 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWoLF: the Whole-body Locomotion Framework for Quadruped Robots
May 13, 2022
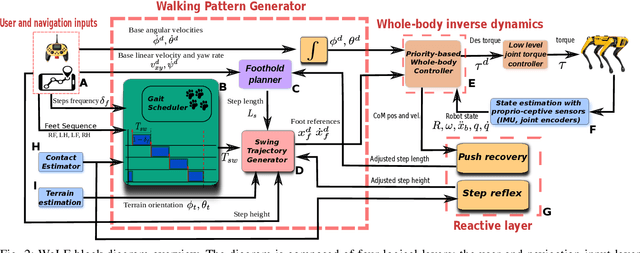
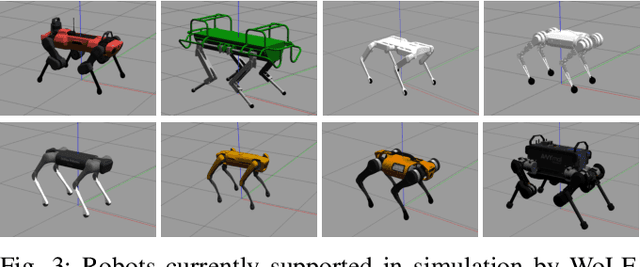
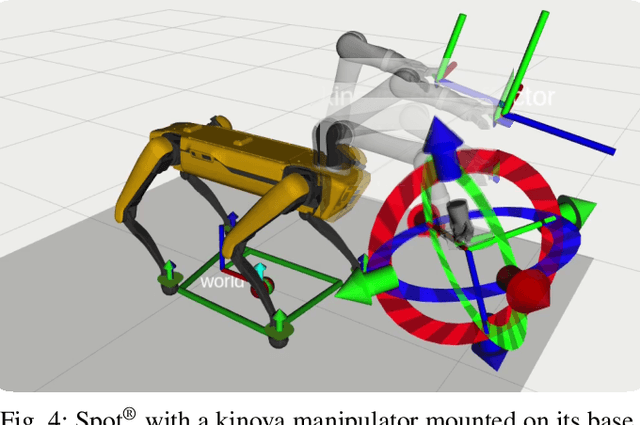
The Whole-Body Locomotion Framework (WoLF) is an end-to-end software suite devoted to the loco-manipulation of quadruped robots. WoLF abstracts the complexity of planning and control of quadrupedal robot hardware into a simple to use and robust software that can be connected through multiple tele-operation devices to different quadruped robot models. Furthermore, WoLF allows controlling mounted devices, such as arms or pan-tilt cameras, jointly with the quadrupedal platform. In this short paper, we introduce the main features of WoLF and its overall software architecture.
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped Robots
Mar 08, 2022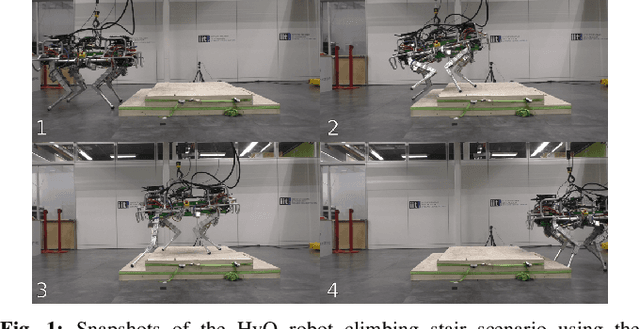

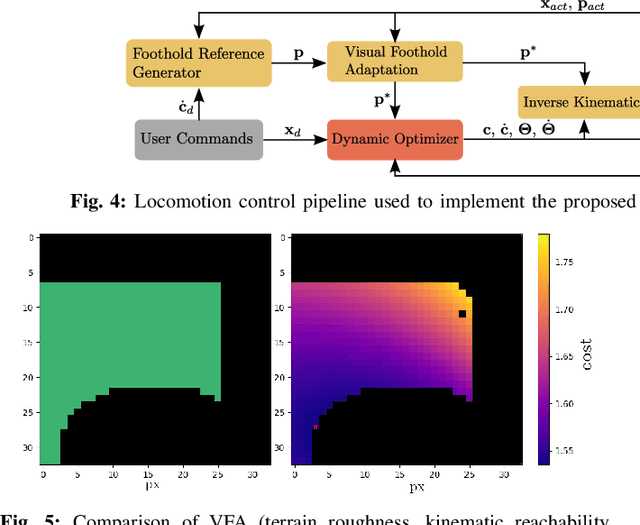
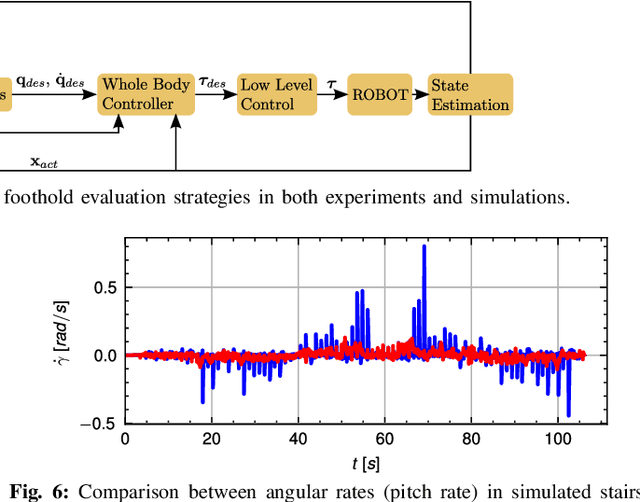
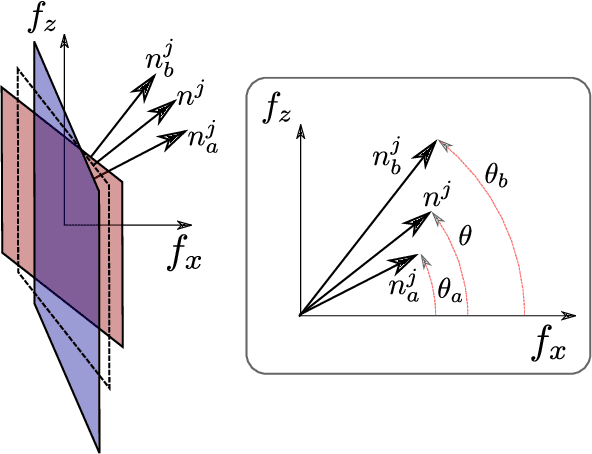
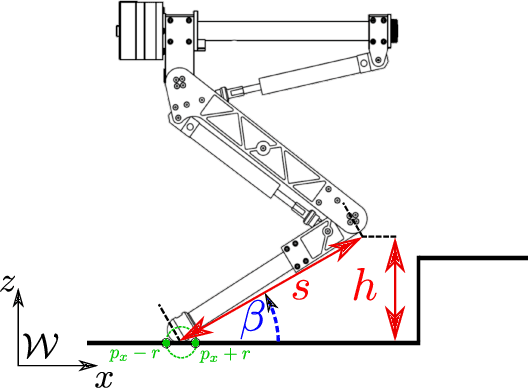
