 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges and Opportunities in Offline Reinforcement Learning from Visual Observations
Jun 09, 2022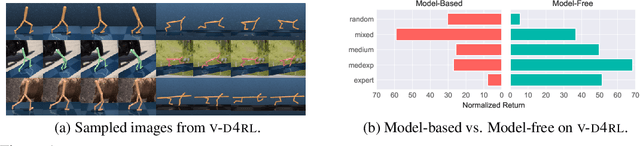
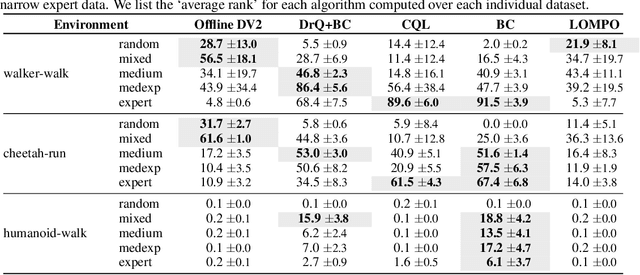
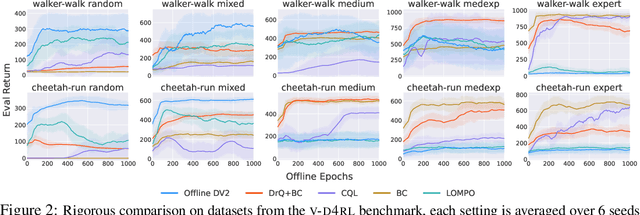

Offline reinforcement learning has shown great promise in leveraging large pre-collected datasets for policy learning, allowing agents to forgo often-expensive online data collection. However, to date, offline reinforcement learning from has been relatively under-explored, and there is a lack of understanding of where the remaining challenges lie. In this paper, we seek to establish simple baselines for continuous control in the visual domain. We show that simple modifications to two state-of-the-art vision-based online reinforcement learning algorithms, DreamerV2 and DrQ-v2, suffice to outperform prior work and establish a competitive baseline. We rigorously evaluate these algorithms on both existing offline datasets and a new testbed for offline reinforcement learning from visual observations that better represents the data distributions present in real-world offline reinforcement learning problems, and open-source our code and data to facilitate progress in this important domain. Finally, we present and analyze several key desiderata unique to offline RL from visual observations, including visual distractions and visually identifiable changes in dynamics.
Insights From the NeurIPS 2021 NetHack Challenge
Mar 22, 2022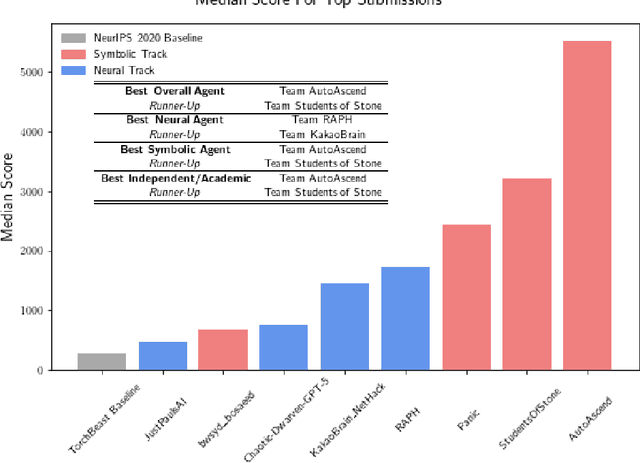

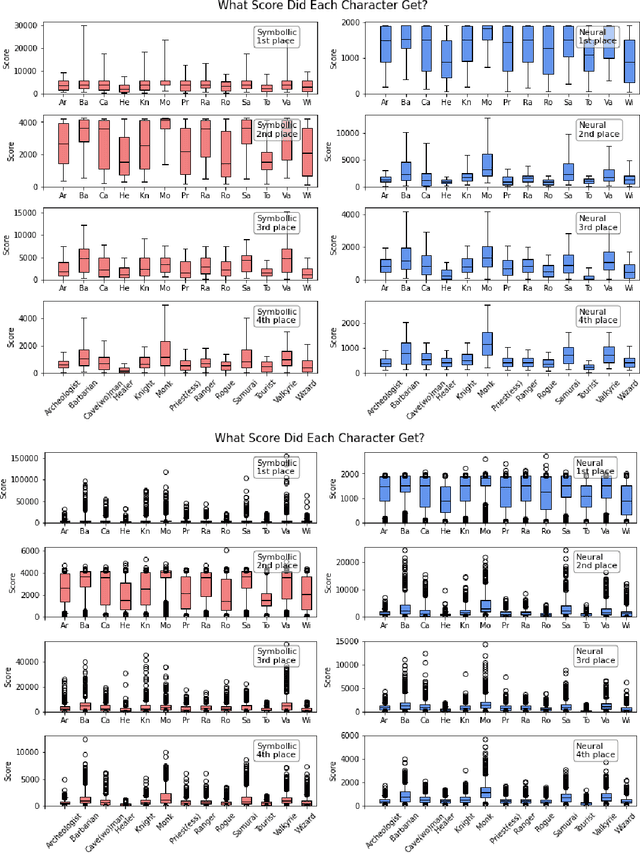
In this report, we summarize the takeaways from the first NeurIPS 2021 NetHack Challenge. Participants were tasked with developing a program or agent that can win (i.e., 'ascend' in) the popular dungeon-crawler game of NetHack by interacting with the NetHack Learning Environment (NLE), a scalable, procedurally generated, and challenging Gym environment for reinforcement learning (RL). The challenge showcased community-driven