 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Connectivity Maintenance with Time Delays using Control Barrier Functions
Mar 23, 2021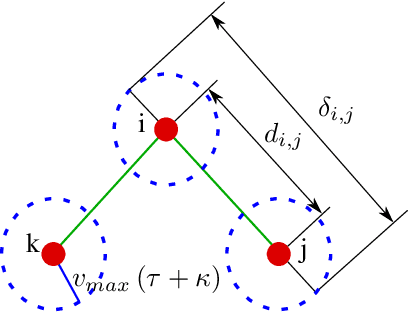
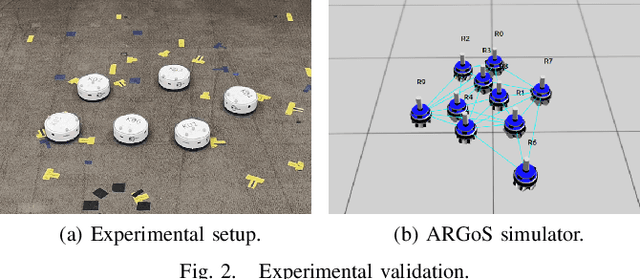

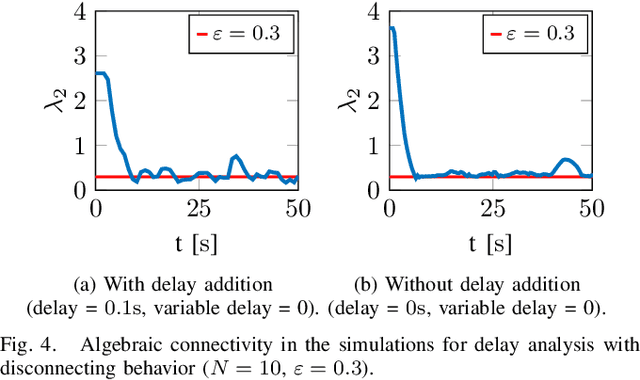
Connectivity maintenance is crucial for the real world deployment of multi-robot systems, as it ultimately allows the robots to communicate, coordinate and perform tasks in a collaborative way. A connectivity maintenance controller must keep the multi-robot system connected independently from the system's mission and in the presence of undesired real world effects such as communication delays, model errors, and computational time delays, among others. In this paper we present the implementation, on a real robotic setup, of a connectivity maintenance control strategy based on Control Barrier Functions. During experimentation, we found that the presence of communication delays has a significant impact on the performance of the controlled system, with respect to the ideal case. We propose a heuristic to counteract the effects of communication delays, and we verify its efficacy both in simulation and with physical robot experiments.
Towards Optimized Distributed Multi-Robot Printing: An Algorithmic Approach
Mar 14, 2021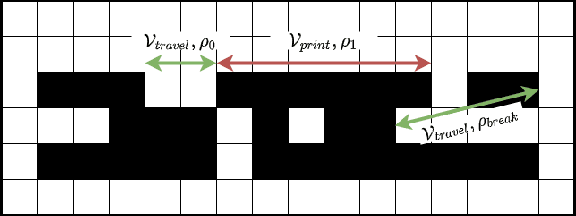
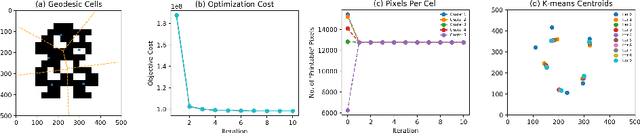
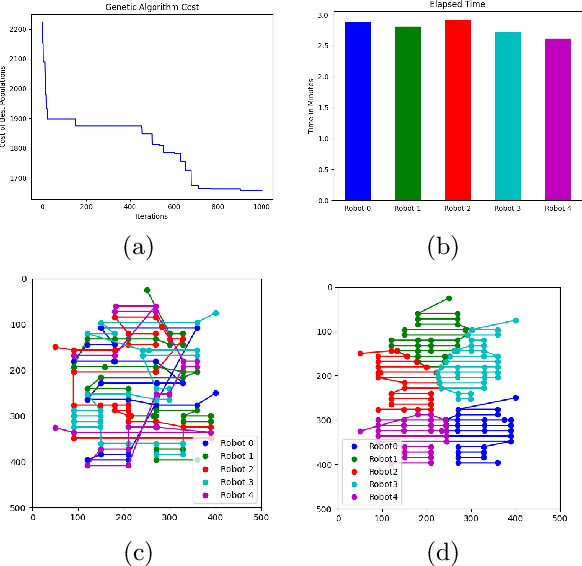
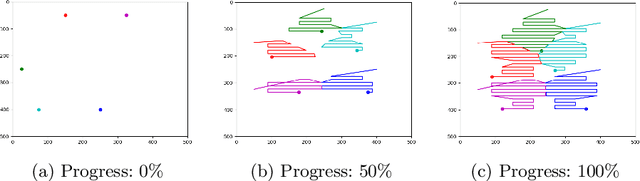
This paper presents a distributed multi-robot printing method which utilizes an optimization approach to decompose and allocate a printing task to a group of mobile robots. The motivation for this problem is to minimize the printing time of the robots by using an appropriate task decomposition algorithm. We present one such algorithm which decomposes an image into rasterized geodesic cells before allocating them to the robots for printing. In addition to this, we also present the design of a numerically controlled holonomic robot capable of spraying ink on smooth surfaces. Further, we use this robot to experimentally verify the results of this paper.