To traverse complex scenarios reliably a legged robot needs to move its base aided by the ground reaction forces, which can only be generated by the legs that are momentarily in contact with the ground. A proper selection of footholds is crucial for maintaining balance. In this paper, we propose a foothold evaluation criterion that considers the transition feasibility for both linear and angular dynamics to overcome complex scenarios. We devise convex and nonlinear formulations as a direct extension of the Continuous Convex Resolution of Centroidal Dynamic Trajectories (C-CROC) in a receding-horizon fashion to grant dynamic feasibility for future behaviours. The criterion is integrated with a Vision-based Foothold Adaptation (VFA) strategy that takes into account the robot kinematics, leg collisions and terrain morphology. We verify the validity of the selected footholds and the generated trajectories in simulation and experiments with the 90kg quadruped robot HyQ.
Mobility-enhanced MPC for Legged Locomotion on Rough Terrain
May 12, 2021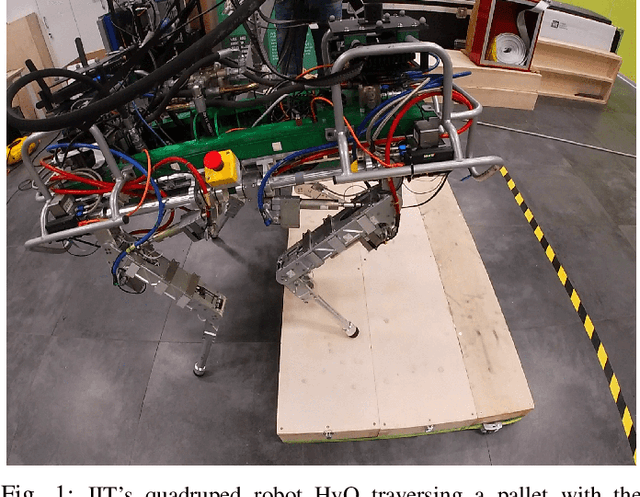
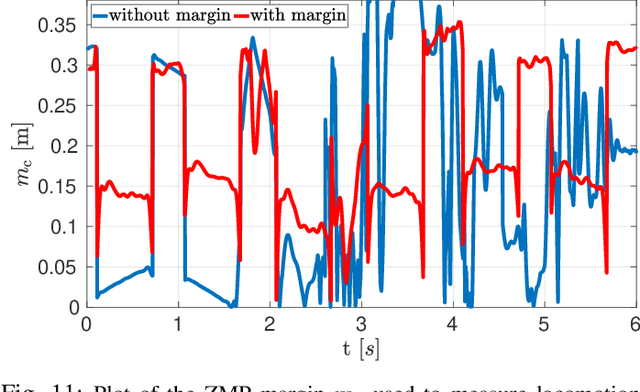
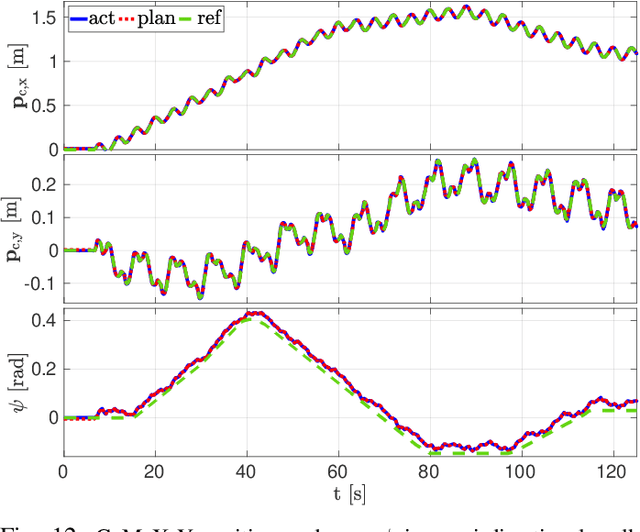
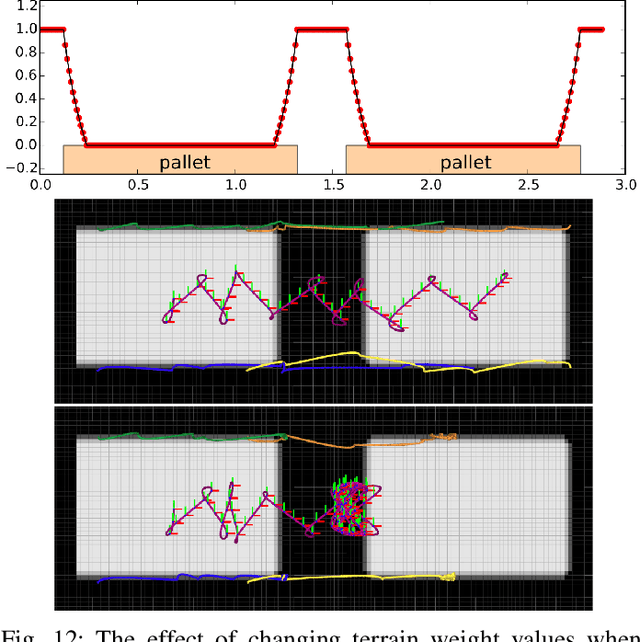
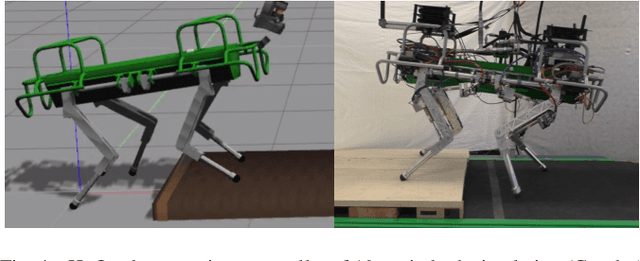
Re-planning in legged locomotion is crucial to track a given set-point while adapting to the terrain and rejecting external disturbances. In this work, we propose a real-time Nonlinear Model Predictive Control (NMPC) tailored to a legged robot for achieving dynamic locomotion on a wide variety of terrains. We introduce a mobility-based criterion to define an NMPC cost that enhances the locomotion of quadruped robots while maximizing leg mobility and staying far from kinematic limits. Our NMPC is based on the real-time iteration scheme that allows us to re-plan online at $25 \, \mathrm{Hz}$ with a time horizon of $2$ seconds. We use the single rigid body dynamic model defined in the center of mass frame that allows to increase the computational efficiency. In simulations, the NMPC is tested to traverse a set of pallets of different sizes, to walk into a V-shaped chimney, and to locomote over rough terrain. We demonstrate the effectiveness of our NMPC with the mobility feature that allowed IIT's $87.4 \,\mathrm{kg}$ quadruped robot HyQ to achieve an omni-directional walk on flat terrain, to traverse a static pallet, and to adapt to a repositioned pallet during a walk in real experiments.
