 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFineBench: Benchmarking and Enhancing Vision-Language Models for Fine-grained Human Activity Understanding
May 20, 2026Vision-Language Models (VLMs) have demonstrated remarkable capabilities in general video understanding, yet they often struggle with the fine-grained comprehension crucial for real-world applications requiring nuanced interpretation of human actions and interactions. While some recent human-centric benchmarks evaluate aspects of model behaviour such as fairness/ethics, emotion perception, and broader human-centric metrics, they do not combine long-form videos, very dense QA coverage, and frame-level spatial/temporal grounding at scale. To bridge this gap, we introduce FineBench, a human-centric video question answering (VQA) benchmark specifically designed to assess fine-grained understanding. FineBench comprises 199,420 multiple-choice QA pairs densely annotated across 64 long-form videos (15 minutes each), focusing on detailed person movement, person interaction, and object manipulation, including compositional actions. Our extensive evaluation reveals that while proprietary models like GPT-5 achieve respectable performance, current open-source VLMs significantly underperform, struggling particularly with spatial reasoning in multi-person scenes and distinguishing subtle differences in human movements and interactions. To address these identified weaknesses, we propose FineAgent, a modular framework that enhances VLMs by leveraging a Localizer and a Descriptor. Experiments show that FineAgent consistently improves the performance of various open VLMs on FineBench. FineBench provides a rigorous testbed for future research into fine-grained human-centric video understanding, while FineAgent offers a practical approach to enhance such reasoning in current VLMs. Project page and code at https://joslefaure.github.io/assets/html/finebench.html.
SPATIOROUTE: Dynamic Prompt Routing for Zero-Shot Spatial Reasoning
May 18, 2026Spatial question answering over egocentric video is a challenging task that requires Vision-Language Models (VLMs) to reason about 3D object positions, scene affordances, and directional relationships, particularly in the zero-shot setting where no task-specific fine-tuning is available. We introduce SpatioRoute, a dynamic prompt generation approach that routes each incoming question to a semantically tailored prompt template -- without any additional training, fine-tuning, or 3D sensor input. SpatioRoute operates in two complementary modes: SpatioRoute-R, a rule-based router that deterministically maps question typologies (e.g., What, Is, How, Can, Which) to specialized prompt templates; and SpatioRoute-L, an LLM-driven approach that generates task-specific prompts from the question and situational context alone, with no video input at routing time. We evaluate SpatioRoute on the SQA3D benchmark across VLMs spanning model families. SpatioRoute achieves consistent overall accuracy gains up to 5% over fixed prompt baselines, establishing a new state-of-the-art for zero-shot video-only spatial VQA without requiring 3D point-cloud inputs. As an additional finding, we observe that Chain-of-Thought (CoT) prompting, implemented via the Think it Twice architecture, consistently degrades performance in this setting on Qwen series models, confirming that question-aware routing is more effective than uniform reasoning instructions for spatial video understanding.
SceneFunRI: Reasoning the Invisible for Task-Driven Functional Object Localization
May 14, 2026In real-world scenes, target objects may reside in regions that are not visible. While humans can often infer the locations of occluded objects from context and commonsense knowledge, this capability remains a major challenge for vision-language models (VLMs). To address this gap, we introduce SceneFunRI, a benchmark for Reasoning the Invisible. Based on the SceneFun3D dataset, SceneFunRI formulates the task as a 2D spatial reasoning problem via a semi-automatic pipeline and comprises 855 instances. It requires models to infer the locations of invisible functional objects from task instructions and commonsense reasoning. The strongest baseline model (Gemini 3 Flash) only achieves an CAcc@75 of 15.20, an mIoU of 0.74, and a Dist of 28.65. We group our prompting analysis into three categories: Strong Instruction Prompting, Reasoning-based Prompting, and Spatial Process of Elimination (SPoE). These findings indicate that invisible-region reasoning remains an unstable capability in current VLMs, motivating future work on models that more tightly integrate task intent, commonsense priors, spatial grounding, and uncertainty-aware search.
ADAPT: Benchmarking Commonsense Planning under Unspecified Affordance Constraints
Apr 16, 2026Intelligent embodied agents should not simply follow instructions, as real-world environments often involve unexpected conditions and exceptions. However, existing methods usually focus on directly executing instructions, without considering whether the target objects can actually be manipulated, meaning they fail to assess available affordances. To address this limitation, we introduce DynAfford, a benchmark that evaluates embodied agents in dynamic environments where object affordances may change over time and are not specified in the instruction. DynAfford requires agents to perceive object states, infer implicit preconditions, and adapt their actions accordingly. To enable this capability, we introduce ADAPT, a plug-and-play module that augments existing planners with explicit affordance reasoning. Experiments demonstrate that incorporating ADAPT significantly improves robustness and task success across both seen and unseen environments. We also show that a domain-adapted, LoRA-finetuned vision-language model used as the affordance inference backend outperforms a commercial LLM (GPT-4o), highlighting the importance of task-aligned affordance grounding.
