 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnitude Matters: Fixing SIGNSGD Through Magnitude-Aware Sparsification in the Presence of Data Heterogeneity
Feb 19, 2023



Communication overhead has become one of the major bottlenecks in the distributed training of deep neural networks. To alleviate the concern, various gradient compression methods have been proposed, and sign-based algorithms are of surging interest. However, SIGNSGD fails to converge in the presence of data heterogeneity, which is commonly observed in the emerging federated learning (FL) paradigm. Error feedback has been proposed to address the non-convergence issue. Nonetheless, it requires the workers to locally keep track of the compression errors, which renders it not suitable for FL since the workers may not participate in the training throughout the learning process. In this paper, we propose a magnitude-driven sparsification scheme, which addresses the non-convergence issue of SIGNSGD while further improving communication efficiency. Moreover, the local update scheme is further incorporated to improve the learning performance, and the convergence of the proposed method is established. The effectiveness of the proposed scheme is validated through experiments on Fashion-MNIST, CIFAR-10, and CIFAR-100 datasets.
On the $f$-Differential Privacy Guarantees of Discrete-Valued Mechanisms
Feb 19, 2023



We consider a federated data analytics problem in which a server coordinates the collaborative data analysis of multiple users with privacy concerns and limited communication capability. The commonly adopted compression schemes introduce information loss into local data while improving communication efficiency, and it remains an open question whether such discrete-valued mechanisms provide any privacy protection. Considering that differential privacy has become the gold standard for privacy measures due to its simple implementation and rigorous theoretical foundation, in this paper, we study the privacy guarantees of discrete-valued mechanisms with finite output space in the lens of $f$-differential privacy (DP). By interpreting the privacy leakage as a hypothesis testing problem, we derive the closed-form expression of the tradeoff between type I and type II error rates, based on which the $f$-DP guarantees of a variety of discrete-valued mechanisms, including binomial mechanisms, sign-based methods, and ternary-based compressors, are characterized. We further investigate the Byzantine resilience of binomial mechanisms and ternary compressors and characterize the tradeoff among differential privacy, Byzantine resilience, and communication efficiency. Finally, we discuss the application of the proposed method to differentially private stochastic gradient descent in federated learning.
Graph Neural Networks Meet Wireless Communications: Motivation, Applications, and Future Directions
Dec 08, 2022As an efficient graph analytical tool, graph neural networks (GNNs) have special properties that are particularly fit for the characteristics and requirements of wireless communications, exhibiting good potential for the advancement of next-generation wireless communications. This article aims to provide a comprehensive overview of the interplay between GNNs and wireless communications, including GNNs for wireless communications (GNN4Com) and wireless communications for GNNs (Com4GNN). In particular, we discuss GNN4Com based on how graphical models are constructed and introduce Com4GNN with corresponding incentives. We also highlight potential research directions to promote future research endeavors for GNNs in wireless communications.