Linear Time-Varying MPC for Nonprehensile Object Manipulation with a Nonholonomic Mobile Robot
Mar 23, 2020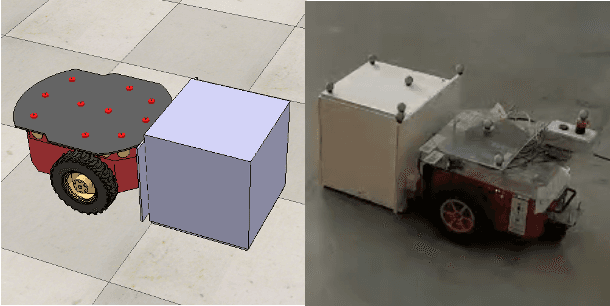
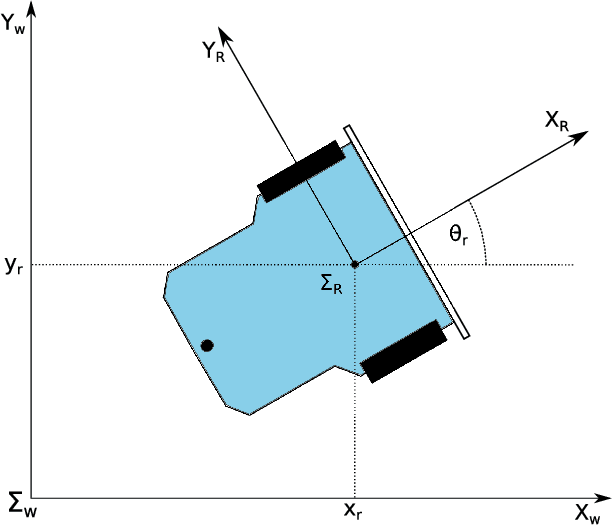
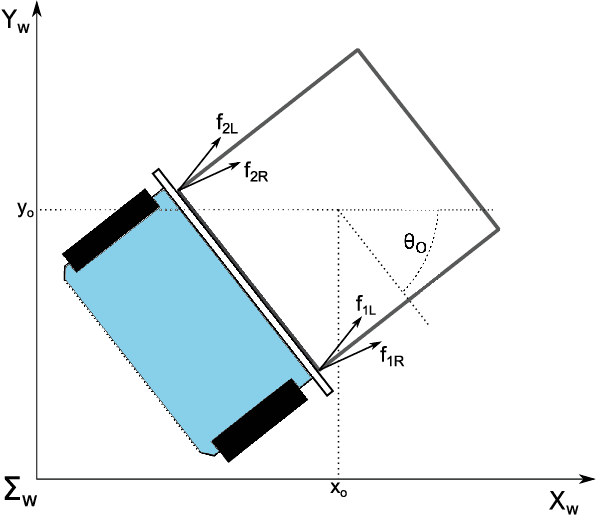
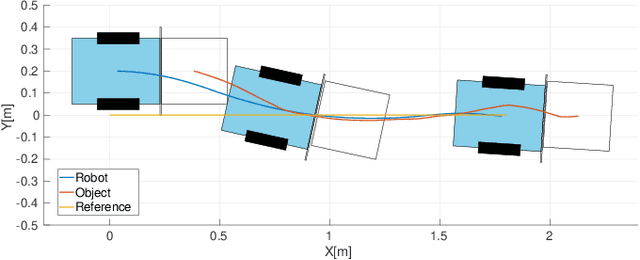
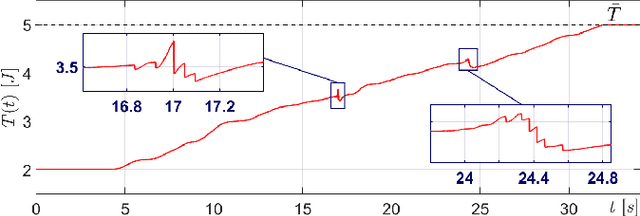
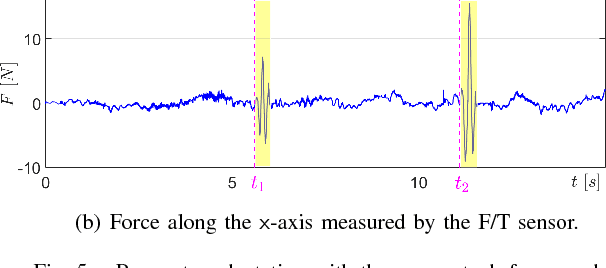
This paper proposes a technique to manipulate an object with a nonholonomic mobile robot by pushing, which is a nonprehensile manipulation motion primitive. Such a primitive involves unilateral constraints associated with the friction between the robot and the manipulated object. Violating this constraint produces the slippage of the object during the manipulation, preventing the correct achievement of the task. A linear time-varying model predictive control is designed to include the unilateral constraint within the control action properly. The approach is verified in a dynamic simulation environment through a Pioneer 3-DX wheeled robot executing the pushing manipulation of a package.
Connectivity Maintenance: Global and Optimized approach through Control Barrier Functions
