 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Bandit Learning through Heterogeneous Action Erasure Channels
Dec 21, 2023



Multi-Armed Bandit (MAB) systems are witnessing an upswing in applications within multi-agent distributed environments, leading to the advancement of collaborative MAB algorithms. In such settings, communication between agents executing actions and the primary learner making decisions can hinder the learning process. A prevalent challenge in distributed learning is action erasure, often induced by communication delays and/or channel noise. This results in agents possibly not receiving the intended action from the learner, subsequently leading to misguided feedback. In this paper, we introduce novel algorithms that enable learners to interact concurrently with distributed agents across heterogeneous action erasure channels with different action erasure probabilities. We illustrate that, in contrast to existing bandit algorithms, which experience linear regret, our algorithms assure sub-linear regret guarantees. Our proposed solutions are founded on a meticulously crafted repetition protocol and scheduling of learning across heterogeneous channels. To our knowledge, these are the first algorithms capable of effectively learning through heterogeneous action erasure channels. We substantiate the superior performance of our algorithm through numerical experiments, emphasizing their practical significance in addressing issues related to communication constraints and delays in multi-agent environments.
Horizon-Free and Instance-Dependent Regret Bounds for Reinforcement Learning with General Function Approximation
Dec 07, 2023



To tackle long planning horizon problems in reinforcement learning with general function approximation, we propose the first algorithm, termed as UCRL-WVTR, that achieves both \emph{horizon-free} and \emph{instance-dependent}, since it eliminates the polynomial dependency on the planning horizon. The derived regret bound is deemed \emph{sharp}, as it matches the minimax lower bound when specialized to linear mixture MDPs up to logarithmic factors. Furthermore, UCRL-WVTR is \emph{computationally efficient} with access to a regression oracle. The achievement of such a horizon-free, instance-dependent, and sharp regret bound hinges upon (i) novel algorithm designs: weighted value-targeted regression and a high-order moment estimator in the context of general function approximation; and (ii) fine-grained analyses: a novel concentration bound of weighted non-linear least squares and a refined analysis which leads to the tight instance-dependent bound. We also conduct comprehensive experiments to corroborate our theoretical findings.
Adaptive Liquidity Provision in Uniswap V3 with Deep Reinforcement Learning
Sep 18, 2023