progress in AI with many diverse approaches significantly beating the previously best results on NetHack. Furthermore, it served as a direct comparison between neural (e.g., deep RL) and symbolic AI, as well as hybrid systems, demonstrating that on NetHack symbolic bots currently outperform deep RL by a large margin. Lastly, no agent got close to winning the game, illustrating NetHack's suitability as a long-term benchmark for AI research.
Evolving Curricula with Regret-Based Environment Design
Mar 08, 2022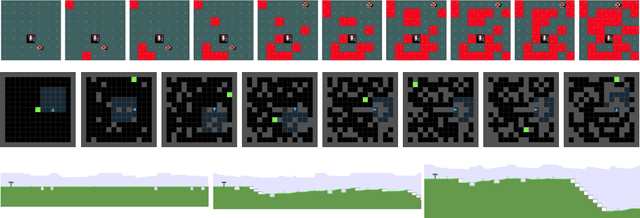

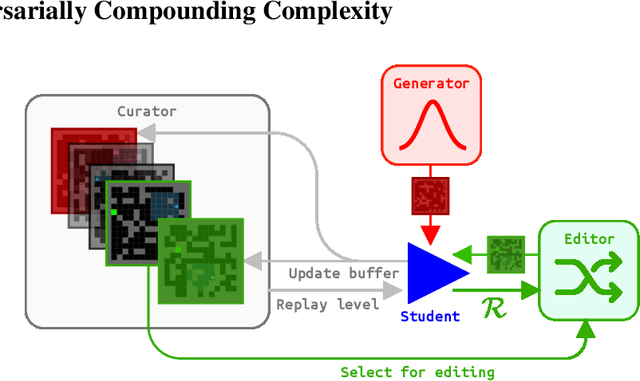
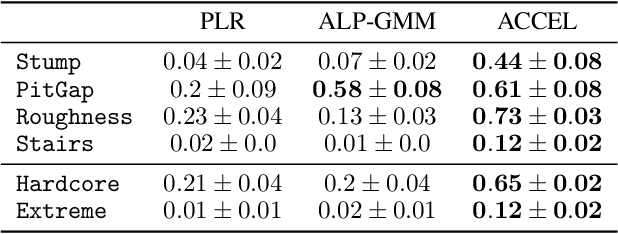
It remains a significant challenge to train generally capable agents with reinforcement learning (RL). A promising avenue for improving the robustness of RL agents is through the use of curricula. One such class of methods frames environment design as a game between a student and a teacher, using regret-based objectives to produce environment instantiations (or levels) at the frontier of the student agent's capabilities. These methods benefit from their generality, with theoretical guarantees at equilibrium, yet they often struggle to find effective levels in challenging design spaces. By contrast, evolutionary approaches seek to incrementally alter environment complexity, resulting in potentially open-ended learning, but often rely on domain-specific heuristics and vast amounts of computational resources. In this paper we propose to harness the power of evolution in a principled, regret-based curriculum. Our approach, which we call Adversarially Compounding Complexity by Editing Levels (ACCEL), seeks to constantly produce levels at the frontier of an agent's capabilities, resulting in curricula that start simple but become increasingly complex. ACCEL maintains the theoretical benefits of prior regret-based methods, while providing significant empirical gains in a diverse set of environments. An interactive version of the paper is available at accelagent.github.io.