An Efficient Paradigm for Feasibility Guarantees in Legged Locomotion
Nov 16, 2020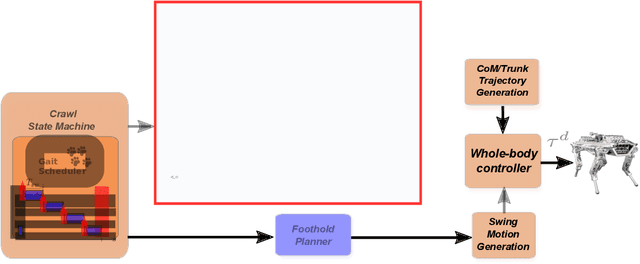
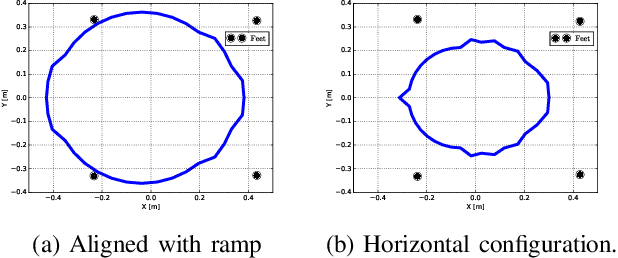
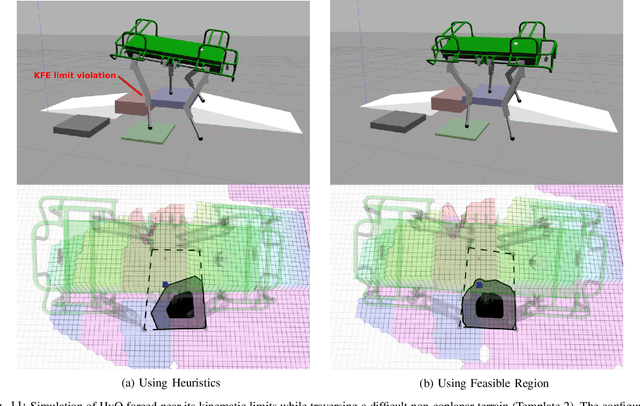
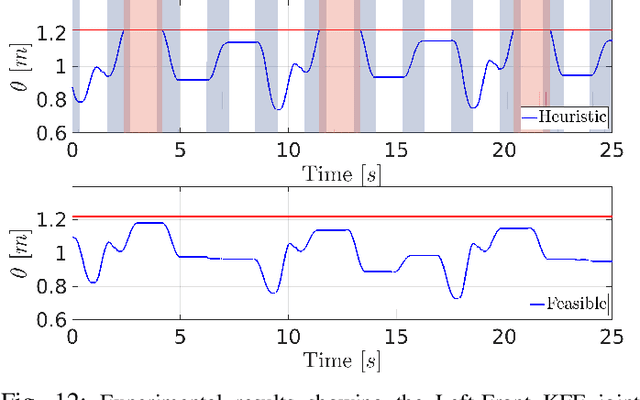
Developing feasible body trajectories for legged systems on arbitrary terrains is a challenging task. Given some contact points, the trajectories for the Center of Mass (CoM) and body orientation, designed to move the robot, must satisfy crucial constraints to maintain balance, and to avoid violating physical actuation and kinematic limits. In this paper, we present a paradigm that allows to design feasible trajectories in an efficient manner. In continuation to our previous work, we extend the notion of the 2D feasible region, where static balance and the satisfaction of actuation limits were guaranteed, whenever the projection of the CoM lies inside the proposed admissible region. We here develop a general formulation of the improved feasible region to guarantee dynamic balance alongside the satisfaction of both actuation and kinematic limits for arbitrary terrains in an efficient manner. To incorporate the feasibility of the kinematic limits, we introduce an algorithm that computes the reachable region of the CoM. Furthermore, we propose an efficient planning strategy that utilizes the improved feasible region to design feasible CoM and body orientation trajectories. Finally, we validate the capabilities of the improved feasible region and the effectiveness of the proposed planning strategy, using simulations and experiments on the HyQ robot and comparing them to a previously developed heuristic approach. Various scenarios and terrains that mimic confined and challenging environments are used for the validation.