Multi-Job Intelligent Scheduling with Cross-Device Federated Learning
Nov 24, 2022



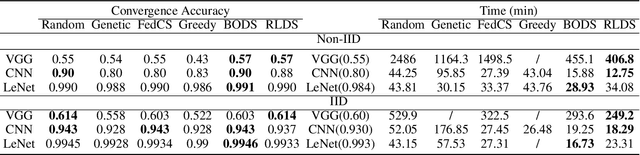
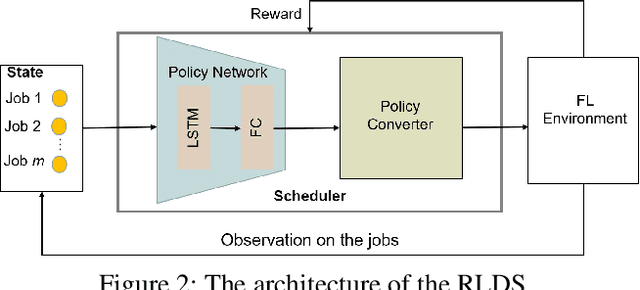
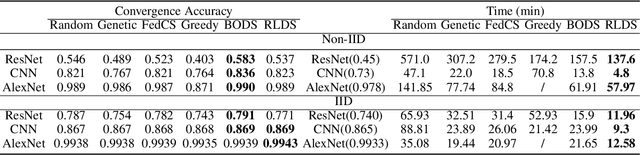
Recent years have witnessed a large amount of decentralized data in various (edge) devices of end-users, while the decentralized data aggregation remains complicated for machine learning jobs because of regulations and laws. As a practical approach to handling decentralized data, Federated Learning (FL) enables collaborative global machine learning model training without sharing sensitive raw data. The servers schedule devices to jobs within the training process of FL. In contrast, device scheduling with multiple jobs in FL remains a critical and open problem. In this paper, we propose a novel multi-job FL framework, which enables the training process of multiple jobs in parallel. The multi-job FL framework is composed of a system model and a scheduling method. The system model enables a parallel training process of multiple jobs, with a cost model based on the data fairness and the training time of diverse devices during the parallel training process. We propose a novel intelligent scheduling approach based on multiple scheduling methods, including an original reinforcement learning-based scheduling method and an original Bayesian optimization-based scheduling method, which corresponds to a small cost while scheduling devices to multiple jobs. We conduct extensive experimentation with diverse jobs and datasets. The experimental results reveal that our proposed approaches significantly outperform baseline approaches in terms of training time (up to 12.73 times faster) and accuracy (up to 46.4% higher).
Resource Constrained Vehicular Edge Federated Learning with Highly Mobile Connected Vehicles
Oct 27, 2022This paper proposes a vehicular edge federated learning (VEFL) solution, where an edge server leverages highly mobile connected vehicles' (CVs') onboard central processing units (CPUs) and local datasets to train a global model. Convergence analysis reveals that the VEFL training loss depends on the successful receptions of the CVs' trained models over the intermittent vehicle-to-infrastructure (V2I) wireless links. Owing to high mobility, in the full device participation case (FDPC), the edge server aggregates client model parameters based on a weighted combination according to the CVs' dataset sizes