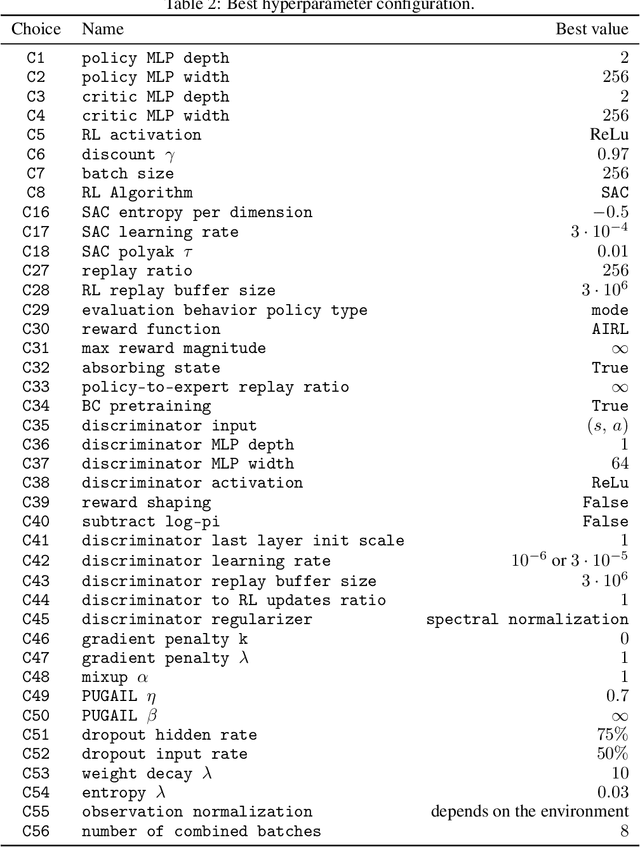
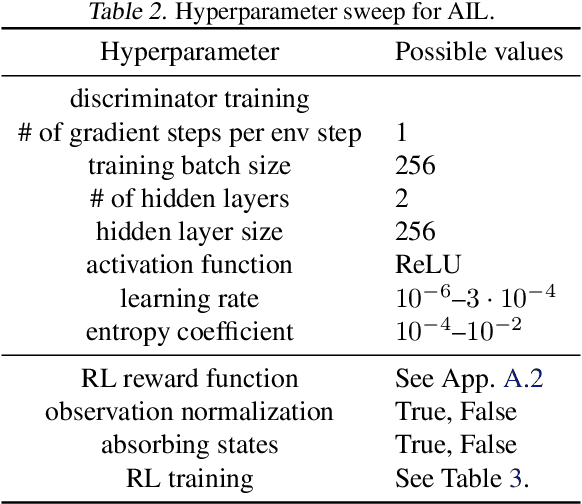
Adversarial imitation learning has become a popular framework for imitation in continuous control. Over the years, several variations of its components were proposed to enhance the performance of the learned policies as well as the sample complexity of the algorithm. In practice, these choices are rarely tested all together in rigorous empirical studies. It is therefore difficult to discuss and understand what choices, among the high-level algorithmic options as well as low-level implementation details, matter. To tackle this issue, we implement more than 50 of these choices in a generic adversarial imitation learning framework and investigate their impacts in a large-scale study (>500k trained agents) with both synthetic and human-generated demonstrations. While many of our findings confirm common practices, some of them are surprising or even contradict prior work. In particular, our results suggest that artificial demonstrations are not a good proxy for human data and that the very common practice of evaluating imitation algorithms only with synthetic demonstrations may lead to algorithms which perform poorly in the more realistic scenarios with human demonstrations.