Mar 23, 2020
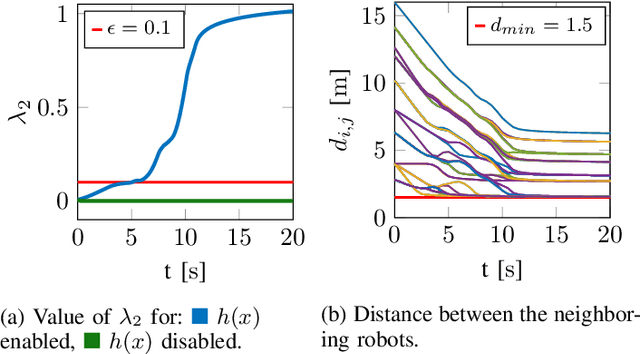
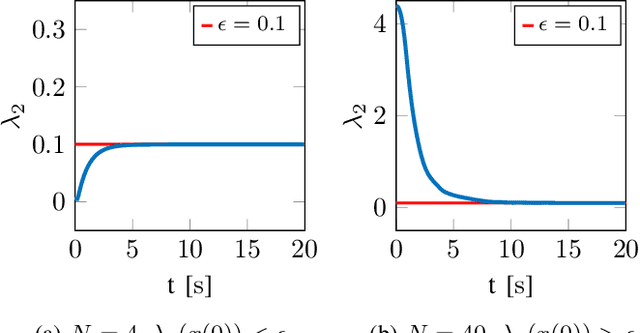
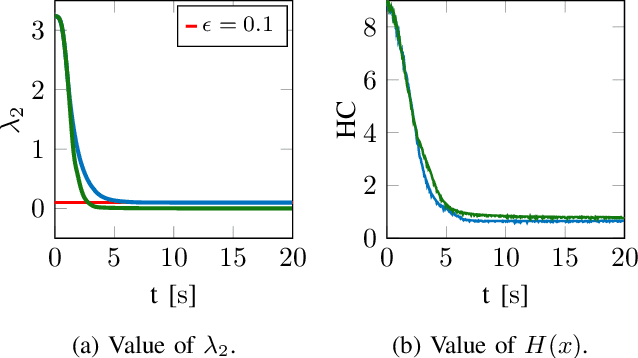
Connectivity maintenance is an essential aspect to consider while controlling a multi-robot system. In general, a multi-robot system should be connected to obtain a certain common objective. Connectivity must be kept regardless of the control strategy or the objective of the multi-robot system. Two main methods exist for connectivity maintenance: keep the initial connections (local connectivity) or allow modifications to the initial connections, but always keeping the overall system connected (global connectivity). In this paper we present a method that allows, at the same time, to maintain global connectivity and to implement the desired control strategy (e.g., consensus, formation control, coverage), all in an optimized fashion. For this purpose, we defined and implemented a Control Barrier Function that can incorporate constraints and objectives. We provide a mathematical proof of the method, and we demonstrate its versatility with simulations of different applications.