and sojourn periods, while it selects a subset of CVs in the partial device participation case (PDPC). We then devise joint VEFL and radio access technology (RAT) parameters optimization problems under delay, energy and cost constraints to maximize the probability of successful reception of the locally trained models. Considering that the optimization problem is NP-hard, we decompose it into a VEFL parameter optimization sub-problem, given the estimated worst-case sojourn period, delay and energy expense, and an online RAT parameter optimization sub-problem. Finally, extensive simulations are conducted to validate the effectiveness of the proposed solutions with a practical 5G new radio (5G-NR) RAT under a realistic microscopic mobility model.
Privacy-Preserving Decentralized Inference with Graph Neural Networks in Wireless Networks
Aug 15, 2022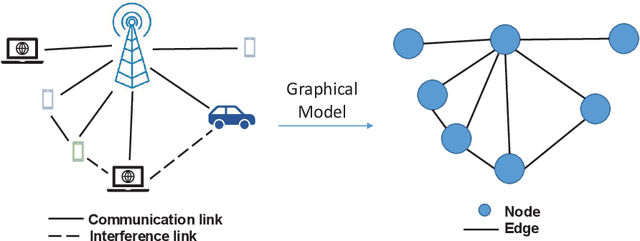
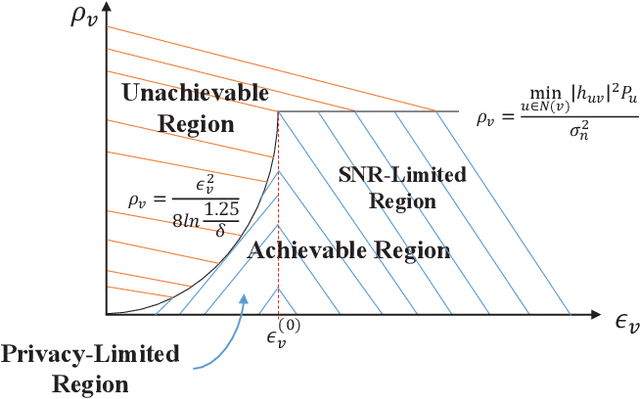
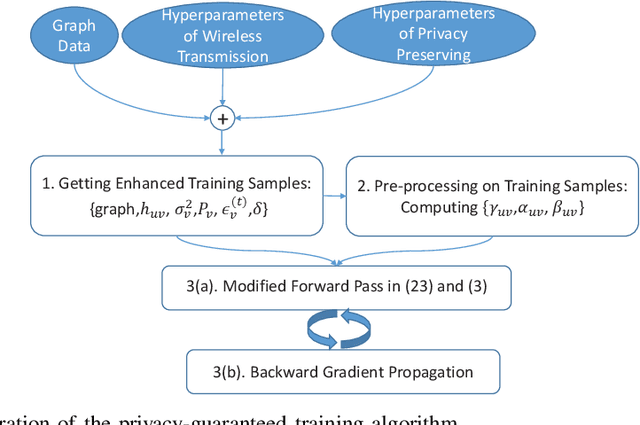
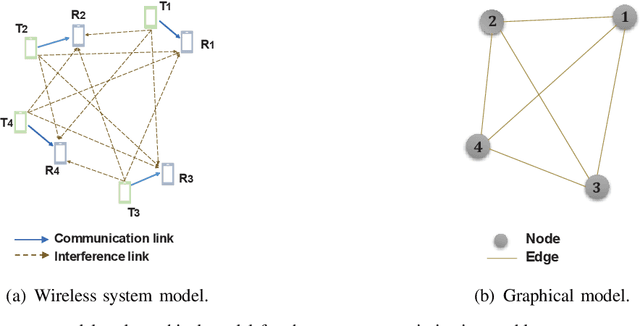
As an efficient neural network model for graph data, graph neural networks (GNNs) recently find successful applications for various wireless optimization problems. Given that the inference stage of GNNs can be naturally implemented in a decentralized manner, GNN is a potential enabler for decentralized control/management in the next-generation wireless communications. Privacy leakage, however, may occur due to the information exchanges among neighbors during decentralized inference with GNNs. To deal with this issue, in this paper, we analyze and enhance the privacy of decentralized inference with GNNs in wireless networks. Specifically, we adopt local differential privacy as the metric, and design novel privacy-preserving signals as well as privacy-guaranteed training algorithms to achieve privacy-preserving inference. We also define the SNR-privacy trade-off function to analyze the performance upper bound of decentralized inference with GNNs in wireless networks. To further enhance the communication and computation efficiency, we adopt the over-the-air computation technique and theoretically demonstrate its advantage in privacy preservation. Through extensive simulations on the synthetic graph data, we validate our theoretical analysis, verify the effectiveness of proposed privacy-preserving wireless signaling and privacy-guaranteed training algorithm, and offer some guidance on practical implementation.
