 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCURVE: Learning Causality-Inspired Invariant Representations for Robust Scene Understanding via Uncertainty-Guided Regularization
Jan 28, 2026Scene graphs provide structured abstractions for scene understanding, yet they often overfit to spurious correlations, severely hindering out-of-distribution generalization. To address this limitation, we propose CURVE, a causality-inspired framework that integrates variational uncertainty modeling with uncertainty-guided structural regularization to suppress high-variance, environment-specific relations. Specifically, we apply prototype-conditioned debiasing to disentangle invariant interaction dynamics from environment-dependent variations, promoting a sparse and domain-stable topology. Empirically, we evaluate CURVE in zero-shot transfer and low-data sim-to-real adaptation, verifying its ability to learn domain-stable sparse topologies and provide reliable uncertainty estimates to support risk prediction under distribution shifts.
Driving in Corner Case: A Real-World Adversarial Closed-Loop Evaluation Platform for End-to-End Autonomous Driving
Dec 18, 2025



Safety-critical corner cases, difficult to collect in the real world, are crucial for evaluating end-to-end autonomous driving. Adversarial interaction is an effective method to generate such safety-critical corner cases. While existing adversarial evaluation methods are built for models operating in simplified simulation environments, adversarial evaluation for real-world end-to-end autonomous driving has been little explored. To address this challenge, we propose a closed-loop evaluation platform for end-to-end autonomous driving, which can generate adversarial interactions in real-world scenes. In our platform, the real-world image generator cooperates with an adversarial traffic policy to evaluate various end-to-end models trained on real-world data. The generator, based on flow matching, efficiently and stably generates real-world images according to the traffic environment information. The efficient adversarial surrounding vehicle policy is designed to model challenging interactions and create corner cases that current autonomous driving systems struggle to handle. Experimental results demonstrate that the platform can generate realistic driving images efficiently. Through evaluating the end-to-end models such as UniAD and VAD, we demonstrate that based on the adversarial policy, our platform evaluates the performance degradation of the tested model in corner cases. This result indicates that this platform can effectively detect the model's potential issues, which will facilitate the safety and robustness of end-to-end autonomous driving.
Self-Localization of Parking Robots Using Square-Like Landmarks
Dec 23, 2018
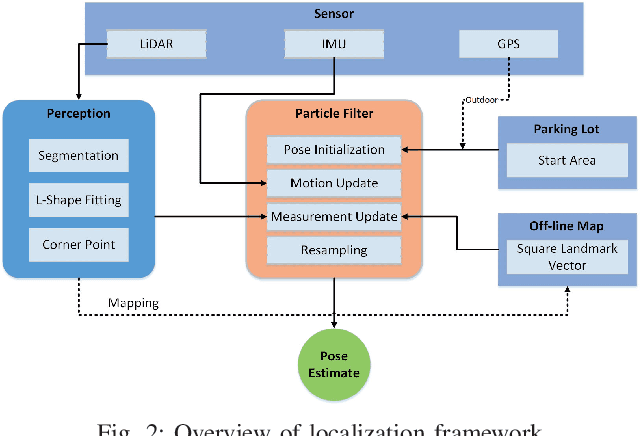
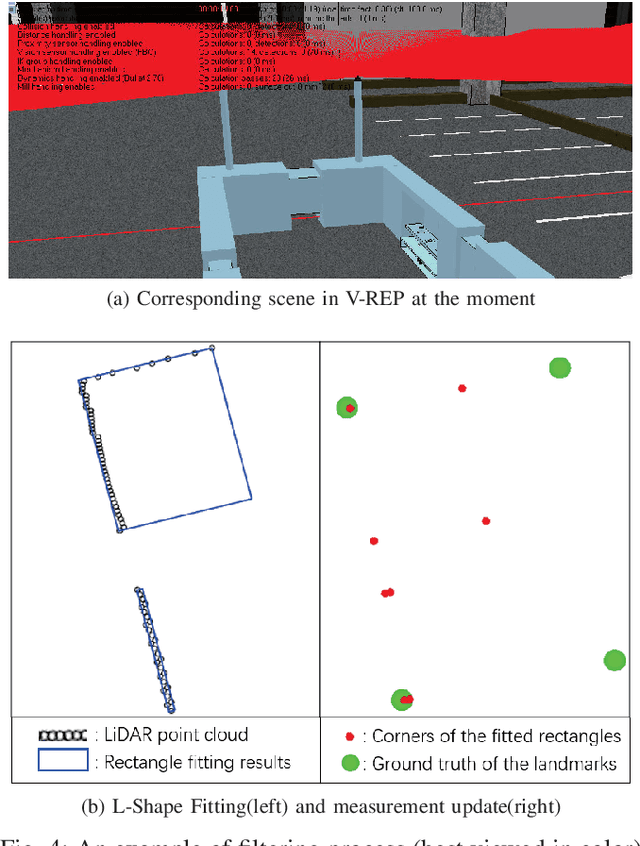
In this paper, we present a framework for self-localization of parking robots in a parking lot innovatively using square-like landmarks, aiming to provide a positioning solution with low cost but high accuracy. It utilizes square structures common in parking lots such as pillars, corners or charging piles as robust landmarks and deduces the global pose of the robot in conjunction with an off-line map. The localization is performed in real-time via Particle Filter using a single line scanning LiDAR as main sensor, an odometry as secondary information sources. The system has been tested in a simulation environment built in V-REP, the result of which demonstrates its positioning accuracy below 0.20 m and a corresponding heading error below 1{\deg}.