Decentralized Connectivity Control in Quadcopters: a Field Study of Communication Performance
Sep 23, 2019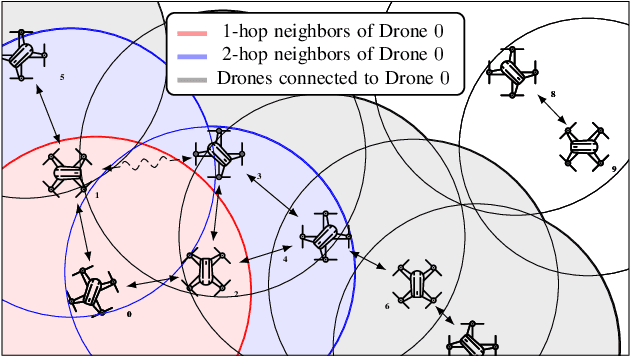
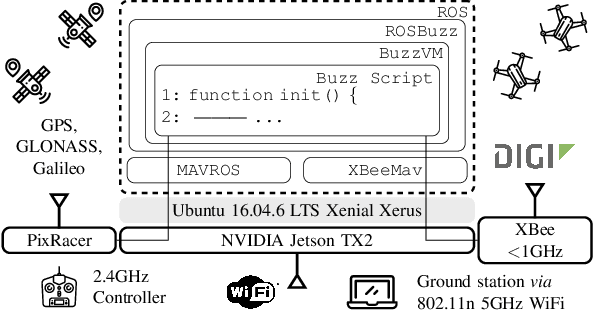
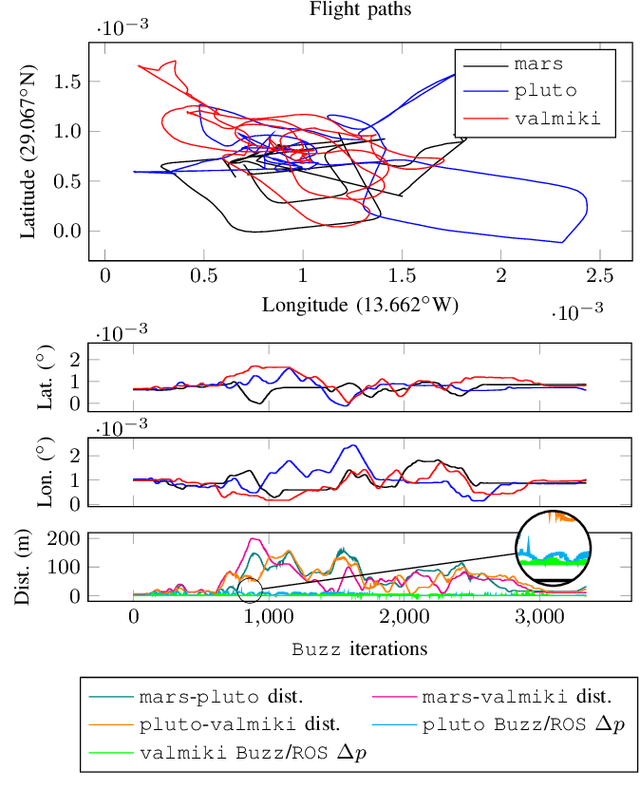
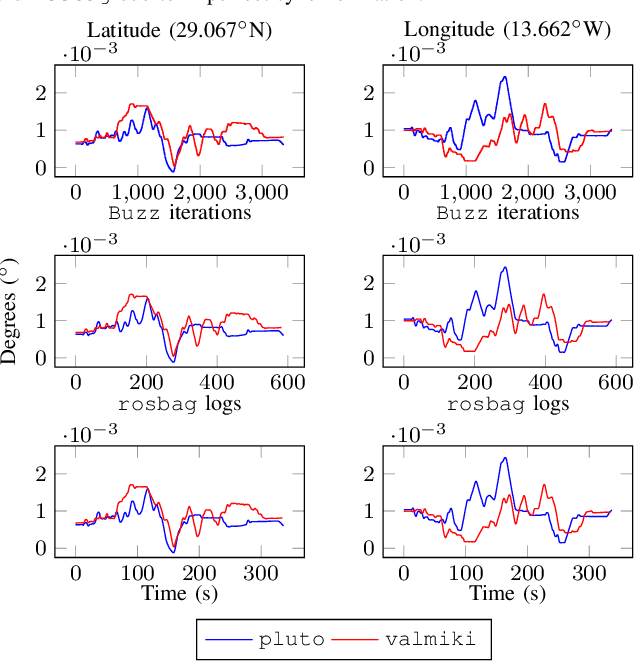
Redundancy and parallelism make decentralized multi-robot systems appealing solutions for the exploration of extreme environments. However, effective cooperation often requires team-wide connectivity and a carefully designed communication strategy. Several recently proposed decentralized connectivity maintenance approaches exploit elegant algebraic results drawn from spectral graph theory. Yet, these proposals are rarely taken beyond simulations or laboratory implementations. In this work, we present two major contributions: (i) we describe the full-stack implementation---from hardware to software---of a decentralized control law for robust connectivity maintenance; and (ii) we assess, in the field, our setup's ability to correctly exchange all the necessary information required to maintain connectivity in a team of quadcopters.