Gradient Obfuscation Gives a False Sense of Security in Federated Learning
Jun 08, 2022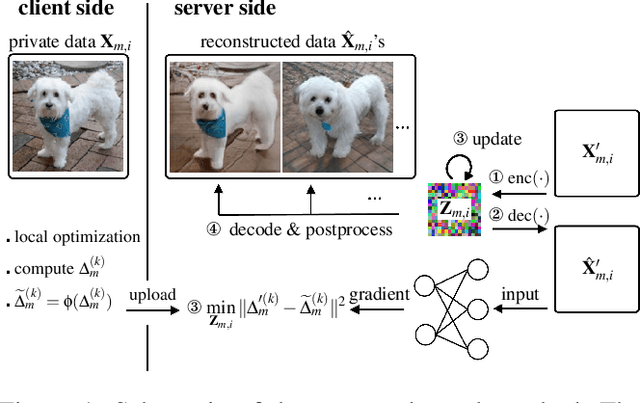
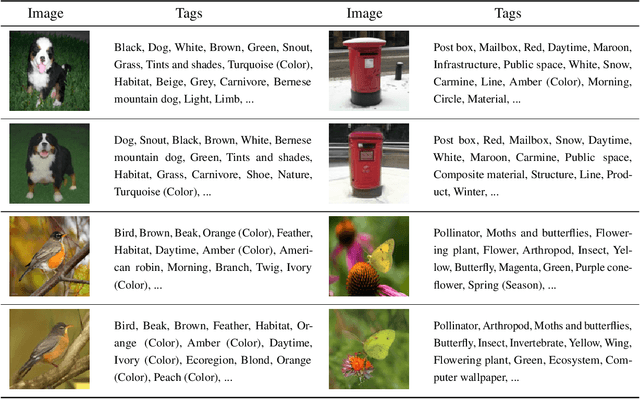
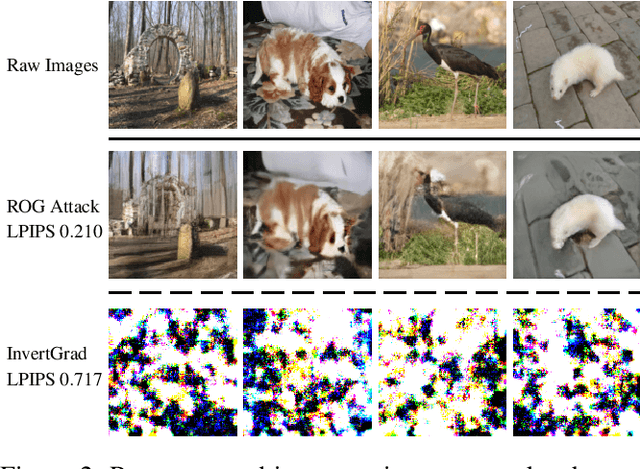
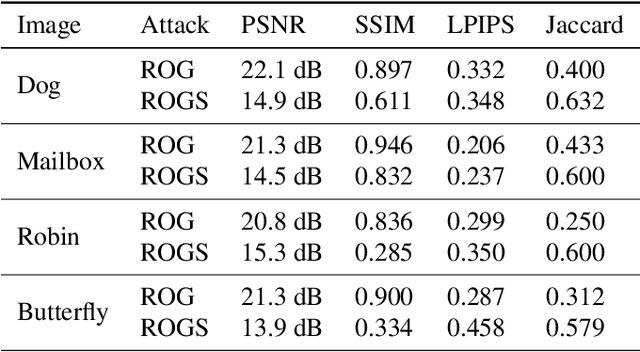
Federated learning has been proposed as a privacy-preserving machine learning framework that enables multiple clients to collaborate without sharing raw data. However, client privacy protection is not guaranteed by design in this framework. Prior work has shown that the gradient sharing strategies in federated learning can be vulnerable to data reconstruction attacks. In practice, though, clients may not transmit raw gradients considering the high communication cost or due to privacy enhancement requirements. Empirical studies have demonstrated that gradient obfuscation, including intentional obfuscation via gradient noise injection and unintentional obfuscation via gradient compression, can provide more privacy protection against reconstruction attacks. In this work, we present a new data reconstruction attack framework targeting the image classification task in federated learning. We show that commonly adopted gradient postprocessing procedures, such as gradient quantization, gradient sparsification, and gradient perturbation, may give a false sense of security in federated learning. Contrary to prior studies, we argue that privacy enhancement should not be treated as a byproduct of gradient compression. Additionally, we design a new method under the proposed framework to reconstruct the image at the semantic level. We quantify the semantic privacy leakage and compare with conventional based on image similarity scores. Our comparisons challenge the image data leakage evaluation schemes in the literature. The results emphasize the importance of revisiting and redesigning the privacy protection mechanisms for client data in existing federated learning algorithms.
