 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Vehicle Trajectory Planning for Static Obstacle Avoidance using Nonlinear Optimization
Jul 18, 2023



Vehicle trajectory planning is a key component for an autonomous driving system. A practical system not only requires the component to compute a feasible trajectory, but also a comfortable one given certain comfort metrics. Nevertheless, computation efficiency is critical for the system to be deployed as a commercial product. In this paper, we present a novel trajectory planning algorithm based on nonlinear optimization. The algorithm computes a kinematically feasible and comfort-optimal trajectory that achieves collision avoidance with static obstacles. Furthermore, the algorithm is time efficient. It generates an 6-second trajectory within 10 milliseconds on an Intel i7 machine or 20 milliseconds on an Nvidia Drive Orin platform.
Interactive Trajectory Planner for Mandatory Lane Changing in Dense Non-Cooperative Traffic
Mar 04, 2023



When the traffic stream is extremely congested and surrounding vehicles are not cooperative, the mandatory lane changing can be significantly difficult. In this work, we propose an interactive trajectory planner, which will firstly attempt to change lanes as long as safety is ensured. Based on receding horizon planning, the ego vehicle can abort or continue changing lanes according to surrounding vehicles' reactions. We demonstrate the performance of our planner in extensive simulations with eight surrounding vehicles, initial velocity ranging from 0.5 to 5 meters per second, and bumper to bumper gap ranging from 4 to 10 meters. The ego vehicle with our planner can change lanes safely and smoothly. The computation time of the planner at every step is within 10 milliseconds in most cases on a laptop with 1.8GHz Intel Core i7-10610U.