On-the-fly Strategy Adaptation for ad-hoc Agent Coordination
Mar 08, 2022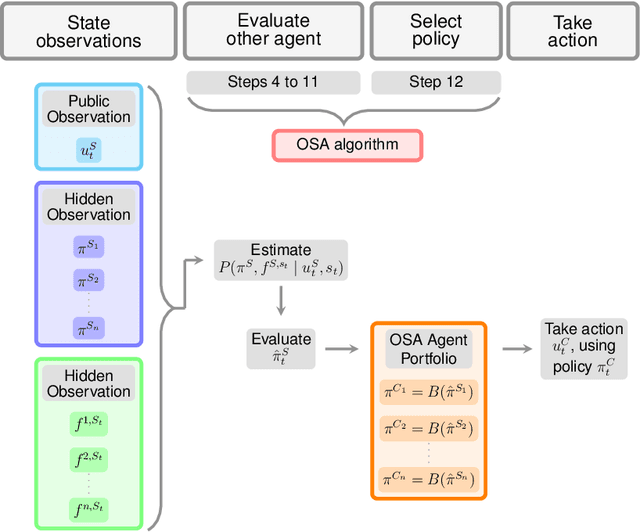
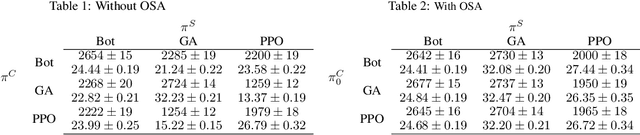

Training agents in cooperative settings offers the promise of AI agents able to interact effectively with humans (and other agents) in the real world. Multi-agent reinforcement learning (MARL) has the potential to achieve this goal, demonstrating success in a series of challenging problems. However, whilst these advances are significant, the vast majority of focus has been on the self-play paradigm. This often results in a coordination problem, caused by agents learning to make use of arbitrary conventions when playing with themselves. This means that even the strongest self-play agents may have very low cross-play with other agents, including other initializations of the same algorithm. In this paper we propose to solve this problem by adapting agent strategies on the fly, using a posterior belief over the other agents' strategy. Concretely, we consider the problem of selecting a strategy from a finite set of previously trained agents, to play with an unknown partner. We propose an extension of the classic statistical technique, Gibbs sampling, to update beliefs about other agents and obtain close to optimal ad-hoc performance. Despite its simplicity, our method is able to achieve strong cross-play with unseen partners in the challenging card game of Hanabi, achieving successful ad-hoc coordination without knowledge of the partner's strategy a priori.