Mobility, Communication and Computation Aware Federated Learning for Internet of Vehicles
May 17, 2022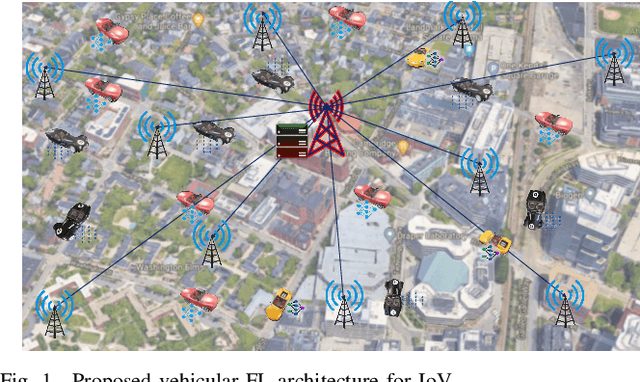
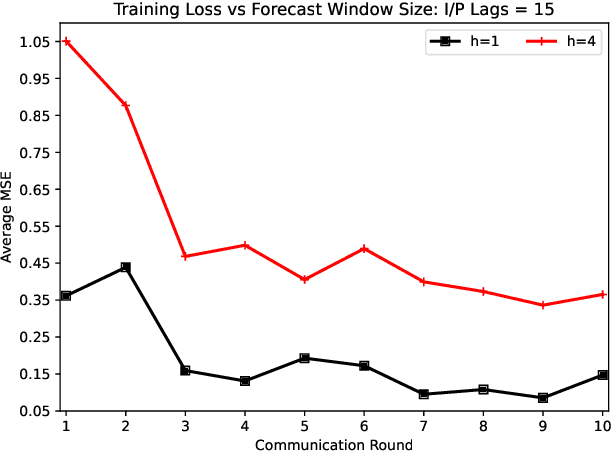
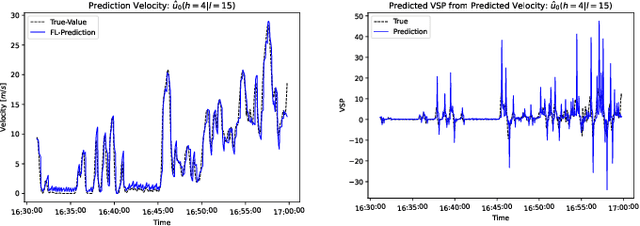
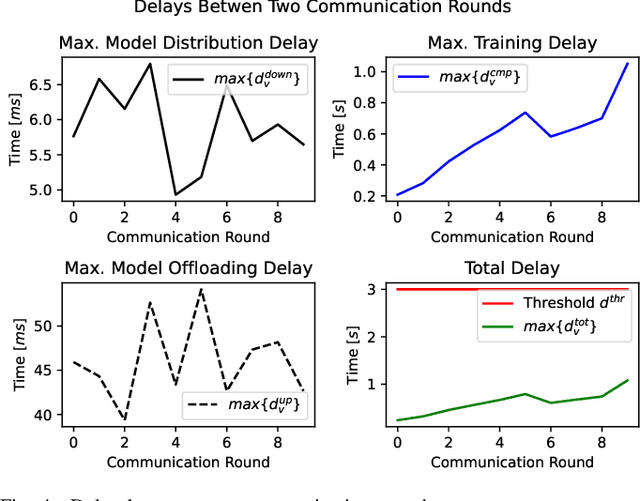
While privacy concerns entice connected and automated vehicles to incorporate on-board federated learning (FL) solutions, an integrated vehicle-to-everything communication with heterogeneous computation power aware learning platform is urgently necessary to make it a reality. Motivated by this, we propose a novel mobility, communication and computation aware online FL platform that uses on-road vehicles as learning agents. Thanks to the advanced features of modern vehicles, the on-board sensors can collect data as vehicles travel along their trajectories, while the on-board processors can train machine learning models using the collected data. To take the high mobility of vehicles into account, we consider the delay as a learning parameter and restrict it to be less than a tolerable threshold. To satisfy this threshold, the central server accepts partially trained models, the distributed roadside units (a) perform downlink multicast beamforming to minimize global model distribution delay and (b) allocate optimal uplink radio resources to minimize local model offloading delay, and the vehicle agents conduct heterogeneous local model training. Using real-world vehicle trace datasets, we validate our FL solutions. Simulation shows that the proposed integrated FL platform is robust and outperforms baseline models. With reasonable local training episodes, it can effectively satisfy all constraints and deliver near ground truth multi-horizon velocity and vehicle-specific power predictions.