Stop, Think, and Roll: Online Gain Optimization for Resilient Multi-robot Topologies
Sep 19, 2018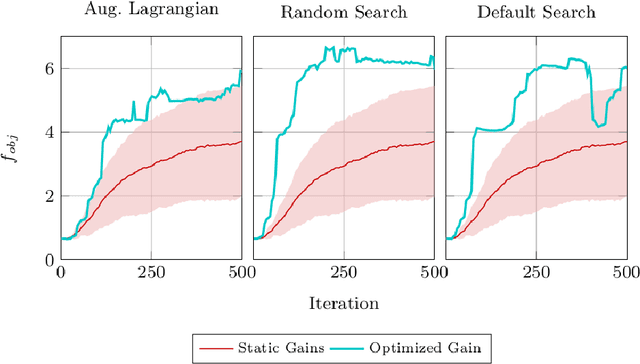
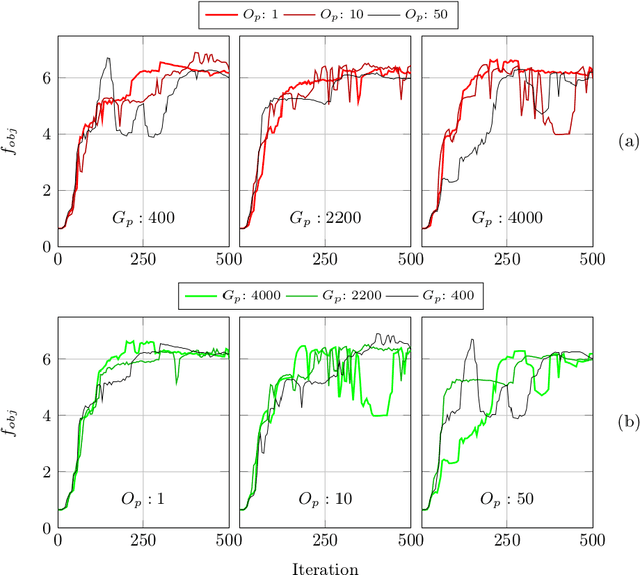

Efficient networking of many-robot systems is considered one of the grand challenges of robotics. In this article, we address the problem of achieving resilient, dynamic interconnection topologies in multi-robot systems. In scenarios in which the overall network topology is constantly changing, we aim at avoiding the onset of single points of failure, particularly situations in which the failure of a single robot causes the loss of connectivity for the overall network. We propose a method based on the combination of multiple control objectives and we introduce an online distributed optimization strategy that computes the optimal choice of control parameters for each robot. This ensures that the connectivity of the multi-robot system is not only preserved but also made more resilient to failures, as the network topology evolves. We provide simulation results, as well as experiments with real robots to validate theoretical findings and demonstrate the portability to robotic hardware.
