 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed-Strategy Nash Equilibrium for Crowd Navigation
Mar 05, 2024



We address the problem of finding mixed-strategy Nash equilibrium for crowd navigation. Mixed-strategy Nash equilibrium provides a rigorous model for the robot to anticipate uncertain yet cooperative human behavior in crowds, but the computation cost is often too high for scalable and real-time decision-making. Here we prove that a simple iterative Bayesian updating scheme converges to the Nash equilibrium of a mixed-strategy social navigation game. Furthermore, we propose a data-driven framework to construct the game by initializing agent strategies as Gaussian processes learned from human datasets. Based on the proposed mixed-strategy Nash equilibrium model, we develop a sampling-based crowd navigation framework that can be integrated into existing navigation methods and runs in real-time on a laptop CPU. We evaluate our framework in both simulated environments and real-world human datasets in unstructured environments. Our framework consistently outperforms both non-learning and learning-based methods on both safety and navigation efficiency and reaches human-level crowd navigation performance on top of a meta-planner.
Human Robot Pacing Mismatch
Mar 03, 2024



A widely accepted explanation for robots planning overcautious or overaggressive trajectories alongside human is that the crowd density exceeds a threshold such that all feasible trajectories are considered unsafe -- the freezing robot problem. However, even with low crowd density, the robot's navigation performance could still drop drastically when in close proximity to human. In this work, we argue that a broader cause of suboptimal navigation performance near human is due to the robot's misjudgement for the human's willingness (flexibility) to share space with others, particularly when the robot assumes the human's flexibility holds constant during interaction, a phenomenon of what we call human robot pacing mismatch. We show that the necessary condition for solving pacing mismatch is to model the evolution of both the robot and the human's flexibility during decision making, a strategy called distribution space modeling. We demonstrate the advantage of distribution space coupling through an anecdotal case study and discuss the future directions of solving human robot pacing mismatch.
Fast Ergodic Search with Kernel Functions
Mar 03, 2024



Ergodic search enables optimal exploration of an information distribution while guaranteeing the asymptotic coverage of the search space. However, current methods typically have exponential computation complexity in the search space dimension and are restricted to Euclidean space. We introduce a computationally efficient ergodic search method. Our contributions are two-fold. First, we develop a kernel-based ergodic metric and generalize it from Euclidean space to Lie groups. We formally prove the proposed metric is consistent with the standard ergodic metric while guaranteeing linear complexity in the search space dimension. Secondly, we derive the first-order optimality condition of the kernel ergodic metric for nonlinear systems, which enables efficient trajectory optimization. Comprehensive numerical benchmarks show that the proposed method is at least two orders of magnitude faster than the state-of-the-art algorithm. Finally, we demonstrate the proposed algorithm with a peg-in-hole insertion task. We formulate the problem as a coverage task in the space of SE(3) and use a 30-second-long human demonstration as the prior distribution for ergodic coverage. Ergodicity guarantees the asymptotic solution of the peg-in-hole problem so long as the solution resides within the prior information distribution, which is seen in the 100\% success rate.
Principles and Guidelines for Evaluating Social Robot Navigation Algorithms
Jun 29, 2023