FedDUAP: Federated Learning with Dynamic Update and Adaptive Pruning Using Shared Data on the Server
Apr 25, 2022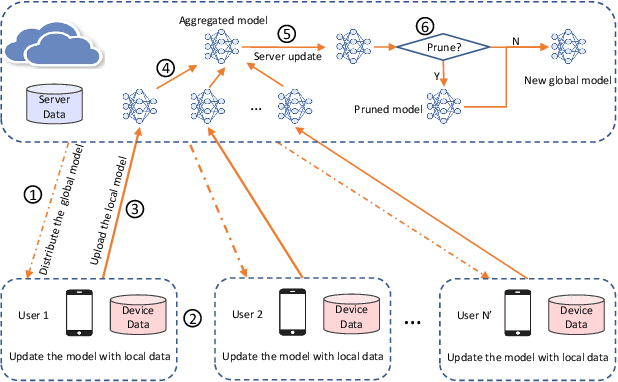
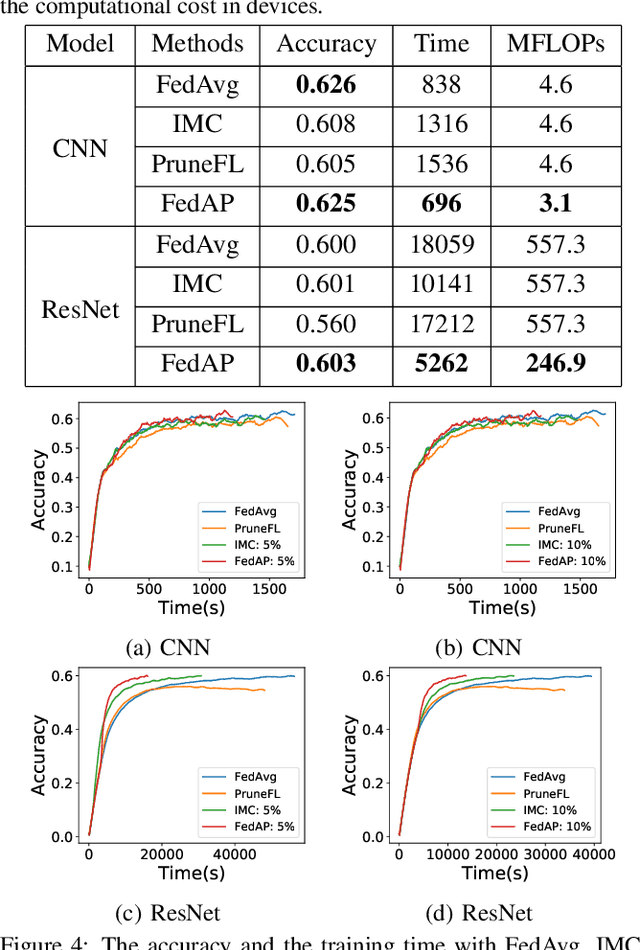
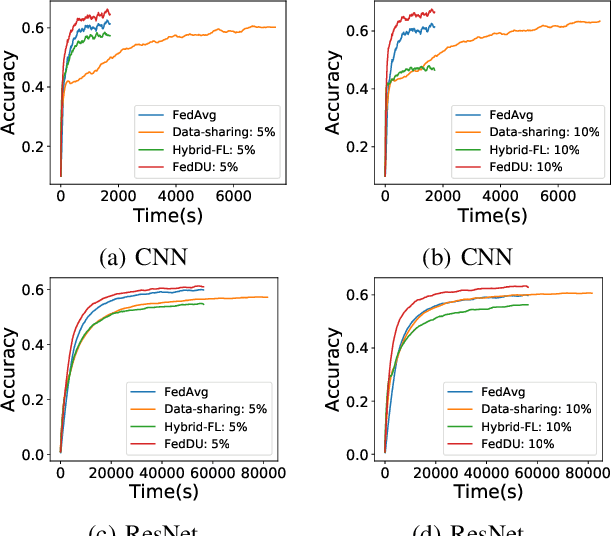
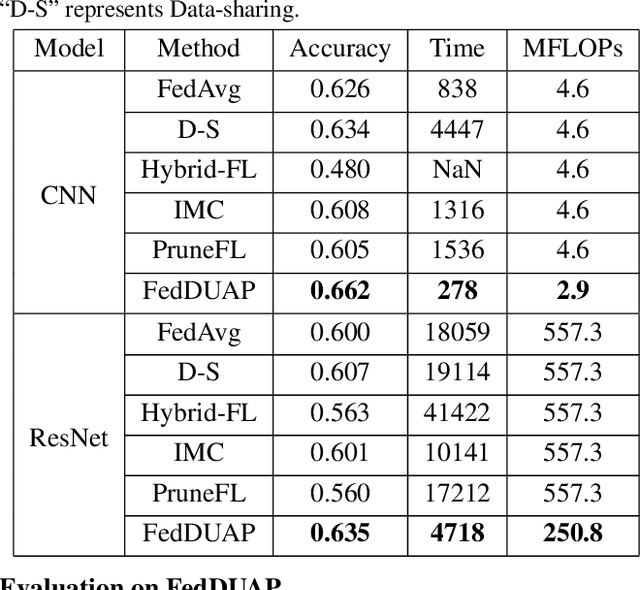
Despite achieving remarkable performance, Federated Learning (FL) suffers from two critical challenges, i.e., limited computational resources and low training efficiency. In this paper, we propose a novel FL framework, i.e., FedDUAP, with two original contributions, to exploit the insensitive data on the server and the decentralized data in edge devices to further improve the training efficiency. First, a dynamic server update algorithm is designed to exploit the insensitive data on the server, in order to dynamically determine the optimal steps of the server update for improving the convergence and accuracy of the global model. Second, a layer-adaptive model pruning method is developed to perform unique pruning operations adapted to the different dimensions and importance of multiple layers, to achieve a good balance between efficiency and effectiveness. By integrating the two original techniques together, our proposed FL model, FedDUAP, significantly outperforms baseline approaches in terms of accuracy (up to 4.8% higher), efficiency (up to 2.8 times faster), and computational cost (up to 61.9% smaller).