VLN-NF: Feasibility-Aware Vision-and-Language Navigation with False-Premise Instructions
Apr 12, 2026Conventional Vision-and-Language Navigation (VLN) benchmarks assume instructions are feasible and the referenced target exists, leaving agents ill-equipped to handle false-premise goals. We introduce VLN-NF, a benchmark with false-premise instructions where the target is absent from the specified room and agents must navigate, gather evidence through in-room exploration, and explicitly output NOT-FOUND. VLN-NF is constructed via a scalable pipeline that rewrites VLN instructions using an LLM and verifies target absence with a VLM, producing plausible yet factually incorrect goals. We further propose REV-SPL to jointly evaluate room reaching, exploration coverage, and decision correctness. To address this challenge, we present ROAM, a two-stage hybrid that combines supervised room-level navigation with LLM/VLM-driven in-room exploration guided by a free-space clearance prior. ROAM achieves the best REV-SPL among compared methods, while baselines often under-explore and terminate prematurely under unreliable instructions. VLN-NF project page can be found at https://vln-nf.github.io/.
Affordance-Guided Coarse-to-Fine Exploration for Base Placement in Open-Vocabulary Mobile Manipulation
Nov 09, 2025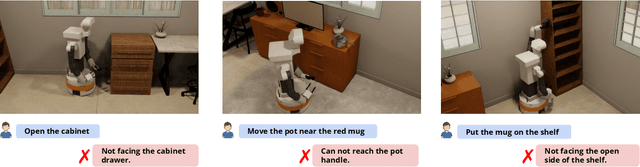
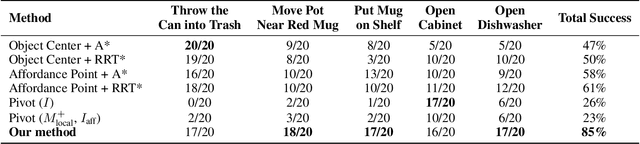
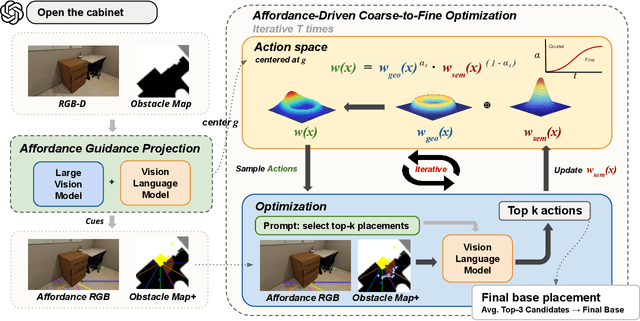

In open-vocabulary mobile manipulation (OVMM), task success often hinges on the selection of an appropriate base placement for the robot. Existing approaches typically navigate to proximity-based regions without considering affordances, resulting in frequent manipulation failures. We propose Affordance-Guided Coarse-to-Fine Exploration, a zero-shot framework for base placement that integrates semantic understanding from vision-language models (VLMs) with geometric feasibility through an iterative optimization process. Our method constructs cross-modal representations, namely Affordance RGB and Obstacle Map+, to align semantics with spatial context. This enables reasoning that extends beyond the egocentric limitations of RGB perception. To ensure interaction is guided by task-relevant affordances, we leverage coarse semantic priors from VLMs to guide the search toward task-relevant regions and refine placements with geometric constraints, thereby reducing the risk of convergence to local optima. Evaluated on five diverse open-vocabulary mobile manipulation tasks, our system achieves an 85% success rate, significantly outperforming classical geometric planners and VLM-based methods. This demonstrates the promise of affordance-aware and multimodal reasoning for generalizable, instruction-conditioned planning in OVMM.