Motion Planning for Quadrupedal Locomotion: Coupled Planning, Terrain Mapping and Whole-Body Control
Mar 11, 2020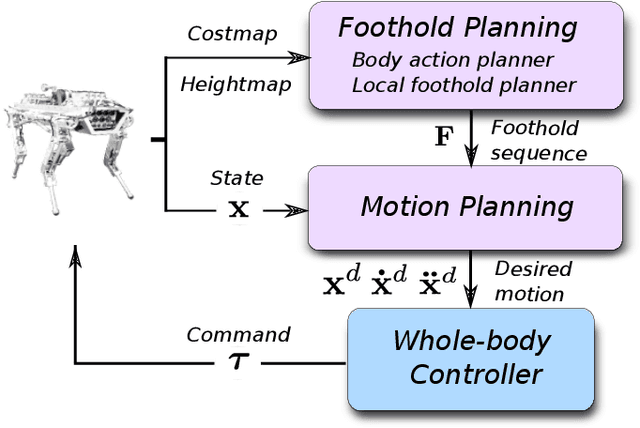
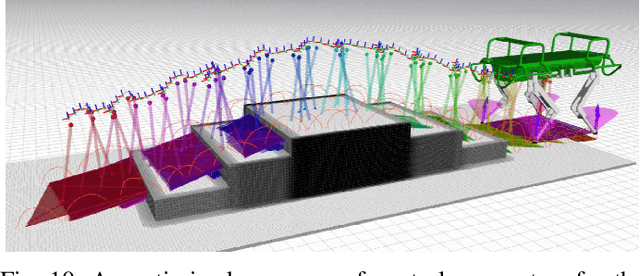
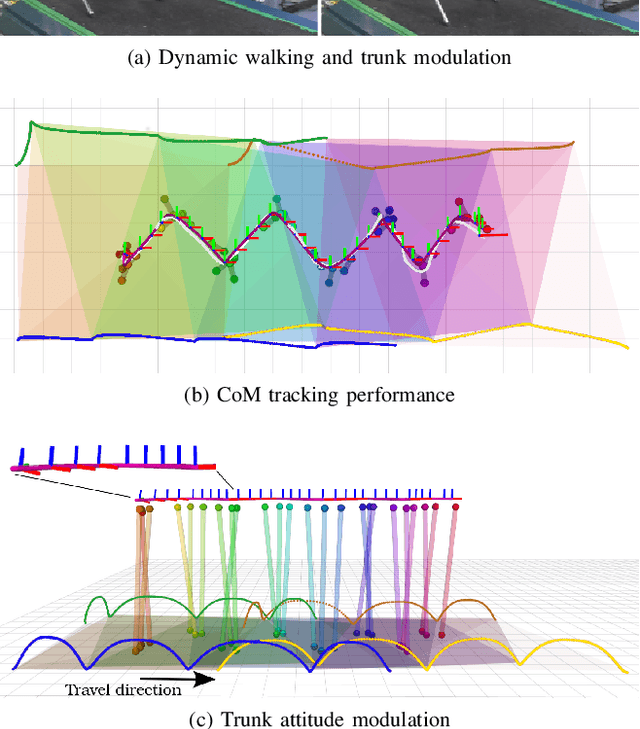
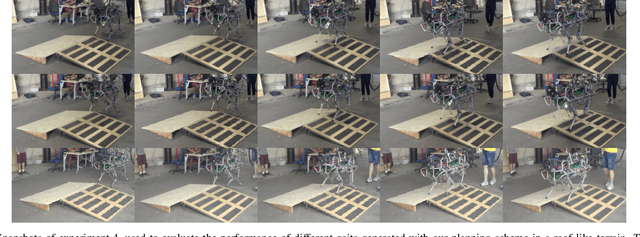
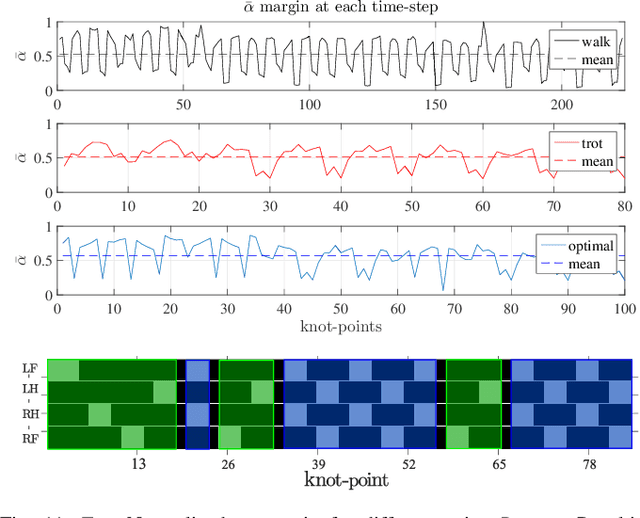
Planning whole-body motions while taking into account the terrain conditions is a challenging problem for legged robots since the terrain model might produce many local minima. Our coupled planning method uses stochastic and derivatives-free search to plan both foothold locations and horizontal motions due to the local minima produced by the terrain model. It jointly optimizes body motion, step duration and foothold selection, and it models the terrain as a cost-map. Due to the novel attitude planning method, the horizontal motion plans can be applied to various terrain conditions. The attitude planner ensures the robot stability by imposing limits to the angular acceleration. Our whole-body controller tracks compliantly trunk motions while avoiding slippage, as well as kinematic and torque limits. Despite the use of a simplified model, which is restricted to flat terrain, our approach shows remarkable capability to deal with a wide range of non-coplanar terrains. The results are validated by experimental trials and comparative evaluations in a series of terrains of progressively increasing complexity.
