 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS^2tory: Story Spine Distillation for Movie Script Summarization
May 05, 2026Movie scripts pose a fundamental challenge for automatic summarization due to their non-linear, cross-cut narrative structure, which makes surface-level saliency methods ineffective at preserving core story progression. To address this, we introduce S^2tory (Story Spine Distillation), a narratology-grounded framework that leverages character development trajectories to identify plot nuclei, the essential events that drive the narrative forward, while filtering out peripheral satellite events that merely enrich atmosphere or emotion. Our Narrative Expert Agent (NEAgent) performs theory-constrained reasoning, whose distilled knowledge conditions a small model to identify plot nuclei. Another model then uses these plot nuclei to generate the summary. Experiments on the MovieSum dataset demonstrate state-of-the-art semantic fidelity at approximately 3.5x compression, and zero-shot evaluation on BookSum confirms strong out-of-domain generalization. Human evaluation further validates that narratological theory provides an indispensable foundation for modeling complex, non-linear narratives.
PEARL: Plan Exploration and Adaptive Reinforcement Learning for Multihop Tool Use
Jan 28, 2026Large Language Models show great potential with external tools, but face significant challenges in complex, multi-turn tool invocation. They often exhibit weak planning, tool hallucination, erroneous parameter generation, and struggle with robust interaction. To tackle these issues, we present PEARL, a novel framework to enhance LLM planning and execution for sophisticated tool use. PEARL adopts a two-stage approach: an offline phase where the agent explores tools to learn valid usage patterns and failure conditions, and an online reinforcement learning phase. In the online phase, a dedicated Planner is trained via group Relative Policy Optimization (GRPO) with a carefully designed reward function that provides distinct signals for planning quality. Experiments on the ToolHop and T-Eval benchmarks show PEARL significantly outperforms existing methods, achieving a new state-of-the-art success rate of \textbf{56.5\%} on ToolHop while maintaining a low invocation error rate. Our work marks a key advance in addressing the complex planning challenges of tool use, contributing to the development of more robust and reliable LLM-based agents.
Beyond Accuracy: A Cognitive Load Framework for Mapping the Capability Boundaries of Tool-use Agents
Jan 28, 2026The ability of Large Language Models (LLMs) to use external tools unlocks powerful real-world interactions, making rigorous evaluation essential. However, current benchmarks primarily report final accuracy, revealing what models can do but obscuring the cognitive bottlenecks that define their true capability boundaries. To move from simple performance scoring to a diagnostic tool, we introduce a framework grounded in Cognitive Load Theory. Our framework deconstructs task complexity into two quantifiable components: Intrinsic Load, the inherent structural complexity of the solution path, formalized with a novel Tool Interaction Graph; and Extraneous Load, the difficulty arising from ambiguous task presentation. To enable controlled experiments, we construct ToolLoad-Bench, the first benchmark with parametrically adjustable cognitive load. Our evaluation reveals distinct performance cliffs as cognitive load increases, allowing us to precisely map each model's capability boundary. We validate that our framework's predictions are highly calibrated with empirical results, establishing a principled methodology for understanding an agent's limits and a practical foundation for building more efficient systems.
Learning Safe Unlabeled Multi-Robot Planning with Motion Constraints
Jul 11, 2019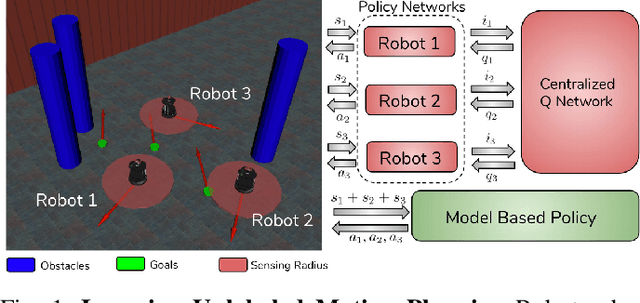
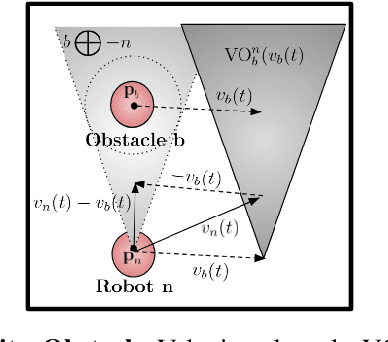
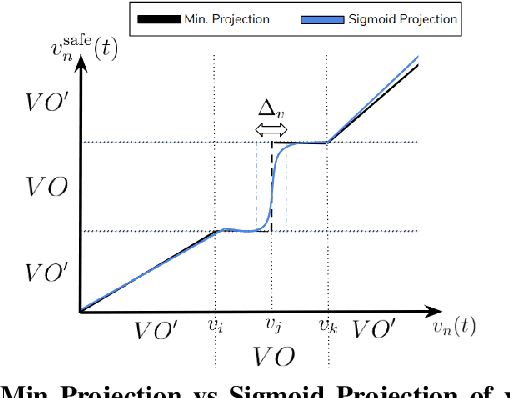
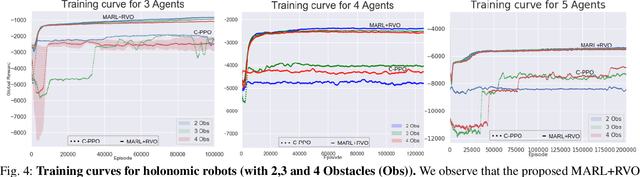
In this paper, we present a learning approach to goal assignment and trajectory planning for unlabeled robots operating in 2D, obstacle-filled workspaces. More specifically, we tackle the unlabeled multi-robot motion planning problem with motion constraints as a multi-agent reinforcement learning problem with some sparse global reward. In contrast with previous works, which formulate an entirely new hand-crafted optimization cost or trajectory generation algorithm for a different robot dynamic model, our framework is a general approach that is applicable to arbitrary robot models. Further, by using the velocity obstacle, we devise a smooth projection that guarantees collision free trajectories for all robots with respect to their neighbors and obstacles. The efficacy of our algorithm is demonstrated through varied simulations.