Decentralized exchanges (DEXs) are a cornerstone of decentralized finance (DeFi), allowing users to trade cryptocurrencies without the need for third-party authorization. Investors are incentivized to deposit assets into liquidity pools, against which users can trade directly, while paying fees to liquidity providers (LPs). However, a number of unresolved issues related to capital efficiency and market risk hinder DeFi's further development. Uniswap V3, a leading and groundbreaking DEX project, addresses capital efficiency by enabling LPs to concentrate their liquidity within specific price ranges for deposited assets. Nevertheless, this approach exacerbates market risk, as LPs earn trading fees only when asset prices are within these predetermined brackets. To mitigate this issue, this paper introduces a deep reinforcement learning (DRL) solution designed to adaptively adjust these price ranges, maximizing profits and mitigating market risks. Our approach also neutralizes price-change risks by hedging the liquidity position through a rebalancing portfolio in a centralized futures exchange. The DRL policy aims to optimize trading fees earned by LPs against associated costs, such as gas fees and hedging expenses, which is referred to as loss-versus-rebalancing (LVR). Using simulations with a profit-and-loss (PnL) benchmark, our method demonstrates superior performance in ETH/USDC and ETH/USDT pools compared to existing baselines. We believe that this strategy not only offers investors a valuable asset management tool but also introduces a new incentive mechanism for DEX designers.
Scaling Distributed Multi-task Reinforcement Learning with Experience Sharing
Jul 11, 2023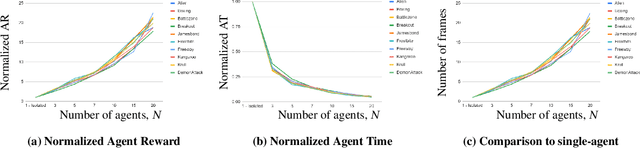
Recently, DARPA launched the ShELL program, which aims to explore how experience sharing can benefit distributed lifelong learning agents in adapting to new challenges. In this paper, we address this issue by conducting both theoretical and empirical research on distributed multi-task reinforcement learning (RL), where a group of $N$ agents collaboratively solves $M$ tasks without prior knowledge of their identities. We approach the problem by formulating it as linearly parameterized contextual Markov decision processes (MDPs), where each task is represented by a context that specifies the transition dynamics and rewards. To tackle this problem, we propose an algorithm called DistMT-LSVI. First, the agents identify the tasks, and then they exchange information through a central server to derive $\epsilon$-optimal policies for the tasks. Our research demonstrates that to achieve $\epsilon$-optimal policies for all $M$ tasks, a single agent using DistMT-LSVI needs to run a total number of episodes that is at most $\tilde{\mathcal{O}}({d^3H^6(\epsilon^{-2}+c_{\rm sep}^{-2})}\cdot M/N)$, where $c_{\rm sep}>0$ is a constant representing task separability, $H$ is the horizon of each episode, and $d$ is the feature dimension of the dynamics and rewards. Notably, DistMT-LSVI improves the sample complexity of non-distributed settings by a factor of $1/N$, as each agent independently learns $\epsilon$-optimal policies for all $M$ tasks using $\tilde{\mathcal{O}}(d^3H^6M\epsilon^{-2})$ episodes. Additionally, we provide numerical experiments conducted on OpenAI Gym Atari environments that validate our theoretical findings.
Tackling Heavy-Tailed Rewards in Reinforcement Learning with Function Approximation: Minimax Optimal and Instance-Dependent Regret Bounds
Jun 12, 2023While numerous works have focused on devising efficient algorithms for reinforcement learning (RL) with uniformly bounded rewards, it remains an open question whether sample or time-efficient algorithms for RL with large state-action space exist when the rewards are \emph{heavy-tailed}, i.e., with only finite $(1+\epsilon)$-th moments for some $\epsilon\in(0,1]$. In this work, we address the challenge of such rewards in RL with linear function approximation. We first design an algorithm, \textsc{Heavy-OFUL}, for heavy-tailed linear bandits, achieving an \emph{instance-dependent} $T$-round regret of $\tilde{O}\big(d T^{\frac{1-\epsilon}{2(1+\epsilon)}} \sqrt{\sum_{t=1}^T \nu_t^2} + d T^{\frac{1-\epsilon}{2(1+\epsilon)}}\big)$, the \emph{first} of this kind. Here, $d$ is the feature dimension, and $\nu_t^{1+\epsilon}$ is the $(1+\epsilon)$-th central moment of the reward at the $t$-th round. We further show the above bound is minimax optimal when applied to the worst-case instances in stochastic and deterministic linear bandits. We then extend this algorithm to the RL settings with linear function approximation. Our algorithm, termed as \textsc{Heavy-LSVI-UCB}, achieves the \emph{first} computationally efficient \emph{instance-dependent} $K$-episode regret of $\tilde{O}(d \sqrt{H \mathcal{U}^*} K^\frac{1}{1+\epsilon} + d \sqrt{H \mathcal{V}^* K})$. Here, $H$ is length of the episode, and $\mathcal{U}^*, \mathcal{V}^*$ are instance-dependent quantities scaling with the central moment of reward and value functions, respectively. We also provide a matching minimax lower bound $\Omega(d H K^{\frac{1}{1+\epsilon}} + d \sqrt{H^3 K})$ to demonstrate the optimality of our algorithm in the worst case. Our result is achieved via a novel robust self-normalized concentration inequality that may be of independent interest in handling heavy-tailed noise in general online regression problems.
MetaVL: Transferring In-Context Learning Ability From Language Models to Vision-Language Models
Jun 02, 2023



Large-scale language models have shown the ability to adapt to a new task via conditioning on a few demonstrations (i.e., in-context learning). However, in the vision-language domain, most large-scale pre-trained vision-language (VL) models do not possess the ability to conduct in-context learning. How can we enable in-context learning for VL models? In this paper, we study an interesting hypothesis: can we transfer the in-context learning ability from the language domain to VL domain? Specifically, we first meta-trains a language model to perform in-context learning on NLP tasks (as in MetaICL); then we transfer this model to perform VL tasks by attaching a visual encoder. Our experiments suggest that indeed in-context learning ability can be transferred cross modalities: our model considerably improves the in-context learning capability on VL tasks and can even compensate for the size of the model significantly. On VQA, OK-VQA, and GQA, our method could outperform the baseline model while having 20 times fewer parameters.
Replicability in Reinforcement Learning
May 31, 2023