MATE robots simplifying my work: benefits and socio-ethical implications
Feb 19, 2018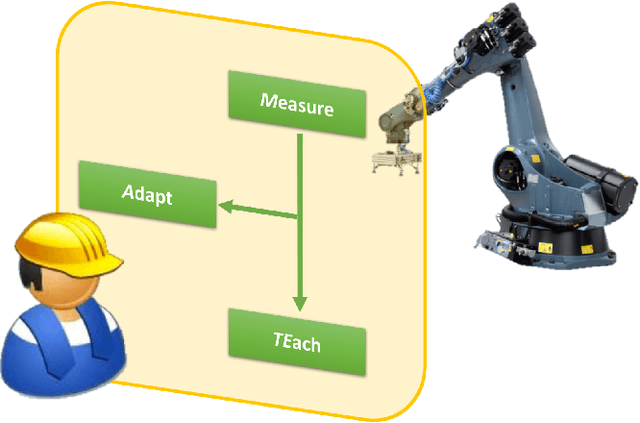
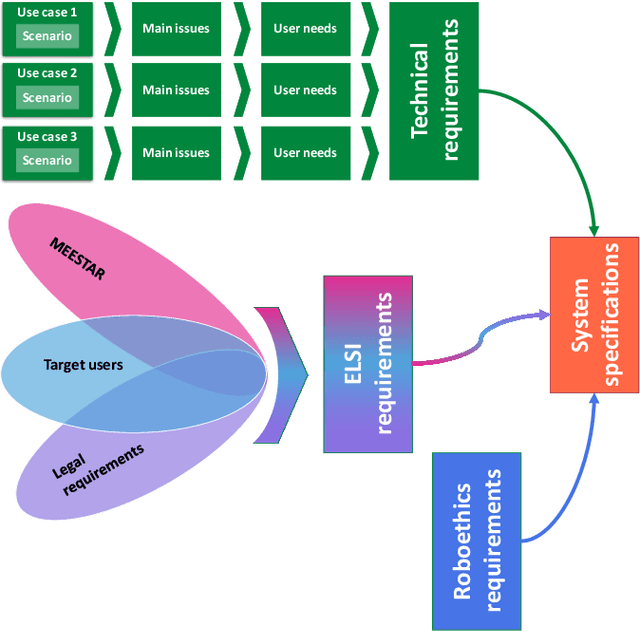
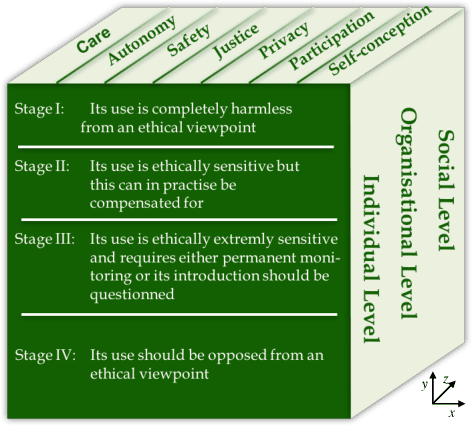
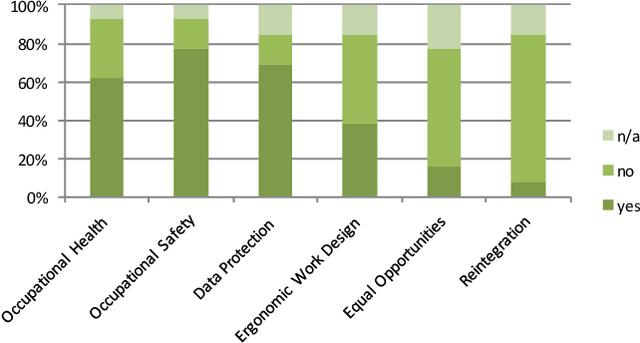
With the increasing complexity of modern industrial automatic and robotic systems, an increasing burden is put on the operators, who are requested to supervise and interact with very complex systems, typically under challenging and stressful conditions. To overcome this issue, it is necessary to adopt a responsible approach based on the anthropocentric design methodology, such that machines adapt to the humans capabilities, and not vice versa. Moving along these lines, in this paper we consider an integrated methodological design approach, which we call MATE, consisting in devising complex automatic or robotic solutions that measure current operator's status, adapting the interaction accordingly, and providing her/him with proper training to improve the interaction and learn lacking skills and expertise. Accordingly, a MATE system is intended to be easily usable for all users, thus meeting the principles of inclusive design. Using such a MATE system gives rise to several ethical and social implications, which are discussed in this paper. Additionally, a discussion about which factors in the organization of companies are critical with respect to the introduction of a MATE system is presented.