Automated Reinforcement Learning (AutoRL): A Survey and Open Problems
Jan 11, 2022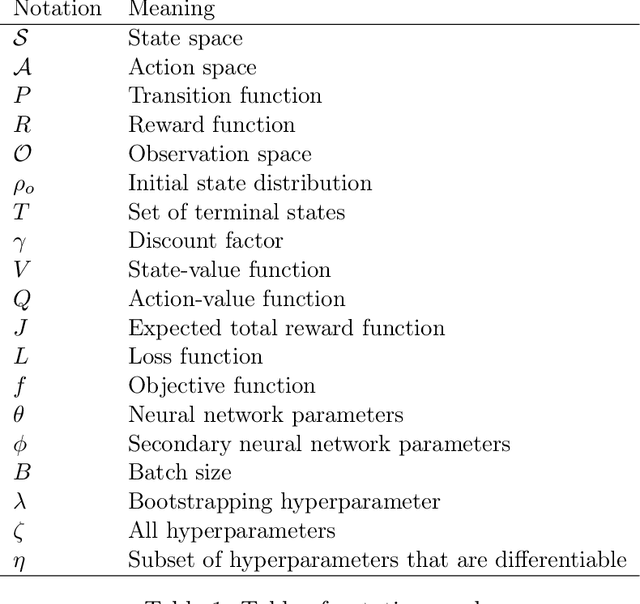
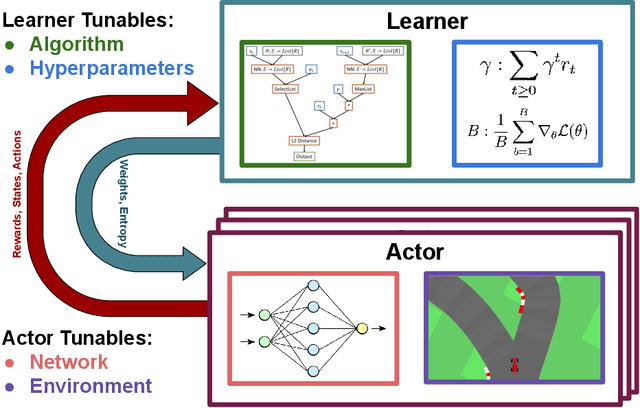
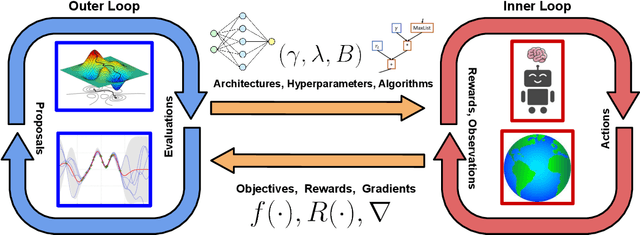

The combination of Reinforcement Learning (RL) with deep learning has led to a series of impressive feats, with many believing (deep) RL provides a path towards generally capable agents. However, the success of RL agents is often highly sensitive to design choices in the training process, which may require tedious and error-prone manual tuning. This makes it challenging to use RL for new problems, while also limits its full potential. In many other areas of machine learning, AutoML has shown it is possible to automate such design choices and has also yielded promising initial results when applied to RL. However, Automated Reinforcement Learning (AutoRL) involves not only standard applications of AutoML but also includes additional challenges unique to RL, that naturally produce a different set of methods. As such, AutoRL has been emerging as an important area of research in RL, providing promise in a variety of applications from RNA design to playing games such as Go. Given the diversity of methods and environments considered in RL, much of the research has been conducted in distinct subfields, ranging from meta-learning to evolution. In this survey we seek to unify the field of AutoRL, we provide a common taxonomy, discuss each area in detail and pose open problems which would be of interest to researchers going forward.