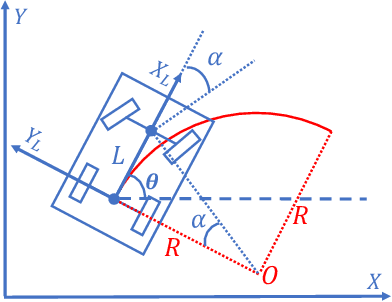
Optimal Trajectory Generation for Autonomous Vehicles Under Centripetal Acceleration Constraints for In-lane Driving Scenarios
Dec 03, 2021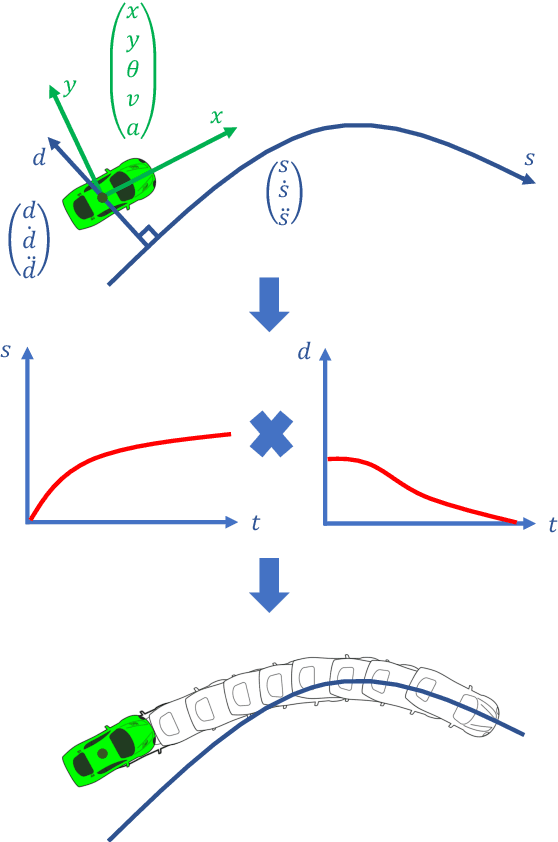
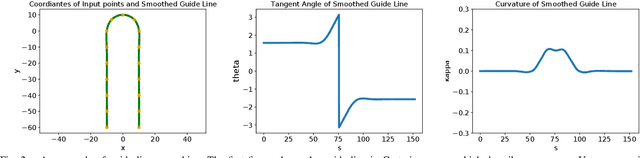
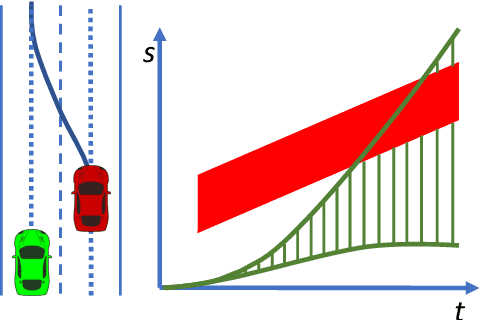
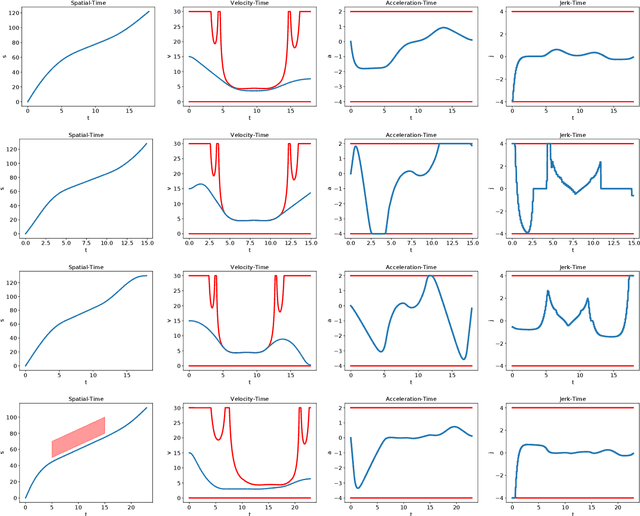
This paper presents a noval method that generates optimal trajectories for autonomous vehicles for in-lane driving scenarios. The method computes a trajectory using a two-phase optimization procedure. In the first phase, the optimization procedure generates a close-form driving guide line with differetiable curvatures. In the second phase, the procedure takes the driving guide line as input, and outputs dynamically feasible, jerk and time optimal trajectories for vehicles driving along the guide line. This method is especially useful for generating trajectories at curvy road where the vehicles need to apply frequent accelerations and decelerations to accommodate centripetal acceleration limits.
Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
Dec 03, 2021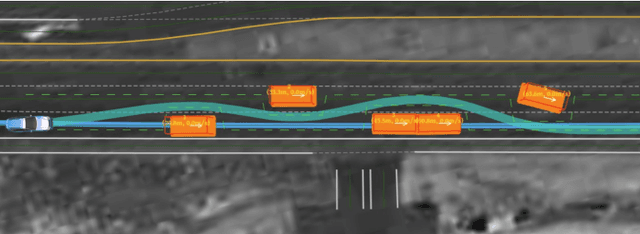
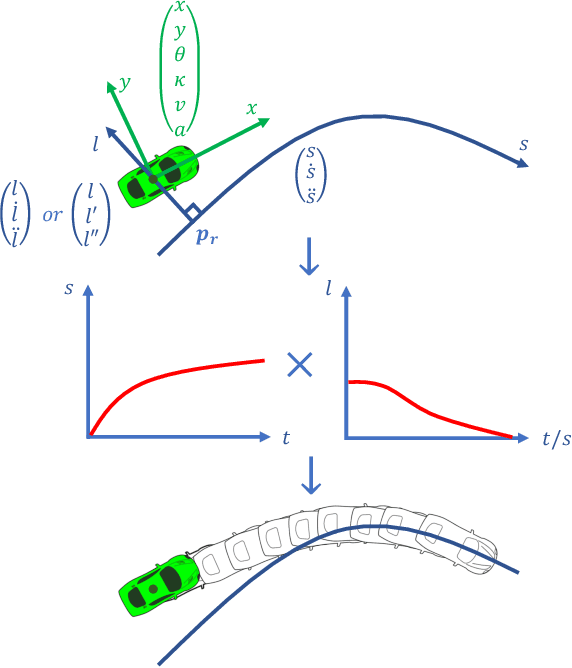

Path planning is a key component in motion planning for autonomous vehicles. A path specifies the geometrical shape that the vehicle will travel, thus, it is critical to safe and comfortable vehicle motions. For urban driving scenarios, autonomous vehicles need the ability to navigate in cluttered environment, e.g., roads partially blocked by a number of vehicles/obstacles on the sides. How to generate a kinematically feasible and smooth path, that can avoid collision in complex environment, makes path planning a challenging problem. In this paper, we present a novel quadratic programming approach that generates optimal paths with resolution-complete collision avoidance capability.