Interacting With a Mobile Robot with a Natural Infrastructure-Less Interface
Apr 04, 2017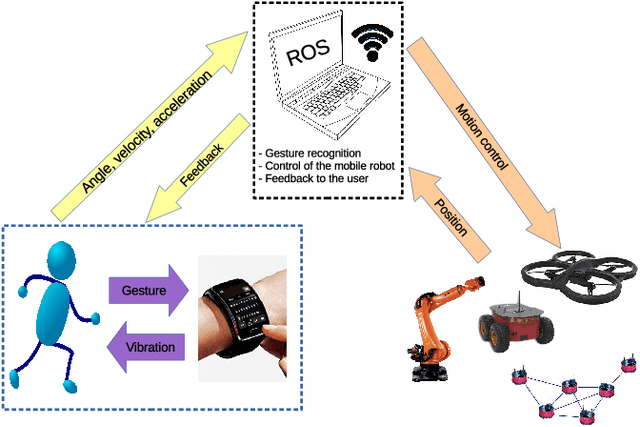
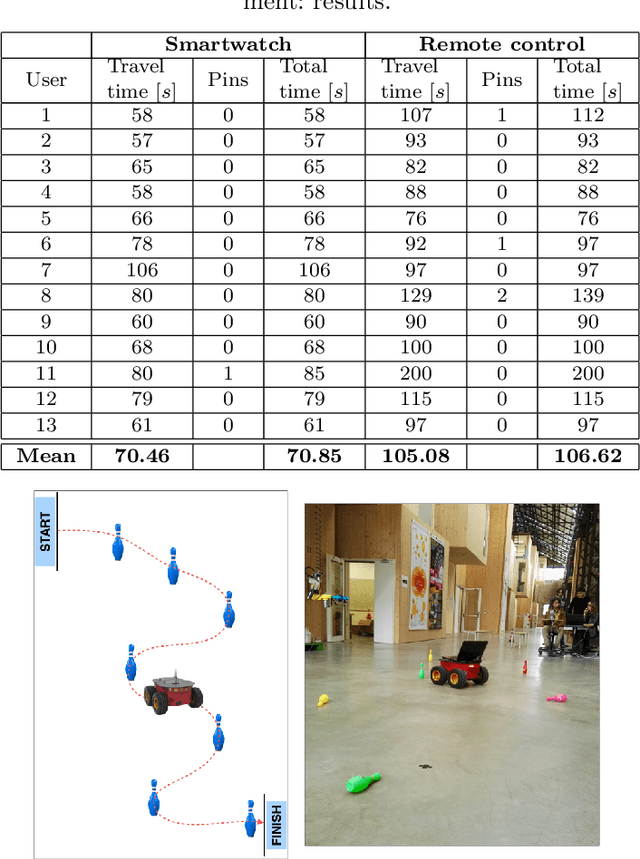
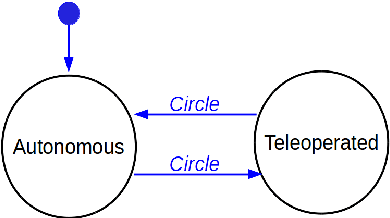
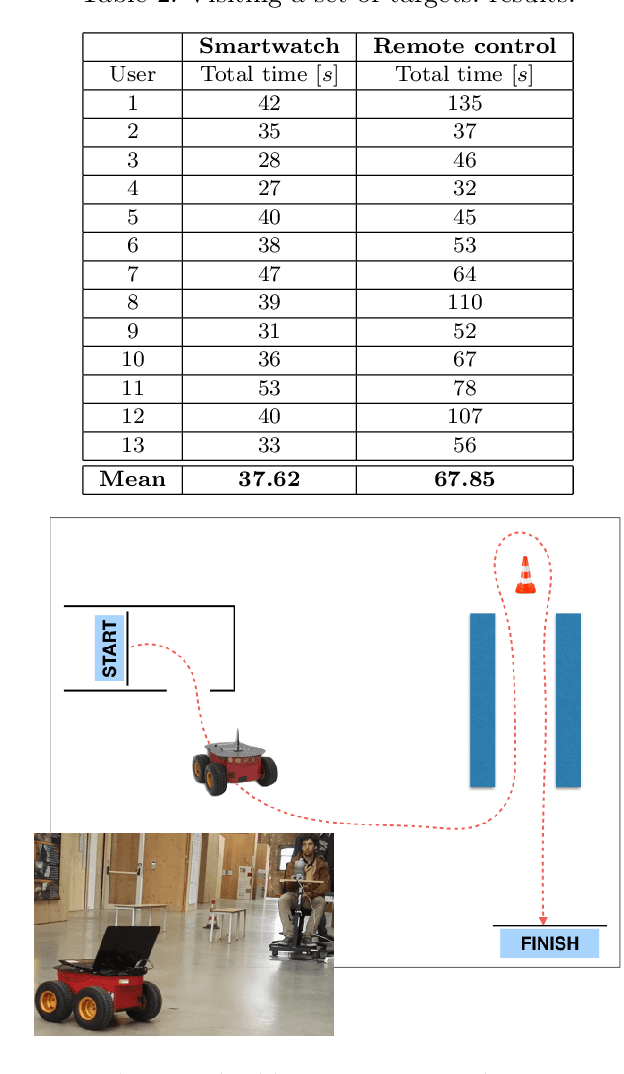
In this paper we introduce a novel approach that enables users to interact with a mobile robot in a natural manner. The proposed interaction system does not require any specific infrastructure or device, but relies on commonly utilized objects while leaving the user's hands free. Specifically, we propose to utilize a smartwatch (or a sensorized wristband) for recognizing the motion of the user's forearm. Measurements of accelerations and angular velocities are exploited to recognize user's gestures and define velocity commands for the robot. The proposed interaction system is evaluated experimentally with different users controlling a mobile robot and compared to the use of a remote control device for the teleoperation of robots. Results show that the usability and effectiveness of the proposed natural interaction system based on the use of a smartwatch provide significant improvement in the human-robot interaction experience.