Lyapunov Exponents for Diversity in Differentiable Games
Dec 24, 2021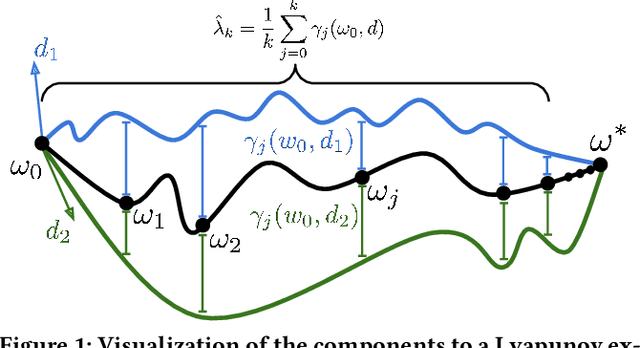

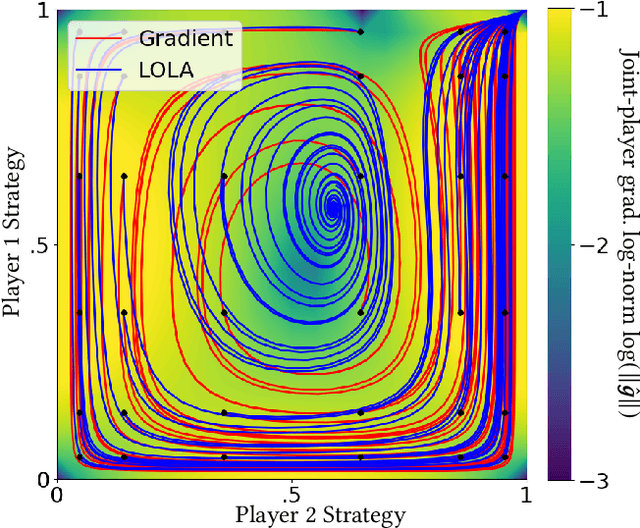
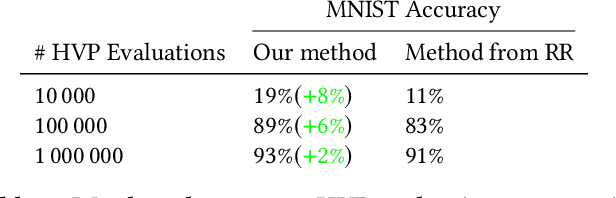
Ridge Rider (RR) is an algorithm for finding diverse solutions to optimization problems by following eigenvectors of the Hessian ("ridges"). RR is designed for conservative gradient systems (i.e., settings involving a single loss function), where it branches at saddles - easy-to-find bifurcation points. We generalize this idea to non-conservative, multi-agent gradient systems by proposing a method - denoted Generalized Ridge Rider (GRR) - for finding arbitrary bifurcation points. We give theoretical motivation for our method by leveraging machinery from the field of dynamical systems. We construct novel toy problems where we can visualize new phenomena while giving insight into high-dimensional problems of interest. Finally, we empirically evaluate our method by finding diverse solutions in the iterated prisoners' dilemma and relevant machine learning problems including generative adversarial networks.
Towards an Understanding of Default Policies in Multitask Policy Optimization
Nov 06, 2021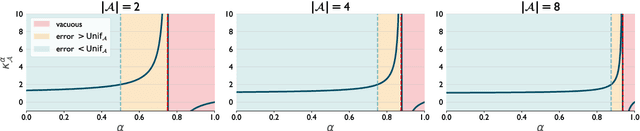


Much of the recent success of deep reinforcement learning has been driven by regularized policy optimization (RPO) algorithms, with strong performance across multiple domains. In this family of methods, agents are trained to maximize cumulative reward while penalizing deviation in behavior from some reference, or default policy. In addition to empirical success, there is a strong theoretical foundation for understanding RPO methods applied to single tasks, with connections to natural gradient, trust region, and variational approaches. However, there is limited formal understanding of desirable properties for default policies in the multitask setting, an increasingly important domain as the field shifts towards training more generally capable agents. Here, we take a first step towards filling this gap by formally linking the quality of the default policy to its effect on optimization. Using these results, we then derive a principled RPO algorithm for multitask learning with strong performance guarantees.