Hyperparameter Selection for Imitation Learning
May 25, 2021
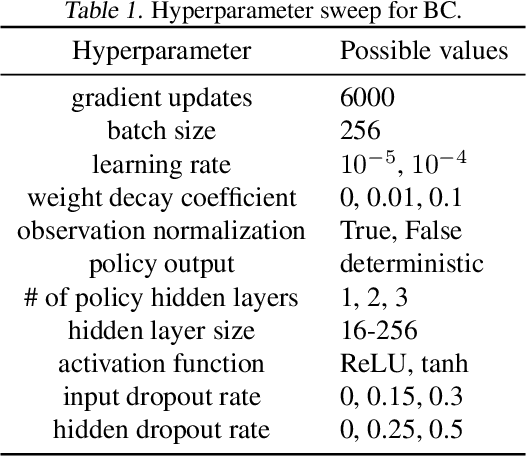
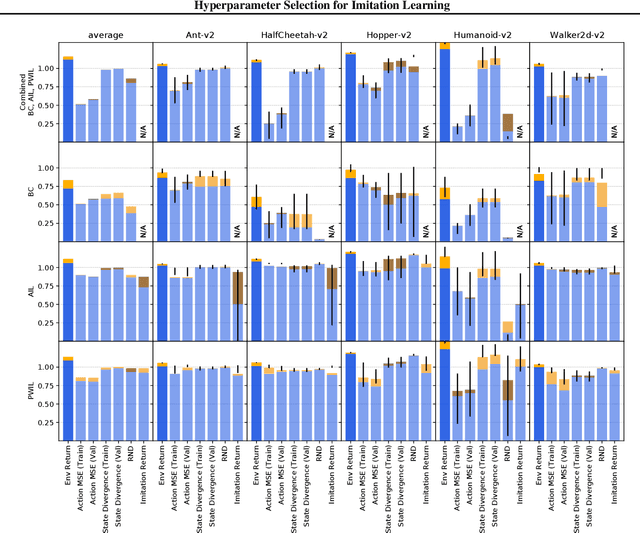
We address the issue of tuning hyperparameters (HPs) for imitation learning algorithms in the context of continuous-control, when the underlying reward function of the demonstrating expert cannot be observed at any time. The vast literature in imitation learning mostly considers this reward function to be available for HP selection, but this is not a realistic setting. Indeed, would this reward function be available, it could then directly be used for policy training and imitation would not be necessary. To tackle this mostly ignored problem, we propose a number of possible proxies to the external reward. We evaluate them in an extensive empirical study (more than 10'000 agents across 9 environments) and make practical recommendations for selecting HPs. Our results show that while imitation learning algorithms are sensitive to HP choices, it is often possible to select good enough HPs through a proxy to the reward function.
Offline Reinforcement Learning with Pseudometric Learning
Mar 02, 2021
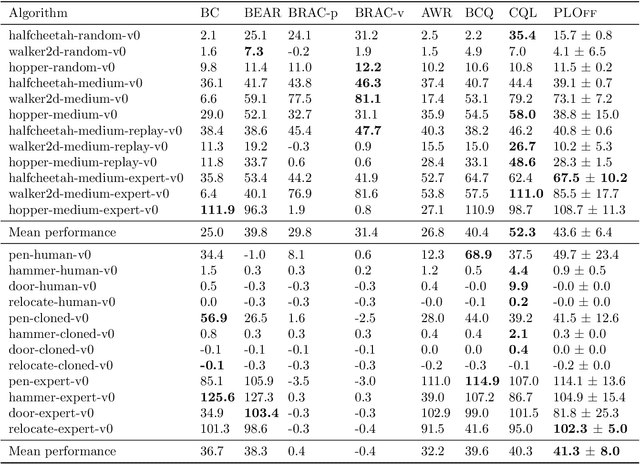

Offline Reinforcement Learning methods seek to learn a policy from logged transitions of an environment, without any interaction. In the presence of function approximation, and under the assumption of limited coverage of the state-action space of the environment, it is necessary to enforce the policy to visit state-action pairs close to the support of logged transitions. In this work, we propose an iterative procedure to learn a pseudometric (closely related to bisimulation metrics) from logged transitions, and use it to define this notion of closeness. We show its convergence and extend it to the function approximation setting. We then use this pseudometric to define a new lookup based bonus in an actor-critic algorithm: PLOff. This bonus encourages the actor to stay close, in terms of the defined pseudometric, to the support of logged transitions. Finally, we evaluate the method on hand manipulation and locomotion tasks.
Show me the Way: Intrinsic Motivation from Demonstrations
Jun 23, 2020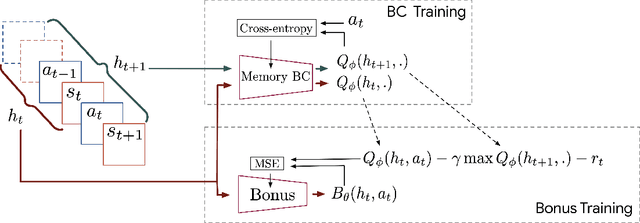
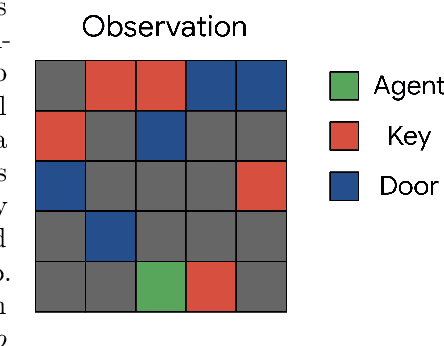

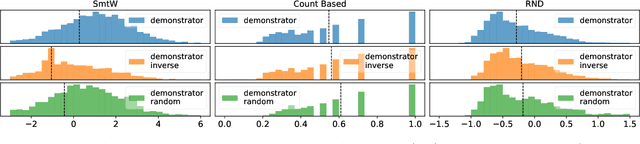
The study of exploration in Reinforcement Learning (RL) has a long history but it remains an unsolved problem. Recent approaches applied to Deep RL are based on the concept of intrinsic motivation and are implemented in the shape of an exploration bonus, added to the environment reward, that encourages visiting exhaustively the whole state-action space as fast as possible. This approach is supported by the vast theory of RL for which convergence to optimality assumes exhaustive exploration. Yet, Human Beings and mammals do not exhaustively explore the world and their motivation is not only based on novelty but also on diverse other factors (e.g., curiosity, fun, style, pleasure, safety, competition, etc.). They optimize for life-long learning and train to learn transferable skills in playgrounds without obvious goals. They also apply innate or learned priors to save time and stay safe. For these reasons, we propose a method for learning an exploration bonus from demonstrations that could transfer these motivations to an artificial agent without explicitly modeling them. Using an inverse RL approach, we show that different exploration behaviors can be learnt and efficiently used by RL agents to solve tasks for which exhaustive exploration is prohibitive.