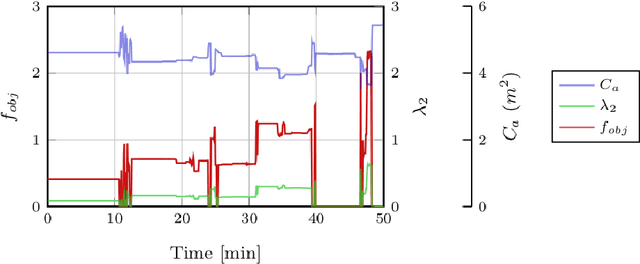
Admittance Control Parameter Adaptation for Physical Human-Robot Interaction
Feb 27, 2017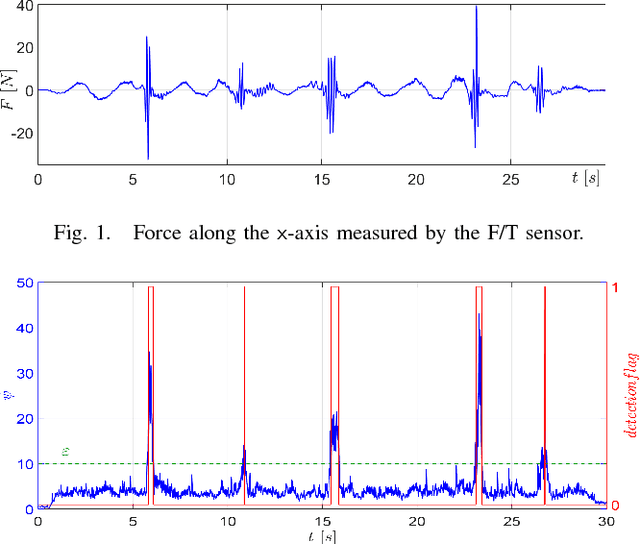
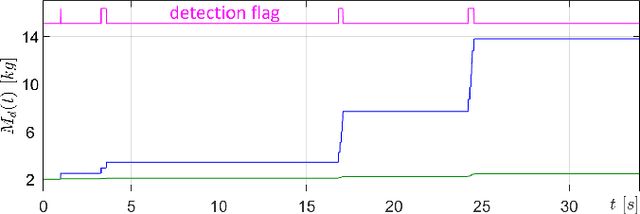
In physical human-robot interaction, the coexistence of robots and humans in the same workspace requires the guarantee of a stable interaction, trying to minimize the effort for the operator. To this aim, the admittance control is widely used and the appropriate selection of the its parameters is crucial, since they affect both the stability and the ability of the robot to interact with the user. In this paper, we present a strategy for detecting deviations from the nominal behavior of an admittance-controlled robot and for adapting the parameters of the controller while guaranteeing the passivity. The proposed methodology is validated on a KUKA LWR 4+.
Achieving the Desired Dynamic Behavior in Multi-Robot Systems Interacting with the Environment
Feb 19, 2017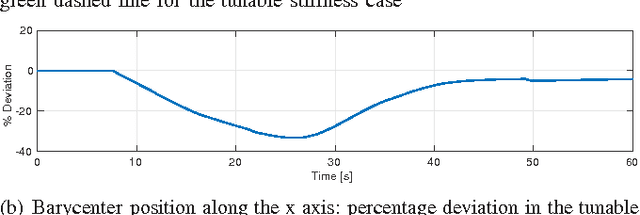
In this paper we consider the problem of controlling the dynamic behavior of a multi-robot system while interacting with the environment. In particular, we propose a general methodology that, by means of locally scaling inter-robot coupling relationships, leads to achieving a desired interactive behavior. The proposed method is shown to guarantee passivity preservation, which ensures a safe interaction. The performance of the proposed methodology is evaluated in simulation, over large-scale multi-robot systems.