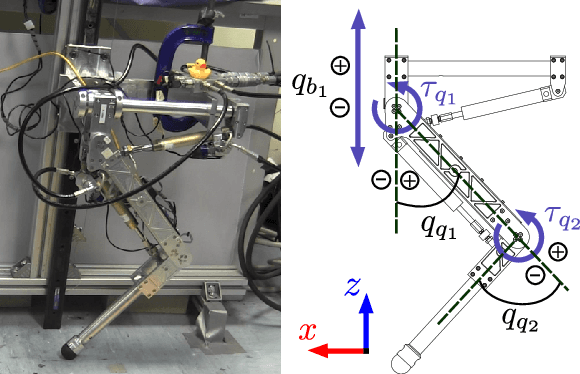
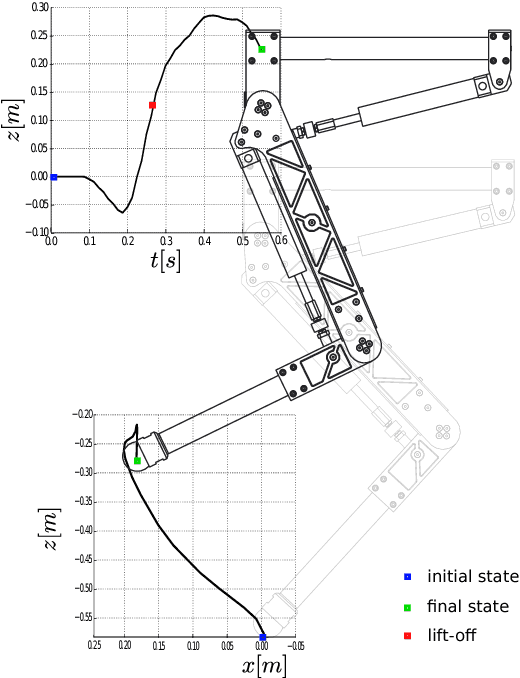
On the Hardware Feasibility of Nonlinear Trajectory Optimization for Legged Locomotion based on a Simplified Dynamics
Oct 15, 2019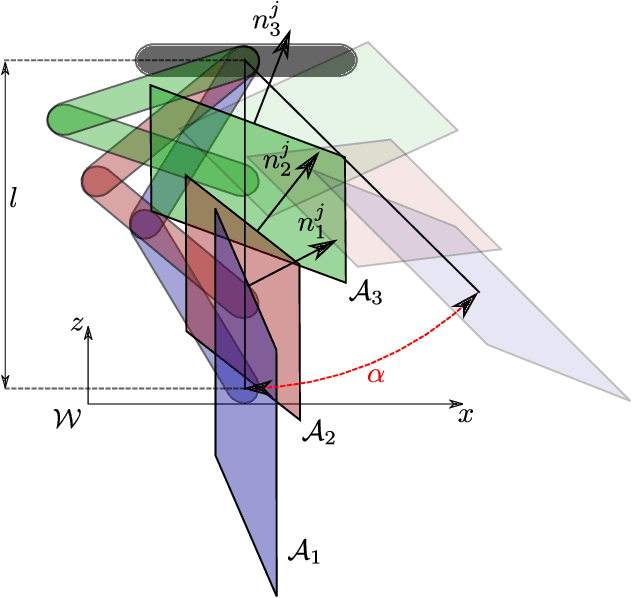
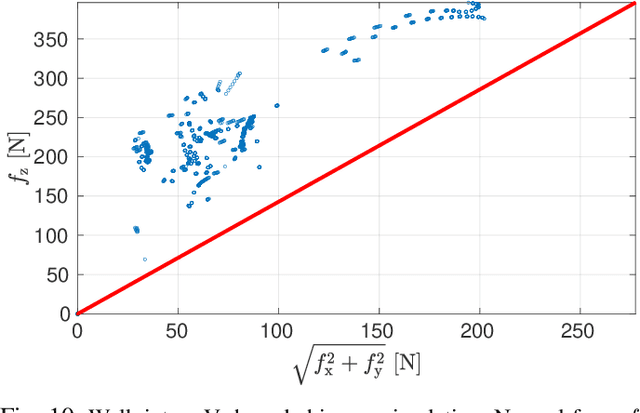
We propose two feasibility constraints to be included in a Single Rigid Body Dynamics-based trajectory optimizer in order to obtain robust motions for quadruped robots in challenging terrain. The former finds an approximate relationship between joint-torque limits and admissible contact forces without requiring the knowledge of the joints' configuration. The latter proposes a model of the leg to guarantee the avoidance of the collision with the environment. Such constraints have been included in a nonlinear non-convex optimization problem. We validate the feasibility of the trajectories both in simulation and on the HyQ robot, including experiments with non flat terrain.