We initiate the mathematical study of replicability as an algorithmic property in the context of reinforcement learning (RL). We focus on the fundamental setting of discounted tabular MDPs with access to a generative model. Inspired by Impagliazzo et al. [2022], we say that an RL algorithm is replicable if, with high probability, it outputs the exact same policy after two executions on i.i.d. samples drawn from the generator when its internal randomness is the same. We first provide an efficient $\rho$-replicable algorithm for $(\varepsilon, \delta)$-optimal policy estimation with sample and time complexity $\widetilde O\left(\frac{N^3\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$, where $N$ is the number of state-action pairs. Next, for the subclass of deterministic algorithms, we provide a lower bound of order $\Omega\left(\frac{N^3}{(1-\gamma)^3\cdot\varepsilon^2\cdot\rho^2}\right)$. Then, we study a relaxed version of replicability proposed by Kalavasis et al. [2023] called TV indistinguishability. We design a computationally efficient TV indistinguishable algorithm for policy estimation whose sample complexity is $\widetilde O\left(\frac{N^2\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$. At the cost of $\exp(N)$ running time, we transform these TV indistinguishable algorithms to $\rho$-replicable ones without increasing their sample complexity. Finally, we introduce the notion of approximate-replicability where we only require that two outputted policies are close under an appropriate statistical divergence (e.g., Renyi) and show an improved sample complexity of $\widetilde O\left(\frac{N\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$.
Provably Feedback-Efficient Reinforcement Learning via Active Reward Learning
Apr 18, 2023An appropriate reward function is of paramount importance in specifying a task in reinforcement learning (RL). Yet, it is known to be extremely challenging in practice to design a correct reward function for even simple tasks. Human-in-the-loop (HiL) RL allows humans to communicate complex goals to the RL agent by providing various types of feedback. However, despite achieving great empirical successes, HiL RL usually requires too much feedback from a human teacher and also suffers from insufficient theoretical understanding. In this paper, we focus on addressing this issue from a theoretical perspective, aiming to provide provably feedback-efficient algorithmic frameworks that take human-in-the-loop to specify rewards of given tasks. We provide an active-learning-based RL algorithm that first explores the environment without specifying a reward function and then asks a human teacher for only a few queries about the rewards of a task at some state-action pairs. After that, the algorithm guarantees to provide a nearly optimal policy for the task with high probability. We show that, even with the presence of random noise in the feedback, the algorithm only takes $\widetilde{O}(H{{\dim_{R}^2}})$ queries on the reward function to provide an $\epsilon$-optimal policy for any $\epsilon > 0$. Here $H$ is the horizon of the RL environment, and $\dim_{R}$ specifies the complexity of the function class representing the reward function. In contrast, standard RL algorithms require to query the reward function for at least $\Omega(\operatorname{poly}(d, 1/\epsilon))$ state-action pairs where $d$ depends on the complexity of the environmental transition.
Does Sparsity Help in Learning Misspecified Linear Bandits?
Mar 29, 2023Recently, the study of linear misspecified bandits has generated intriguing implications of the hardness of learning in bandits and reinforcement learning (RL). In particular, Du et al. (2020) show that even if a learner is given linear features in $\mathbb{R}^d$ that approximate the rewards in a bandit or RL with a uniform error of $\varepsilon$, searching for an $O(\varepsilon)$-optimal action requires pulling at least $\Omega(\exp(d))$ queries. Furthermore, Lattimore et al. (2020) show that a degraded $O(\varepsilon\sqrt{d})$-optimal solution can be learned within $\operatorname{poly}(d/\varepsilon)$ queries. Yet it is unknown whether a structural assumption on the ground-truth parameter, such as sparsity, could break the $\varepsilon\sqrt{d}$ barrier. In this paper, we address this question by showing that algorithms can obtain $O(\varepsilon)$-optimal actions by querying $O(\varepsilon^{-s}d^s)$ actions, where $s$ is the sparsity parameter, removing the $\exp(d)$-dependence. We then establish information-theoretical lower bounds, i.e., $\Omega(\exp(s))$, to show that our upper bound on sample complexity is nearly tight if one demands an error $ O(s^{\delta}\varepsilon)$ for $0<\delta<1$. For $\delta\geq 1$, we further show that $\operatorname{poly}(s/\varepsilon)$ queries are possible when the linear features are "good" and even in general settings. These results provide a nearly complete picture of how sparsity can help in misspecified bandit learning and provide a deeper understanding of when linear features are "useful" for bandit and reinforcement learning with misspecification.
Near Sample-Optimal Reduction-based Policy Learning for Average Reward MDP
Dec 01, 2022This work considers the sample complexity of obtaining an $\varepsilon$-optimal policy in an average reward Markov Decision Process (AMDP), given access to a generative model (simulator). When the ground-truth MDP is weakly communicating, we prove an upper bound of $\widetilde O(H \varepsilon^{-3} \ln \frac{1}{\delta})$ samples per state-action pair, where $H := sp(h^*)$ is the span of bias of any optimal policy, $\varepsilon$ is the accuracy and $\delta$ is the failure probability. This bound improves the best-known mixing-time-based approaches in [Jin & Sidford 2021], which assume the mixing-time of every deterministic policy is bounded. The core of our analysis is a proper reduction bound from AMDP problems to discounted MDP (DMDP) problems, which may be of independent interests since it allows the application of DMDP algorithms for AMDP in other settings. We complement our upper bound by proving a minimax lower bound of $\Omega(|\mathcal S| |\mathcal A| H \varepsilon^{-2} \ln \frac{1}{\delta})$ total samples, showing that a linear dependent on $H$ is necessary and that our upper bound matches the lower bound in all parameters of $(|\mathcal S|, |\mathcal A|, H, \ln \frac{1}{\delta})$ up to some logarithmic factors.