A major challenge to deploying robots widely is navigation in human-populated environments, commonly referred to as social robot navigation. While the field of social navigation has advanced tremendously in recent years, the fair evaluation of algorithms that tackle social navigation remains hard because it involves not just robotic agents moving in static environments but also dynamic human agents and their perceptions of the appropriateness of robot behavior. In contrast, clear, repeatable, and accessible benchmarks have accelerated progress in fields like computer vision, natural language processing and traditional robot navigation by enabling researchers to fairly compare algorithms, revealing limitations of existing solutions and illuminating promising new directions. We believe the same approach can benefit social navigation. In this paper, we pave the road towards common, widely accessible, and repeatable benchmarking criteria to evaluate social robot navigation. Our contributions include (a) a definition of a socially navigating robot as one that respects the principles of safety, comfort, legibility, politeness, social competency, agent understanding, proactivity, and responsiveness to context, (b) guidelines for the use of metrics, development of scenarios, benchmarks, datasets, and simulators to evaluate social navigation, and (c) a design of a social navigation metrics framework to make it easier to compare results from different simulators, robots and datasets.
Move Beyond Trajectories: Distribution Space Coupling for Crowd Navigation
Jun 25, 2021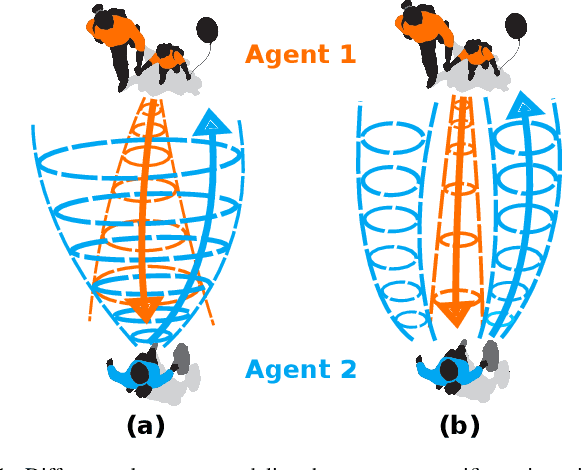
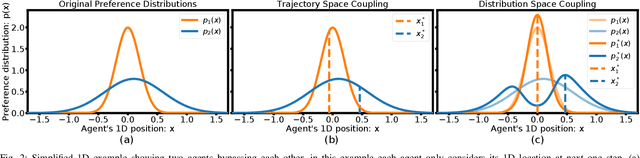
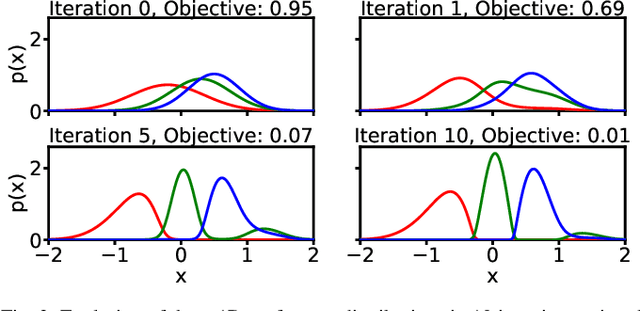
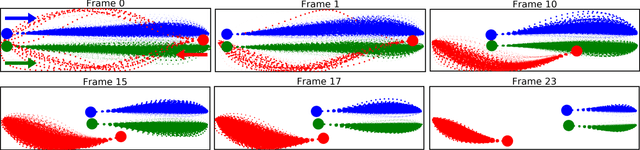
Cooperatively avoiding collision is a critical functionality for robots navigating in dense human crowds, failure of which could lead to either overaggressive or overcautious behavior. A necessary condition for cooperative collision avoidance is to couple the prediction of the agents' trajectories with the planning of the robot's trajectory. However, it is unclear that trajectory based cooperative collision avoidance captures the correct agent attributes. In this work we migrate from trajectory based coupling to a formalism that couples agent preference distributions. In particular, we show that preference distributions (probability density functions representing agents' intentions) can capture higher order statistics of agent behaviors, such as willingness to cooperate. Thus, coupling in distribution space exploits more information about inter-agent cooperation than coupling in trajectory space. We thus introduce a general objective for coupled prediction and planning in distribution space, and propose an iterative best response optimization method based on variational analysis with guaranteed sufficient decrease. Based on this analysis, we develop a sampling-based motion planning framework called DistNav that runs in real time on a laptop CPU. We evaluate our approach on challenging scenarios from both real world datasets and simulation environments, and benchmark against a wide variety of model based and machine learning based approaches. The safety and efficiency statistics of our approach outperform all other models. Finally, we find that DistNav is competitive with human safety and efficiency performance.
* 12 pages