Revisiting Design Choices in Model-Based Offline Reinforcement Learning
Oct 08, 2021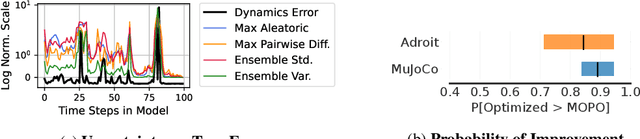
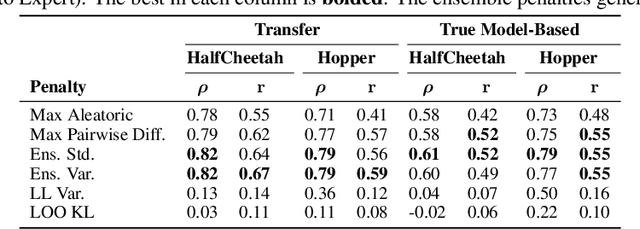
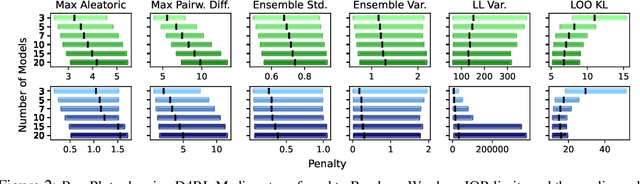
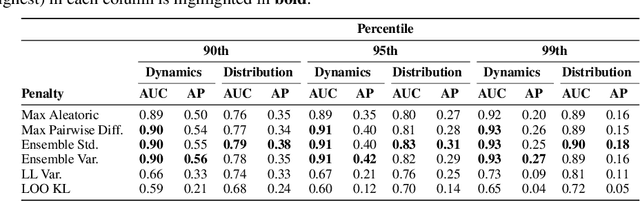
Offline reinforcement learning enables agents to leverage large pre-collected datasets of environment transitions to learn control policies, circumventing the need for potentially expensive or unsafe online data collection. Significant progress has been made recently in offline model-based reinforcement learning, approaches which leverage a learned dynamics model. This typically involves constructing a probabilistic model, and using the model uncertainty to penalize rewards where there is insufficient data, solving for a pessimistic MDP that lower bounds the true MDP. Existing methods, however, exhibit a breakdown between theory and practice, whereby pessimistic return ought to be bounded by the total variation distance of the model from the true dynamics, but is instead implemented through a penalty based on estimated model uncertainty. This has spawned a variety of uncertainty heuristics, with little to no comparison between differing approaches. In this paper, we compare these heuristics, and design novel protocols to investigate their interaction with other hyperparameters, such as the number of models, or imaginary rollout horizon. Using these insights, we show that selecting these key hyperparameters using Bayesian Optimization produces superior configurations that are vastly different to those currently used in existing hand-tuned state-of-the-art methods, and result in drastically stronger performance.
Replay-Guided Adversarial Environment Design
