 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Human-Robot Co-Dispatch Planning for Petro-Site Surveillance under Varying Criticalities
Feb 08, 2026Securing petroleum infrastructure requires balancing autonomous system efficiency with human judgment for threat escalation, a challenge unaddressed by classical facility location models assuming homogeneous resources. This paper formulates the Human-Robot Co-Dispatch Facility Location Problem (HRCD-FLP), a capacitated facility location variant incorporating tiered infrastructure criticality, human-robot supervision ratio constraints, and minimum utilization requirements. We evaluate command center selection across three technology maturity scenarios. Results show transitioning from conservative (1:3 human-robot supervision) to future autonomous operations (1:10) yields significant cost reduction while maintaining complete critical infrastructure coverage. For small problems, exact methods dominate in both cost and computation time; for larger problems, the proposed heuristic achieves feasible solutions in under 3 minutes with approximately 14% optimality gap where comparison is possible. From systems perspective, our work demonstrate that optimized planning for human-robot teaming is key to achieve both cost-effective and mission-reliable deployments.
Managing Geological Uncertainty in Critical Mineral Supply Chains: A POMDP Approach with Application to U.S. Lithium Resources
Feb 08, 2025



The world is entering an unprecedented period of critical mineral demand, driven by the global transition to renewable energy technologies and electric vehicles. This transition presents unique challenges in mineral resource development, particularly due to geological uncertainty-a key characteristic that traditional supply chain optimization approaches do not adequately address. To tackle this challenge, we propose a novel application of Partially Observable Markov Decision Processes (POMDPs) that optimizes critical mineral sourcing decisions while explicitly accounting for the dynamic nature of geological uncertainty. Through a case study of the U.S. lithium supply chain, we demonstrate that POMDP-based policies achieve superior outcomes compared to traditional approaches, especially when initial reserve estimates are imperfect. Our framework provides quantitative insights for balancing domestic resource development with international supply diversification, offering policymakers a systematic approach to strategic decision-making in critical mineral supply chains.
Discrete-Time Distribution Steering using Monte Carlo Tree Search
Dec 09, 2024



Optimal control problems with state distribution constraints have attracted interest for their expressivity, but solutions rely on linear approximations. We approach the problem of driving the state of a dynamical system in distribution from a sequential decision-making perspective. We formulate the optimal control problem as an appropriate Markov decision process (MDP), where the actions correspond to the state-feedback control policies. We then solve the MDP using Monte Carlo tree search (MCTS). This renders our method suitable for any dynamics model. A key component of our approach is a novel, easy to compute, distance metric in the distribution space that allows our algorithm to guide the distribution of the state. We experimentally test our algorithm under both linear and nonlinear dynamics.
Optimal Control of Mechanical Ventilators with Learned Respiratory Dynamics
Nov 12, 2024Deciding on appropriate mechanical ventilator management strategies significantly impacts the health outcomes for patients with respiratory diseases. Acute Respiratory Distress Syndrome (ARDS) is one such disease that requires careful ventilator operation to be effectively treated. In this work, we frame the management of ventilators for patients with ARDS as a sequential decision making problem using the Markov decision process framework. We implement and compare controllers based on clinical guidelines contained in the ARDSnet protocol, optimal control theory, and learned latent dynamics represented as neural networks. The Pulse Physiology Engine's respiratory dynamics simulator is used to establish a repeatable benchmark, gather simulated data, and quantitatively compare these controllers. We score performance in terms of measured improvement in established ARDS health markers (pertaining to improved respiratory rate, oxygenation, and vital signs). Our results demonstrate that techniques leveraging neural networks and optimal control can automatically discover effective ventilation management strategies without access to explicit ventilator management procedures or guidelines (such as those defined in the ARDSnet protocol).
Importance Sampling-Guided Meta-Training for Intelligent Agents in Highly Interactive Environments
Jul 22, 2024Training intelligent agents to navigate highly interactive environments presents significant challenges. While guided meta reinforcement learning (RL) approach that first trains a guiding policy to train the ego agent has proven effective in improving generalizability across various levels of interaction, the state-of-the-art method tends to be overly sensitive to extreme cases, impairing the agents' performance in the more common scenarios. This study introduces a novel training framework that integrates guided meta RL with importance sampling (IS) to optimize training distributions for navigating highly interactive driving scenarios, such as T-intersections. Unlike traditional methods that may underrepresent critical interactions or overemphasize extreme cases during training, our approach strategically adjusts the training distribution towards more challenging driving behaviors using IS proposal distributions and applies the importance ratio to de-bias the result. By estimating a naturalistic distribution from real-world datasets and employing a mixture model for iterative training refinements, the framework ensures a balanced focus across common and extreme driving scenarios. Experiments conducted with both synthetic dataset and T-intersection scenarios from the InD dataset demonstrate not only accelerated training but also improvement in agent performance under naturalistic conditions, showcasing the efficacy of combining IS with meta RL in training reliable autonomous agents for highly interactive navigation tasks.
