 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmooth Total variation Regularization for Interference Detection and Elimination (STRIDE) for MRI
Nov 17, 2025MRI is increasingly desired to function near electronic devices that emit potentially dynamic electromagnetic interference (EMI). To accommodate for this, we propose the STRIDE method, which improves on previous external-sensor-based EMI removal methods by exploiting inherent MR image smoothness in its total variation. STRIDE measures data from both EMI detectors and primary MR imaging coils, transforms this data into the image domain, and for each column of the resulting image array, combines and subtracts data from the EMI detectors in a way that optimizes for total-variation smoothness. Performance was tested on phantom and in-vivo datasets with a 0.5T scanner. STRIDE resulted in visually better EMI removal, higher temporal SNR, larger EMI removal percentage, and lower RMSE than standard implementations. STRIDE is a robust technique that leverages inherent MR image properties to provide improved EMI removal performance over standard algorithms, particularly for time-varying noise sources.
Zoomorphic Gestures for Communicating Cobot States
Feb 22, 2021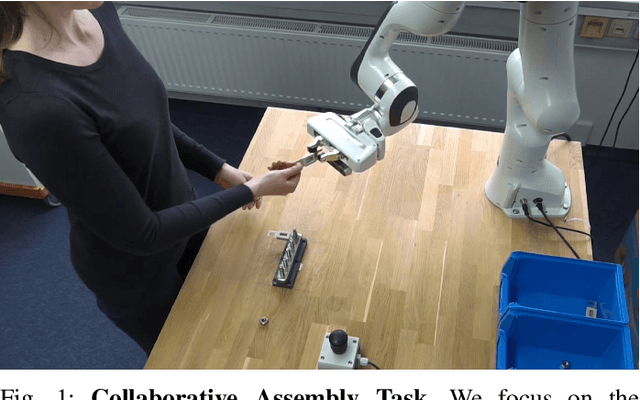
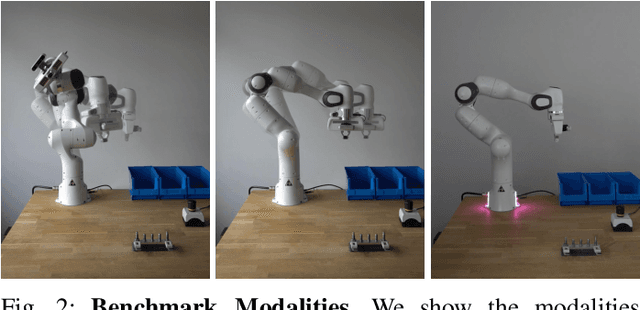
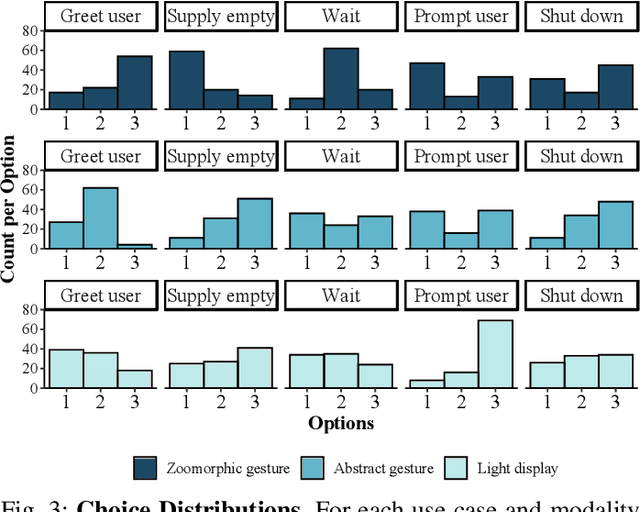
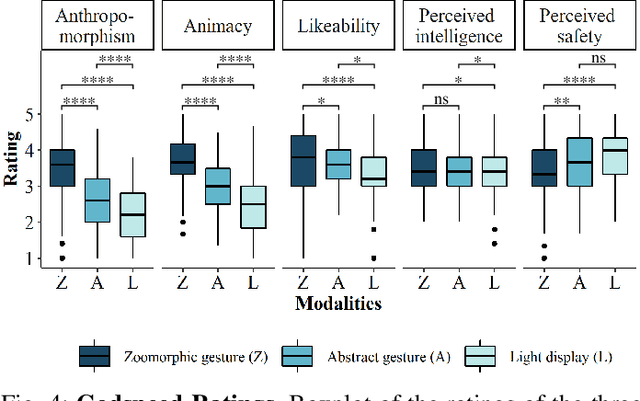
Communicating the robot state is vital to creating an efficient and trustworthy collaboration between humans and collaborative robots (cobots). Standard approaches for Robot-to-human communication face difficulties in industry settings, e.g., because of high noise levels or certain visibility requirements. Therefore, this paper presents zoomorphic gestures based on dog body language as a possible alternative for communicating the state of appearance-constrained cobots. For this purpose, we conduct a visual communication benchmark comparing zoomorphic gestures, abstract gestures, and light displays. We investigate the modalities regarding intuitive understanding, user experience, and user preference. In a first user study (n = 93), we evaluate our proposed design guidelines for all visual modalities. A second user study (n = 214) constituting the benchmark indicates that intuitive understanding and user experience are highest for both gesture-based modalities. Furthermore, zoomorphic gestures are considerably preferred over other modalities. These findings indicate that zoomorphic gestures with their playful nature are especially suitable for novel users and may decrease initial inhibitions.