Oct 06, 2021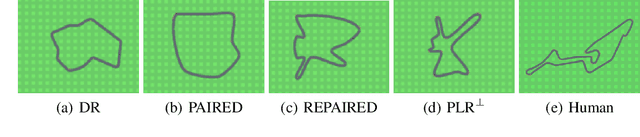
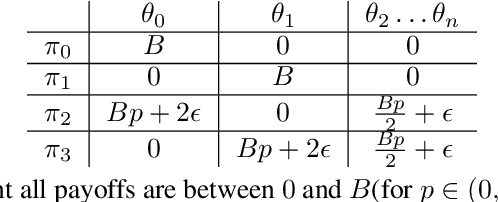
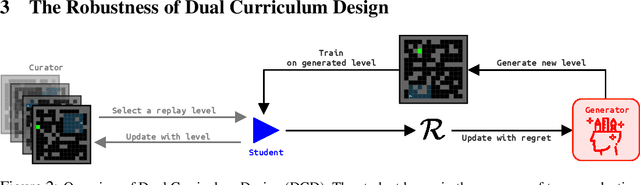
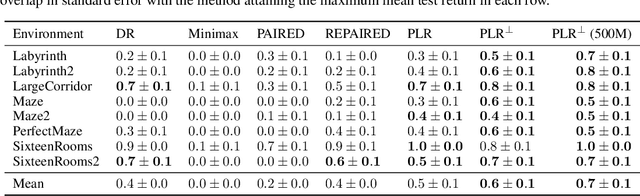
Deep reinforcement learning (RL) agents may successfully generalize to new settings if trained on an appropriately diverse set of environment and task configurations. Unsupervised Environment Design (UED) is a promising self-supervised RL paradigm, wherein the free parameters of an underspecified environment are automatically adapted during training to the agent's capabilities, leading to the emergence of diverse training environments. Here, we cast Prioritized Level Replay (PLR), an empirically successful but theoretically unmotivated method that selectively samples randomly-generated training levels, as UED. We argue that by curating completely random levels, PLR, too, can generate novel and complex levels for effective training. This insight reveals a natural class of UED methods we call Dual Curriculum Design (DCD). Crucially, DCD includes both PLR and a popular UED algorithm, PAIRED, as special cases and inherits similar theoretical guarantees. This connection allows us to develop novel theory for PLR, providing a version with a robustness guarantee at Nash equilibria. Furthermore, our theory suggests a highly counterintuitive improvement to PLR: by stopping the agent from updating its policy on uncurated levels (training on less data), we can improve the convergence to Nash equilibria. Indeed, our experiments confirm that our new method, PLR$^{\perp}$, obtains better results on a suite of out-of-distribution, zero-shot transfer tasks, in addition to demonstrating that PLR$^{\perp}$ improves the performance of PAIRED, from which it inherited its theoretical framework.