Diffusion-Based Failure Sampling for Cyber-Physical Systems
Jun 20, 2024



Validating safety-critical autonomous systems in high-dimensional domains such as robotics presents a significant challenge. Existing black-box approaches based on Markov chain Monte Carlo may require an enormous number of samples, while methods based on importance sampling often rely on simple parametric families that may struggle to represent the distribution over failures. We propose to sample the distribution over failures using a conditional denoising diffusion model, which has shown success in complex high-dimensional problems such as robotic task planning. We iteratively train a diffusion model to produce state trajectories closer to failure. We demonstrate the effectiveness of our approach on high-dimensional robotic validation tasks, improving sample efficiency and mode coverage compared to existing black-box techniques.
Enhancing Visual Perception in Novel Environments via Incremental Data Augmentation Based on Style Transfer
Sep 16, 2023



The deployment of autonomous agents in real-world scenarios is challenged by "unknown unknowns", i.e. novel unexpected environments not encountered during training, such as degraded signs. While existing research focuses on anomaly detection and class imbalance, it often fails to address truly novel scenarios. Our approach enhances visual perception by leveraging the Variational Prototyping Encoder (VPE) to adeptly identify and handle novel inputs, then incrementally augmenting data using neural style transfer to enrich underrepresented data. By comparing models trained solely on original datasets with those trained on a combination of original and augmented datasets, we observed a notable improvement in the performance of the latter. This underscores the critical role of data augmentation in enhancing model robustness. Our findings suggest the potential benefits of incorporating generative models for domain-specific augmentation strategies.
Test Against High-Dimensional Uncertainties: Accelerated Evaluation of Autonomous Vehicles with Deep Importance Sampling
