 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Flow Fields in Attention for Controllable Person Image Generation
Dec 12, 2024



Controllable person image generation aims to generate a person image conditioned on reference images, allowing precise control over the person's appearance or pose. However, prior methods often distort fine-grained textural details from the reference image, despite achieving high overall image quality. We attribute these distortions to inadequate attention to corresponding regions in the reference image. To address this, we thereby propose learning flow fields in attention (Leffa), which explicitly guides the target query to attend to the correct reference key in the attention layer during training. Specifically, it is realized via a regularization loss on top of the attention map within a diffusion-based baseline. Our extensive experiments show that Leffa achieves state-of-the-art performance in controlling appearance (virtual try-on) and pose (pose transfer), significantly reducing fine-grained detail distortion while maintaining high image quality. Additionally, we show that our loss is model-agnostic and can be used to improve the performance of other diffusion models.
MarDini: Masked Autoregressive Diffusion for Video Generation at Scale
Oct 26, 2024



We introduce MarDini, a new family of video diffusion models that integrate the advantages of masked auto-regression (MAR) into a unified diffusion model (DM) framework. Here, MAR handles temporal planning, while DM focuses on spatial generation in an asymmetric network design: i) a MAR-based planning model containing most of the parameters generates planning signals for each masked frame using low-resolution input; ii) a lightweight generation model uses these signals to produce high-resolution frames via diffusion de-noising. MarDini's MAR enables video generation conditioned on any number of masked frames at any frame positions: a single model can handle video interpolation (e.g., masking middle frames), image-to-video generation (e.g., masking from the second frame onward), and video expansion (e.g., masking half the frames). The efficient design allocates most of the computational resources to the low-resolution planning model, making computationally expensive but important spatio-temporal attention feasible at scale. MarDini sets a new state-of-the-art for video interpolation; meanwhile, within few inference steps, it efficiently generates videos on par with those of much more expensive advanced image-to-video models.
Boundary-Denoising for Video Activity Localization
Apr 06, 2023