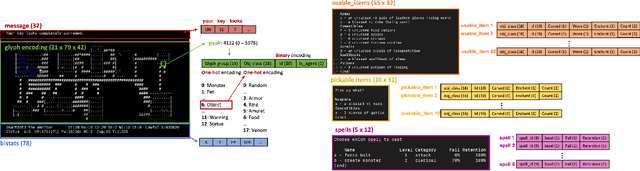
MiniHack the Planet: A Sandbox for Open-Ended Reinforcement Learning Research
Sep 27, 2021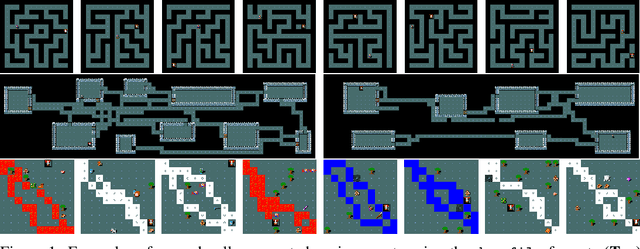
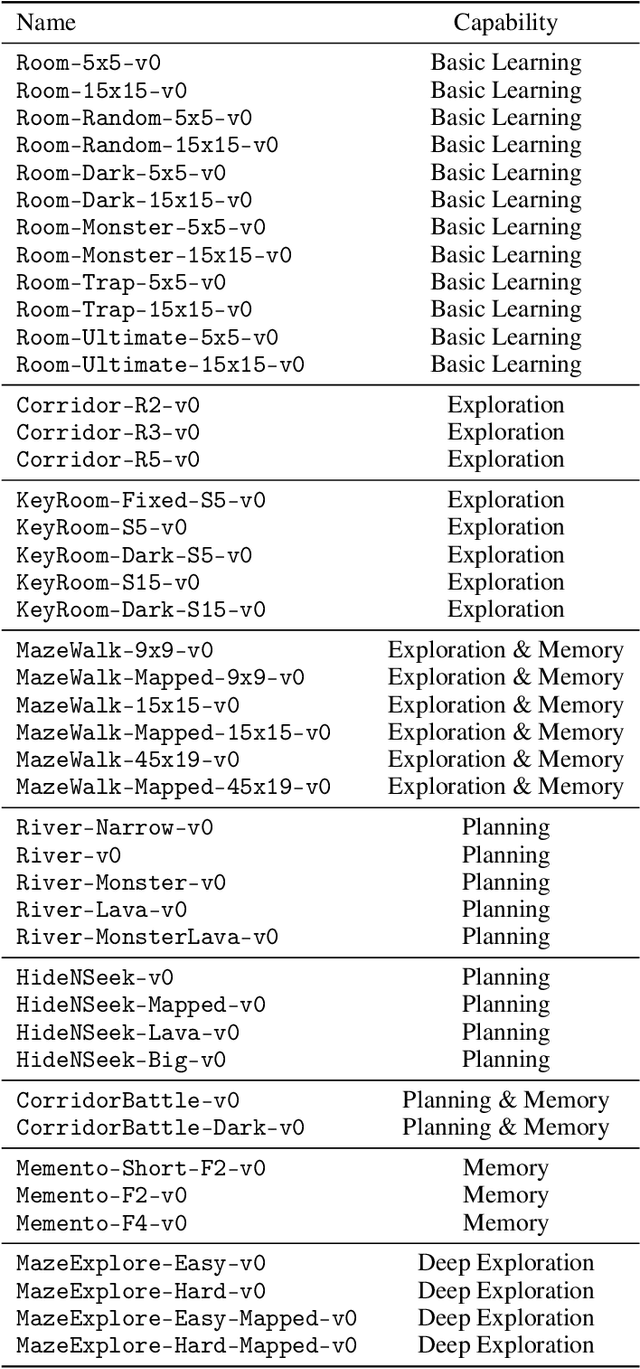
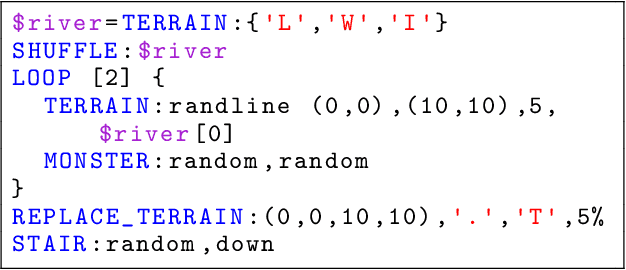
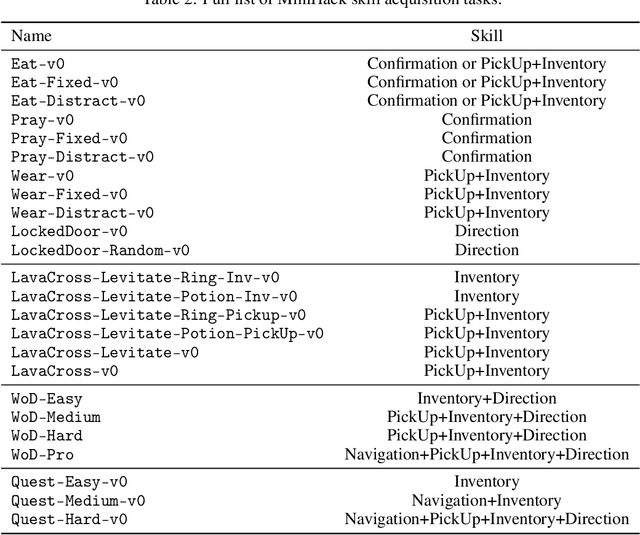
The progress in deep reinforcement learning (RL) is heavily driven by the availability of challenging benchmarks used for training agents. However, benchmarks that are widely adopted by the community are not explicitly designed for evaluating specific capabilities of RL methods. While there exist environments for assessing particular open problems in RL (such as exploration, transfer learning, unsupervised environment design, or even language-assisted RL), it is generally difficult to extend these to richer, more complex environments once research goes beyond proof-of-concept results. We present MiniHack, a powerful sandbox framework for easily designing novel RL environments. MiniHack is a one-stop shop for RL experiments with environments ranging from small rooms to complex, procedurally generated worlds. By leveraging the full set of entities and environment dynamics from NetHack, one of the richest grid-based video games, MiniHack allows designing custom RL testbeds that are fast and convenient to use. With this sandbox framework, novel environments can be designed easily, either using a human-readable description language or a simple Python interface. In addition to a variety of RL tasks and baselines, MiniHack can wrap existing RL benchmarks and provide ways to seamlessly add additional complexity.