Apr 06, 2022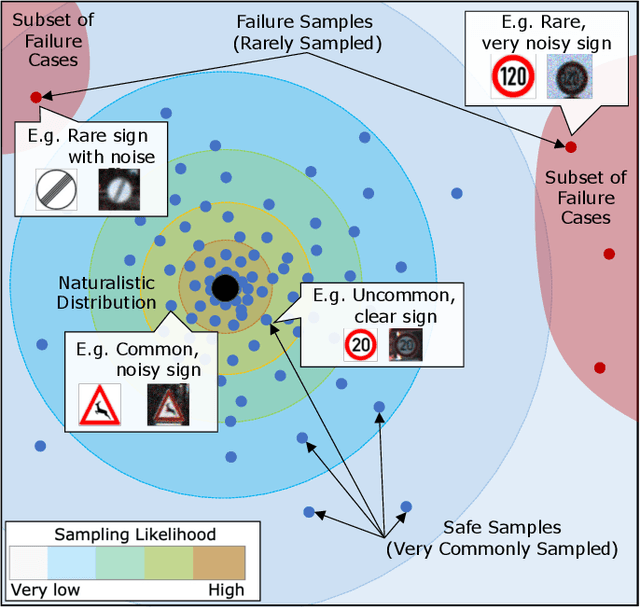


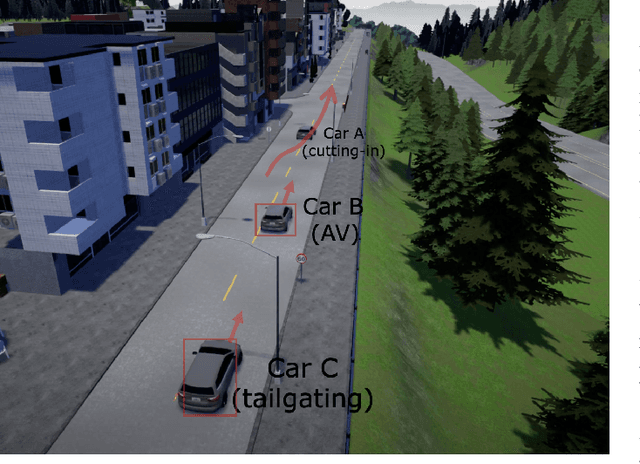
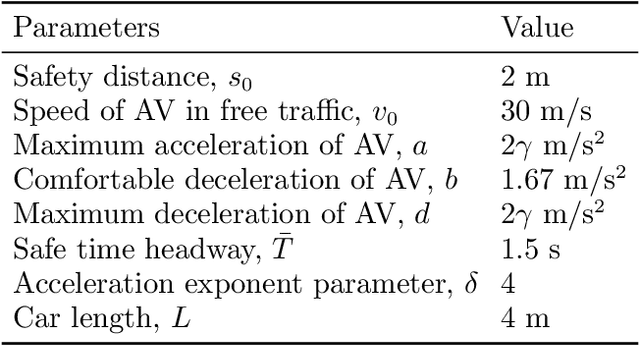
Evaluating the performance of autonomous vehicles (AV) and their complex subsystems to high precision under naturalistic circumstances remains a challenge, especially when failure or dangerous cases are rare. Rarity does not only require an enormous sample size for a naive method to achieve high confidence estimation, but it also causes dangerous underestimation of the true failure rate and it is extremely hard to detect. Meanwhile, the state-of-the-art approach that comes with a correctness guarantee can only compute an upper bound for the failure rate under certain conditions, which could limit its practical uses. In this work, we present Deep Importance Sampling (Deep IS) framework that utilizes a deep neural network to obtain an efficient IS that is on par with the state-of-the-art, capable of reducing the required sample size 43 times smaller than the naive sampling method to achieve 10% relative error and while producing an estimate that is much less conservative. Our high-dimensional experiment estimating the misclassification rate of one of the state-of-the-art traffic sign classifiers further reveals that this efficiency still holds true even when the target is very small, achieving over 600 times efficiency boost. This highlights the potential of Deep IS in providing a precise estimate even against high-dimensional uncertainties.
Certifiable Deep Importance Sampling for Rare-Event Simulation of Black-Box Systems
Nov 03, 2021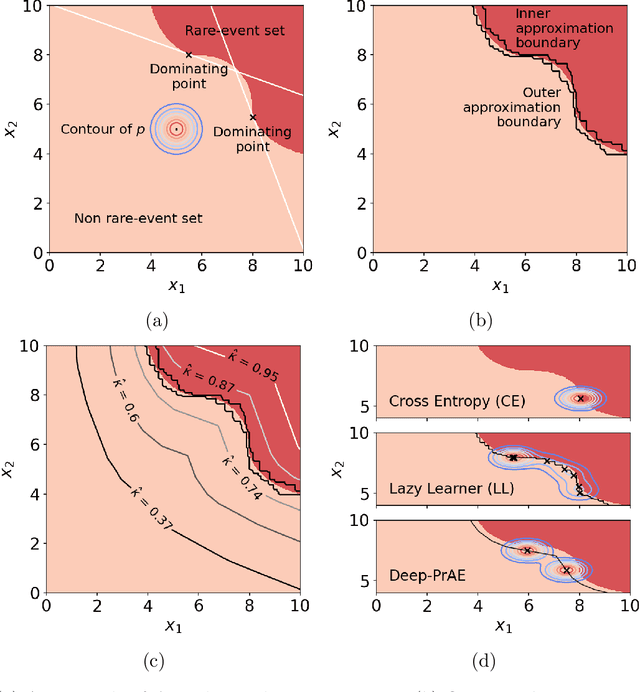
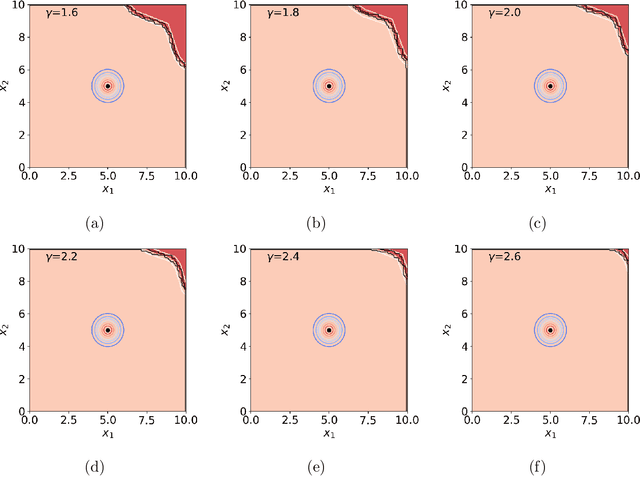
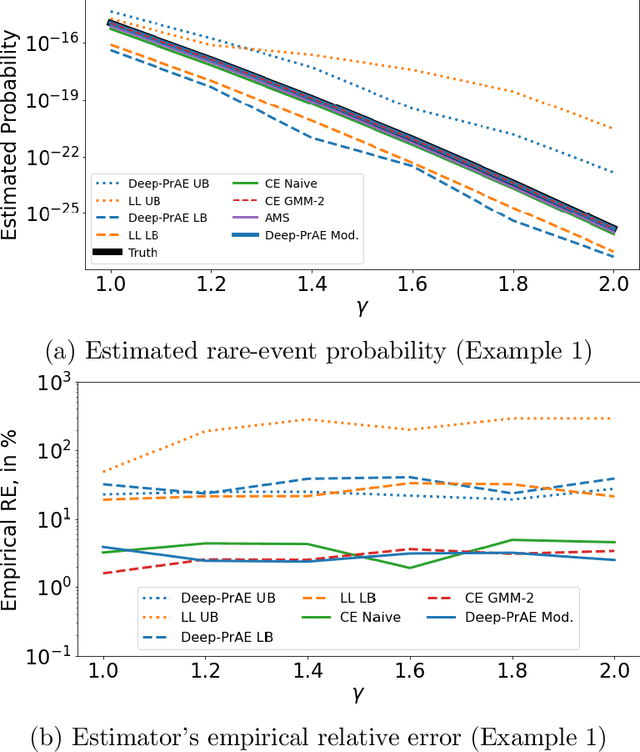
Rare-event simulation techniques, such as importance sampling (IS), constitute powerful tools to speed up challenging estimation of rare catastrophic events. These techniques often leverage the knowledge and analysis on underlying system structures to endow desirable efficiency guarantees. However, black-box problems, especially those arising from recent safety-critical