MovieCORE: COgnitive REasoning in Movies
Aug 26, 2025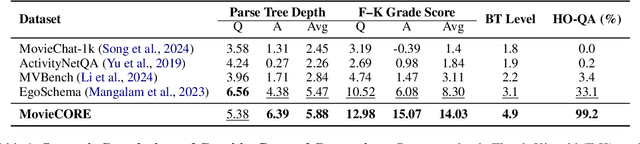
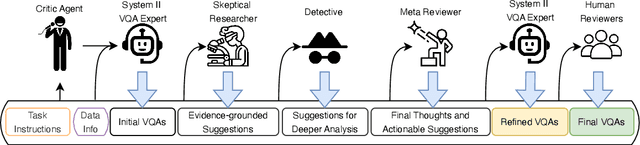
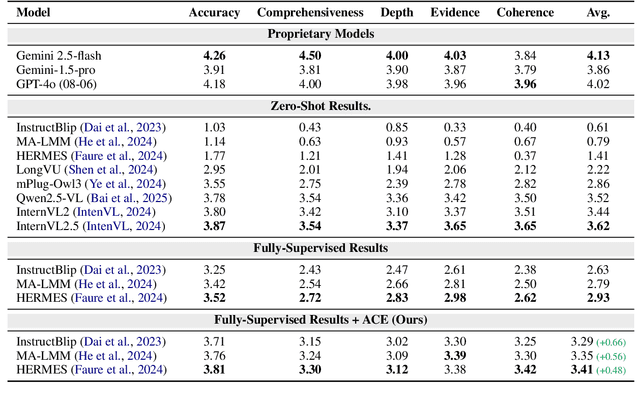
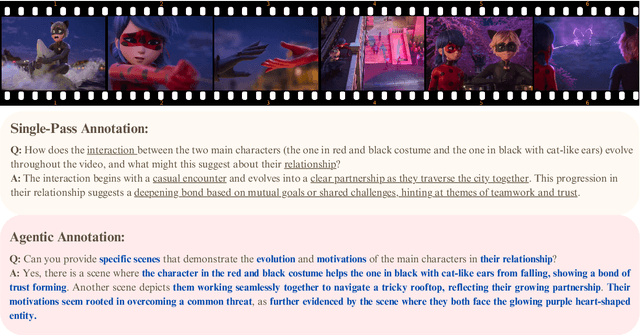
This paper introduces MovieCORE, a novel video question answering (VQA) dataset designed to probe deeper cognitive understanding of movie content. Unlike existing datasets that focus on surface-level comprehension, MovieCORE emphasizes questions that engage System-2 thinking while remaining specific to the video material. We present an innovative agentic brainstorming approach, utilizing multiple large language models (LLMs) as thought agents to generate and refine high-quality question-answer pairs. To evaluate dataset quality, we develop a set of cognitive tests assessing depth, thought-provocation potential, and syntactic complexity. We also propose a comprehensive evaluation scheme for assessing VQA model performance on deeper cognitive tasks. To address the limitations of existing video-language models (VLMs), we introduce an agentic enhancement module, Agentic Choice Enhancement (ACE), which improves model reasoning capabilities post-training by up to 25%. Our work contributes to advancing movie understanding in AI systems and provides valuable insights into the capabilities and limitations of current VQA models when faced with more challenging, nuanced questions about cinematic content. Our project page, dataset and code can be found at https://joslefaure.github.io/assets/html/moviecore.html.
Unveiling Narrative Reasoning Limits of Large Language Models with Trope in Movie Synopses
Sep 22, 2024



Large language models (LLMs) equipped with chain-of-thoughts (CoT) prompting have shown significant multi-step reasoning capabilities in factual content like mathematics, commonsense, and logic. However, their performance in narrative reasoning, which demands greater abstraction capabilities, remains unexplored. This study utilizes tropes in movie synopses to assess the abstract reasoning abilities of state-of-the-art LLMs and uncovers their low performance. We introduce a trope-wise querying approach to address these challenges and boost the F1 score by 11.8 points. Moreover, while prior studies suggest that CoT enhances multi-step reasoning, this study shows CoT can cause hallucinations in narrative content, reducing GPT-4's performance. We also introduce an Adversarial Injection method to embed trope-related text tokens into movie synopses without explicit tropes, revealing CoT's heightened sensitivity to such injections. Our comprehensive analysis provides insights for future research directions.
Context-Aware Replanning with Pre-explored Semantic Map for Object Navigation
Sep 07, 2024



Pre-explored Semantic Maps, constructed through prior exploration using visual language models (VLMs), have proven effective as foundational elements for training-free robotic applications. However, existing approaches assume the map's accuracy and do not provide effective mechanisms for revising decisions based on incorrect maps. To address this, we introduce Context-Aware Replanning (CARe), which estimates map uncertainty through confidence scores and multi-view consistency, enabling the agent to revise erroneous decisions stemming from inaccurate maps without requiring additional labels. We demonstrate the effectiveness of our proposed method by integrating it with two modern mapping backbones, VLMaps and OpenMask3D, and observe significant performance improvements in object navigation tasks. More details can be found on the project page: https://carmaps.github.io/supplements/.
Bridging Episodes and Semantics: A Novel Framework for Long-Form Video Understanding
Aug 30, 2024



While existing research often treats long-form videos as extended short videos, we propose a novel approach that more accurately reflects human cognition. This paper introduces BREASE: BRidging Episodes And SEmantics for Long-Form Video Understanding, a model that simulates episodic memory accumulation to capture action sequences and reinforces them with semantic knowledge dispersed throughout the video. Our work makes two key contributions: First, we develop an Episodic COmpressor (ECO) that efficiently aggregates crucial representations from micro to semi-macro levels. Second, we propose a Semantics reTRiever (SeTR) that enhances these aggregated representations with semantic information by focusing on the broader context, dramatically reducing feature dimensionality while preserving relevant macro-level information. Extensive experiments demonstrate that BREASE achieves state-of-the-art performance across multiple long video understanding benchmarks in both zero-shot and fully-supervised settings. The project page and code are at: https://joslefaure.github.io/assets/html/hermes.html.