STANCE: Locomotion Adaptation over Soft Terrain
Apr 28, 2019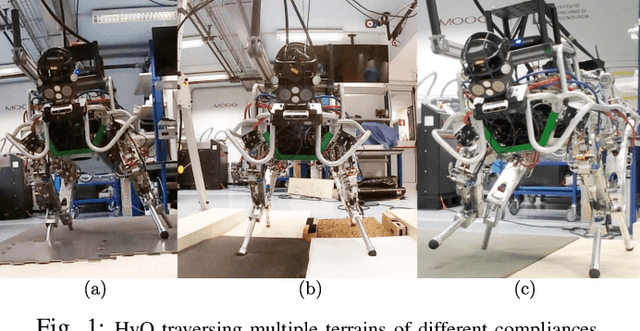
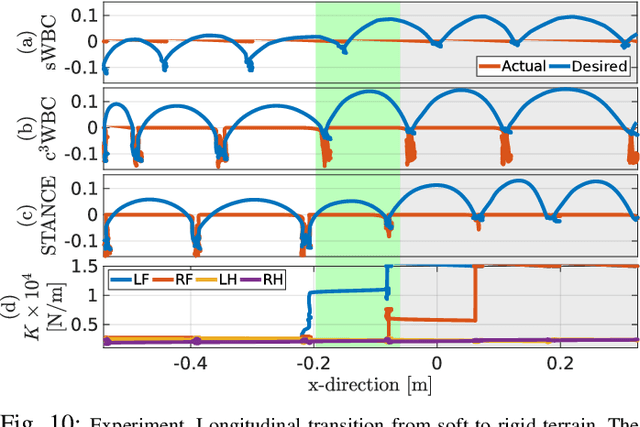
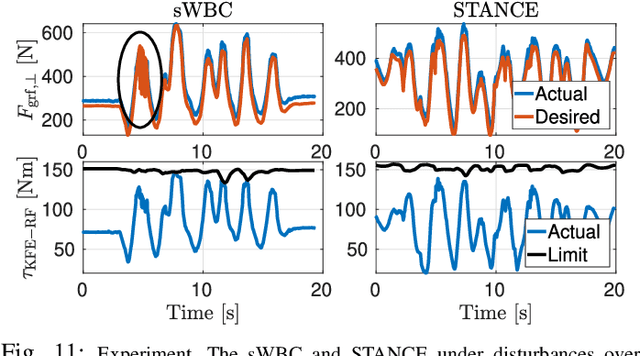
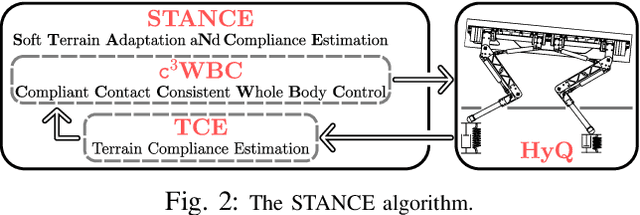
Whole-body Control (WBC) has emerged as an important framework in locomotion control for legged robots. However, most of WBC frameworks fail to generalize beyond rigid terrains. Legged locomotion over soft terrain is difficult due to the presence of unmodeled contact dynamics that WBCs do not account for. This introduces uncertainty in locomotion and affects the stability and performance of the system. In this paper, we propose a novel soft terrain adaptation algorithm called STANCE: Soft Terrain Adaptation and Compliance Estimation. STANCE consists of a WBC that exploits the knowledge of the terrain to generate an optimal solution that is contact consistent and an online terrain compliance estimator that provides the WBC with terrain knowledge. We validated STANCE both in simulation and experiment on the Hydraulically actuated Quadruped (HyQ) robot, and we compared it against the state of the art WBC. We demonstrated the capabilities of STANCE with multiple terrains of different compliances, aggressive maneuvers, different forward velocities, and external disturbances. STANCE allowed HyQ to adapt online to terrains with different compliances (rigid and soft) without pre-tuning. HyQ was able to successfully deal with the transition between different terrains and showed the ability to differentiate between compliances under each foot.
Hierarchical Planning of Dynamic Movements without Scheduled Contact Sequences
Apr 09, 2019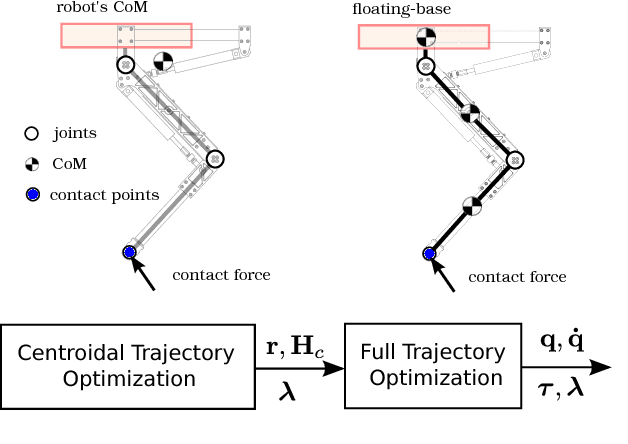
Most animal and human locomotion behaviors for solving complex tasks involve dynamic motions and rich contact interaction. In fact, complex maneuvers need to consider dynamic movement and contact events at the same time. We present a hierarchical trajectory optimization approach for planning dynamic movements with unscheduled contact sequences. We compute whole-body motions that achieve goals that cannot be reached in a kinematic fashion. First, we find a feasible CoM motion according to the centroidal dynamics of the robot. Then, we refine the solution by applying the robot's full-dynamics model, where the feasible CoM trajectory is used as a warm-start point. To accomplish the unscheduled contact behavior, we use complementarity constraints to describe the contact model, i.e. environment geometry and non-sliding active contacts. Both optimization phases are posed as Mathematical Program with Complementarity Constraints (MPCC). Experimental trials demonstrate the performance of our planning approach in a set of challenging tasks.
Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via Mixed-Integer Convex Optimization
Apr 09, 2019
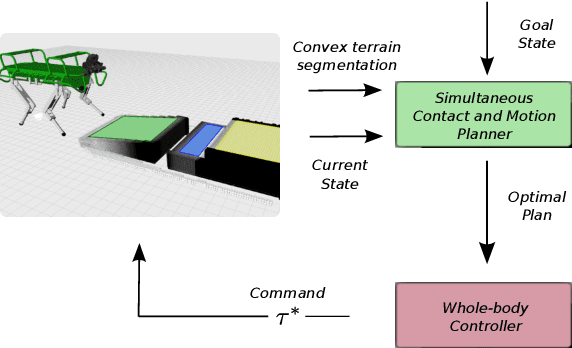
Traditional motion planning approaches for multi-legged locomotion divide the problem into several stages, such as contact search and trajectory generation. However, reasoning about contacts and motions simultaneously is crucial for the generation of complex whole-body behaviors. Currently, coupling theses problems has required either the assumption of a fixed gait sequence and flat terrain condition, or non-convex optimization with intractable computation time. In this paper, we propose a mixed-integer convex formulation to plan simultaneously contact locations, gait transitions and motion, in a computationally efficient fashion. In contrast to previous works, our approach is not limited to flat terrain nor to a pre-specified gait sequence. Instead, we incorporate the friction cone stability margin, approximate the robot's torque limits, and plan the gait using mixed-integer convex constraints. We experimentally validated our approach on the HyQ robot by traversing different challenging terrains, where non-convexity and flat terrain assumptions might lead to sub-optimal or unstable plans. Our method increases the motion generality while keeping a low computation time.
Planning and Execution of Dynamic Whole-Body Locomotion for a Hydraulic Quadruped on Challenging Terrain
Apr 07, 2019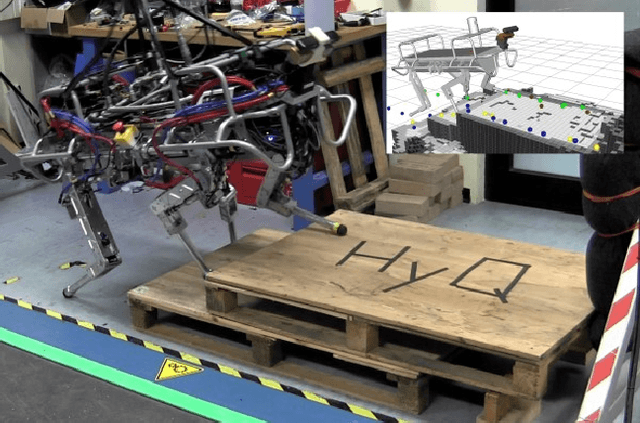
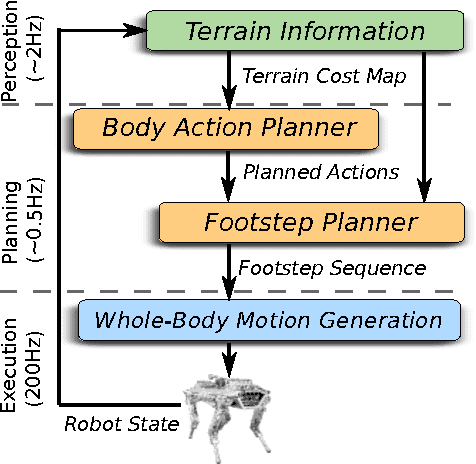
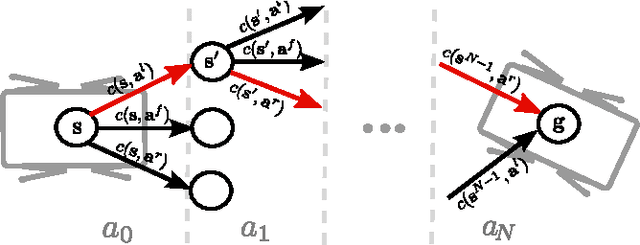
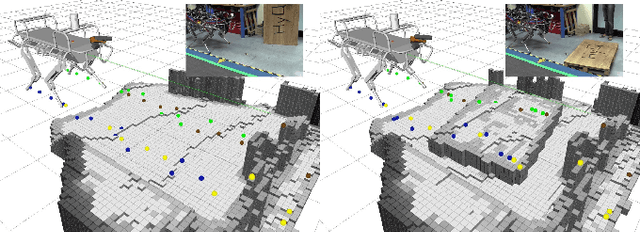
We present a framework for dynamic quadrupedal locomotion over challenging terrain, where the choice of appropriate footholds is crucial for the success of the behaviour. We build a model of the environment on-line and on-board using an efficient occupancy grid representation. We use Any-time-Repairing A* (ARA*) to search over a tree of possible actions, choose a rough body path and select the locally-best footholds accordingly. We run a n-step lookahead optimization of the body trajectory using a dynamic stability metric, the Zero Moment Point (ZMP), that generates natural dynamic whole-body motions. A combination of floating-base inverse dynamics and virtual model control accurately executes the desired motions on an actively compliant system. Experimental trials show that this framework allows us to traverse terrains at nearly 6 times the speed of our previous work, evaluated over the same set of trials.
* 7 pages, IEEE International Conference on Robotics and Automation