applications of AI-driven physical systems, can fundamentally undermine their efficiency guarantees and lead to dangerous under-estimation without diagnostically detected. We propose a framework called Deep Probabilistic Accelerated Evaluation (Deep-PrAE) to design statistically guaranteed IS, by converting black-box samplers that are versatile but could lack guarantees, into one with what we call a relaxed efficiency certificate that allows accurate estimation of bounds on the rare-event probability. We present the theory of Deep-PrAE that combines the dominating point concept with rare-event set learning via deep neural network classifiers, and demonstrate its effectiveness in numerical examples including the safety-testing of intelligent driving algorithms.
Deep Probabilistic Accelerated Evaluation: A Certifiable Rare-Event Simulation Methodology for Black-Box Autonomy
Jul 01, 2020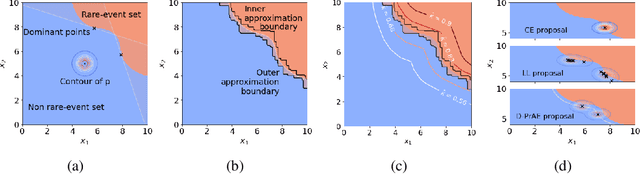
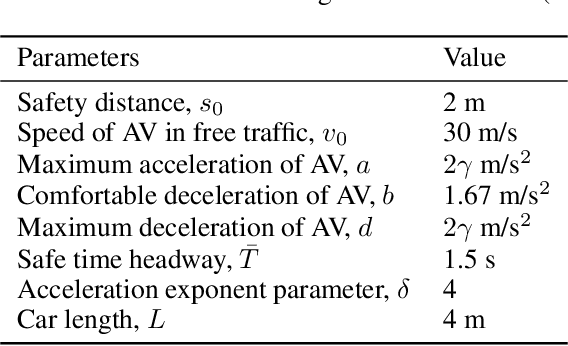
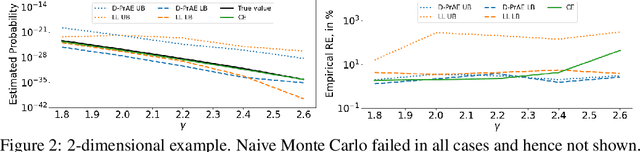
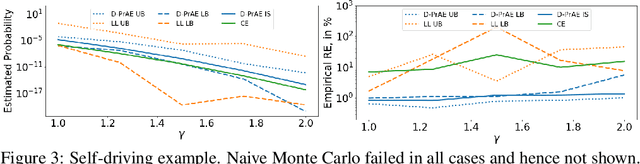
Evaluating the reliability of intelligent physical systems against rare catastrophic events poses a huge testing burden for real-world applications. Simulation provides a useful, if not unique, platform to evaluate the extremal risks of these AI-enabled systems before their deployments. Importance Sampling (IS), while proven to be powerful for rare-event simulation, faces challenges in handling these systems due to their black-box nature that fundamentally undermines its efficiency guarantee. To overcome this challenge, we propose a framework called Deep Probabilistic Accelerated Evaluation (D-PrAE) to design IS, which leverages rare-event-set learning and a new notion of efficiency certificate. D-PrAE combines the dominating point method with deep neural network classifiers to achieve superior estimation efficiency. We present theoretical guarantees and demonstrate the empirical effectiveness of D-PrAE via examples on the safety-testing of self-driving algorithms that are beyond the reach of classical variance reduction techniques.