MATE robots simplifying my work: benefits and socio-ethical implications
Feb 19, 2018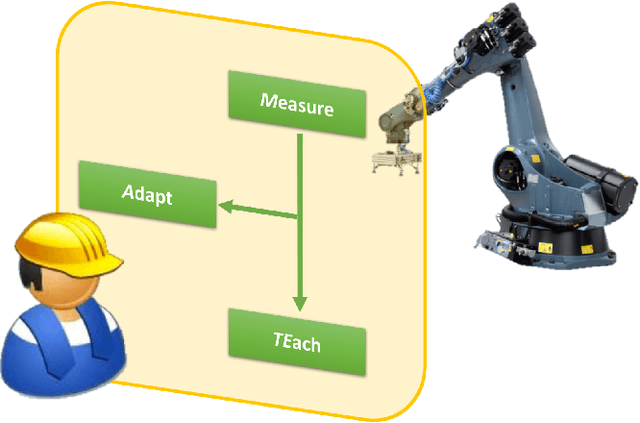
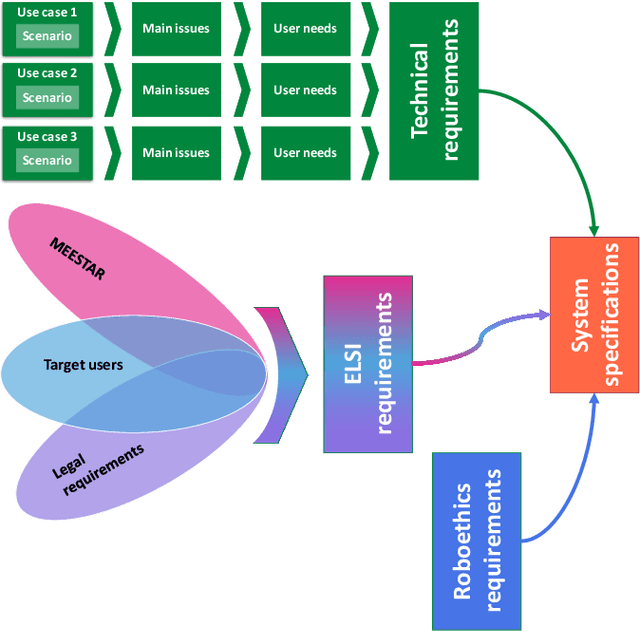
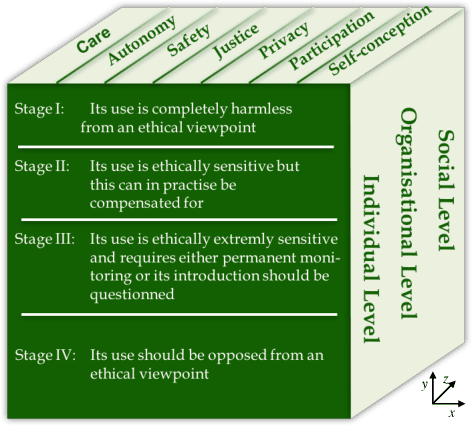
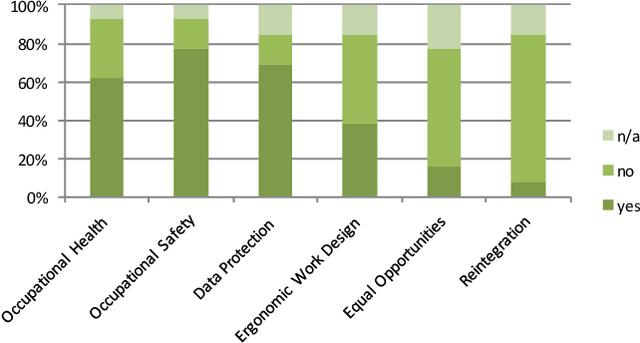
With the increasing complexity of modern industrial automatic and robotic systems, an increasing burden is put on the operators, who are requested to supervise and interact with very complex systems, typically under challenging and stressful conditions. To overcome this issue, it is necessary to adopt a responsible approach based on the anthropocentric design methodology, such that machines adapt to the humans capabilities, and not vice versa. Moving along these lines, in this paper we consider an integrated methodological design approach, which we call MATE, consisting in devising complex automatic or robotic solutions that measure current operator's status, adapting the interaction accordingly, and providing her/him with proper training to improve the interaction and learn lacking skills and expertise. Accordingly, a MATE system is intended to be easily usable for all users, thus meeting the principles of inclusive design. Using such a MATE system gives rise to several ethical and social implications, which are discussed in this paper. Additionally, a discussion about which factors in the organization of companies are critical with respect to the introduction of a MATE system is presented.