Video activity localization aims at understanding the semantic content in long untrimmed videos and retrieving actions of interest. The retrieved action with its start and end locations can be used for highlight generation, temporal action detection, etc. Unfortunately, learning the exact boundary location of activities is highly challenging because temporal activities are continuous in time, and there are often no clear-cut transitions between actions. Moreover, the definition of the start and end of events is subjective, which may confuse the model. To alleviate the boundary ambiguity, we propose to study the video activity localization problem from a denoising perspective. Specifically, we propose an encoder-decoder model named DenoiseLoc. During training, a set of action spans is randomly generated from the ground truth with a controlled noise scale. Then we attempt to reverse this process by boundary denoising, allowing the localizer to predict activities with precise boundaries and resulting in faster convergence speed. Experiments show that DenoiseLoc advances %in several video activity understanding tasks. For example, we observe a gain of +12.36% average mAP on QV-Highlights dataset and +1.64% mAP@0.5 on THUMOS'14 dataset over the baseline. Moreover, DenoiseLoc achieves state-of-the-art performance on TACoS and MAD datasets, but with much fewer predictions compared to other current methods.
MFAS: Multimodal Fusion Architecture Search
Mar 15, 2019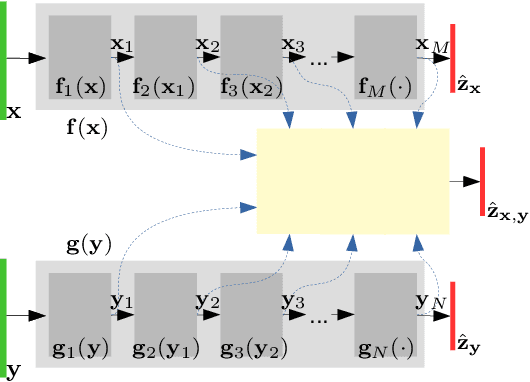
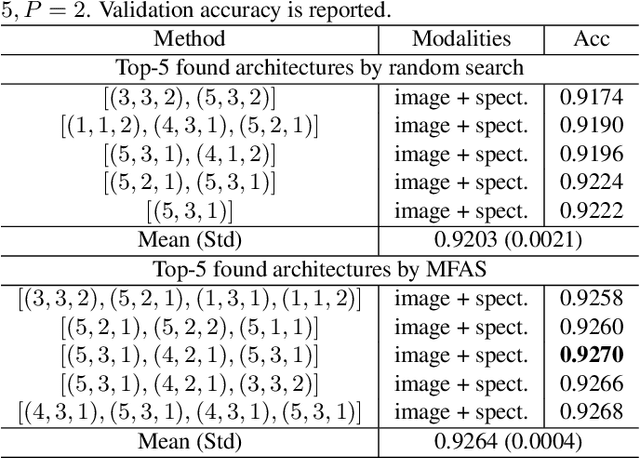
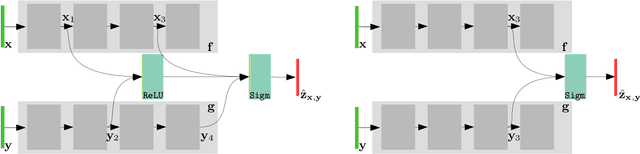
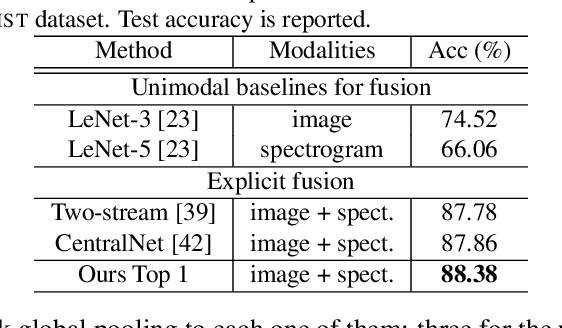
We tackle the problem of finding good architectures for multimodal classification problems. We propose a novel and generic search space that spans a large number of possible fusion architectures. In order to find an optimal architecture for a given dataset in the proposed search space, we leverage an efficient sequential model-based exploration approach that is tailored for the problem. We demonstrate the value of posing multimodal fusion as a neural architecture search problem by extensive experimentation on a toy dataset and two other real multimodal datasets. We discover fusion architectures that exhibit state-of-the-art performance for problems with different domain and dataset size, including the NTU RGB+D dataset, the largest multi-modal action recognition dataset available.
ROAM: a Rich Object Appearance Model with Application to Rotoscoping
Dec 05, 2016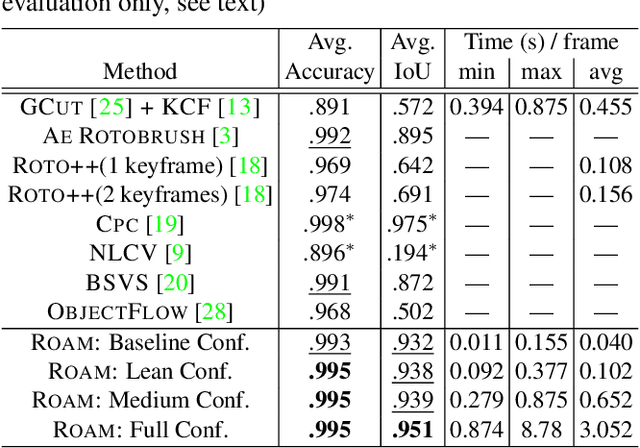
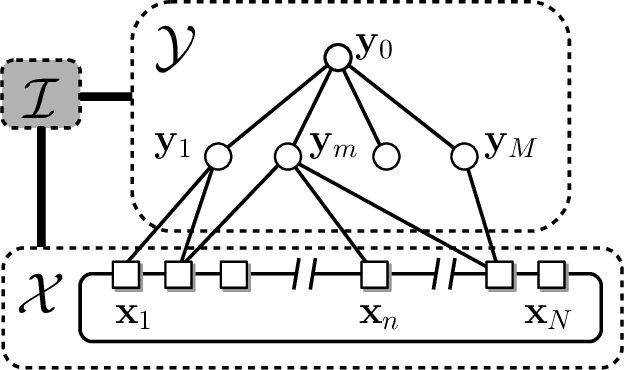
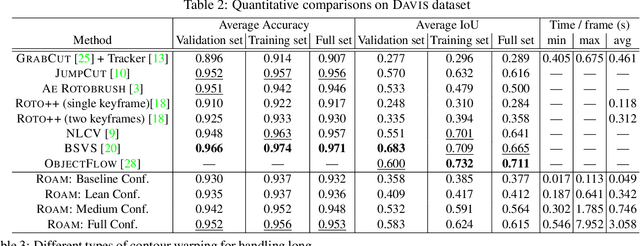
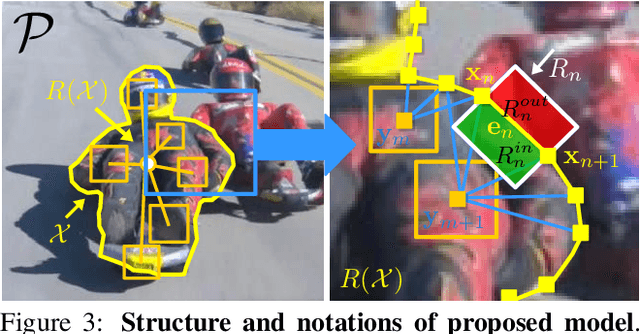
Rotoscoping, the detailed delineation of scene elements through a video shot, is a painstaking task of tremendous importance in professional post-production pipelines. While pixel-wise segmentation techniques can help for this task, professional rotoscoping tools rely on parametric curves that offer the artists a much better interactive control on the definition, editing and manipulation of the segments of interest. Sticking to this prevalent rotoscoping paradigm, we propose a novel framework to capture and track the visual aspect of an arbitrary object in a scene, given a first closed outline of this object. This model combines a collection of local foreground/background appearance models spread along the outline, a global appearance model of the enclosed object and a set of distinctive foreground landmarks. The structure of this rich appearance model allows simple initialization, efficient iterative optimization with exact minimization at each step, and on-line adaptation in videos. We demonstrate qualitatively and quantitatively the merit of this framework through comparisons with tools based on either dynamic segmentation with a closed curve or pixel-wise binary labelling.