Primal Wasserstein Imitation Learning
Jun 08, 2020
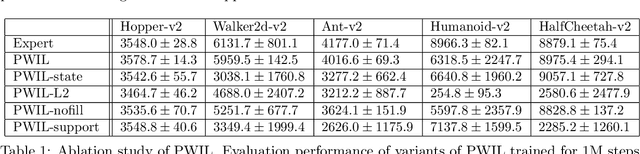
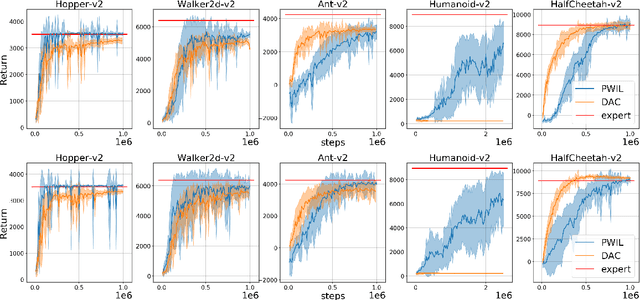
Imitation Learning (IL) methods seek to match the behavior of an agent with that of an expert. In the present work, we propose a new IL method based on a conceptually simple algorithm: Primal Wasserstein Imitation Learning (PWIL), which ties to the primal form of the Wasserstein distance between the expert and the agent state-action distributions. We present a reward function which is derived offline, as opposed to recent adversarial IL algorithms that learn a reward function through interactions with the environment, and which requires little fine-tuning. We show that we can recover expert behavior on a variety of continuous control tasks of the MuJoCo domain in a sample efficient manner in terms of agent interactions and of expert interactions with the environment. Finally, we show that the behavior of the agent we train matches the behavior of the expert with the Wasserstein distance, rather than the commonly used proxy of performance.
The Value-Improvement Path: Towards Better Representations for Reinforcement Learning
Jun 03, 2020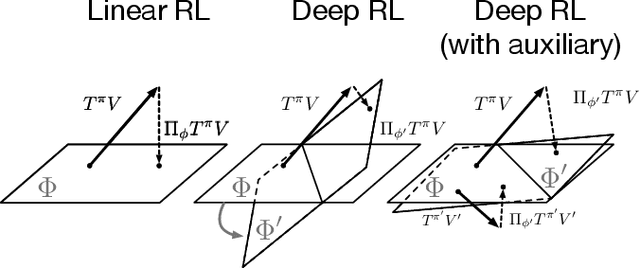
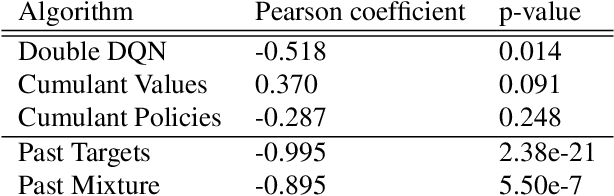

In value-based reinforcement learning (RL), unlike in supervised learning, the agent faces not a single, stationary, approximation problem, but a sequence of value prediction problems. Each time the policy improves, the nature of the problem changes, shifting both the distribution of states and their values. In this paper we take a novel perspective, arguing that the value prediction problems faced by an RL agent should not be addressed in isolation, but rather as a single, holistic, prediction problem. An RL algorithm generates a sequence of policies that, at least approximately, improve towards the optimal policy. We explicitly characterize the associated sequence of value functions and call it the value-improvement path. Our main idea is to approximate the value-improvement path holistically, rather than to solely track the value function of the current policy. Specifically, we discuss the impact that this holistic view of RL has on representation learning. We demonstrate that a representation that spans the past value-improvement path will also provide an accurate value approximation for future policy improvements. We use this insight to better understand existing approaches to auxiliary tasks and to propose new ones. To test our hypothesis empirically, we augmented a standard deep RL agent with an auxiliary task of learning the value-improvement path. In a study of Atari 2600 games, the augmented agent achieved approximately double the mean and median performance of the baseline agent.