Efficient Device Scheduling with Multi-Job Federated Learning
Dec 15, 2021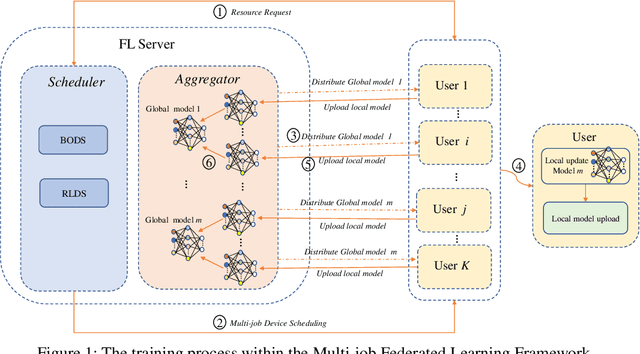
Recent years have witnessed a large amount of decentralized data in multiple (edge) devices of end-users, while the aggregation of the decentralized data remains difficult for machine learning jobs due to laws or regulations. Federated Learning (FL) emerges as an effective approach to handling decentralized data without sharing the sensitive raw data, while collaboratively training global machine learning models. The servers in FL need to select (and schedule) devices during the training process. However, the scheduling of devices for multiple jobs with FL remains a critical and open problem. In this paper, we propose a novel multi-job FL framework to enable the parallel training process of multiple jobs. The framework consists of a system model and two scheduling methods. In the system model, we propose a parallel training process of multiple jobs, and construct a cost model based on the training time and the data fairness of various devices during the training process of diverse jobs. We propose a reinforcement learning-based method and a Bayesian optimization-based method to schedule devices for multiple jobs while minimizing the cost. We conduct extensive experimentation with multiple jobs and datasets. The experimental results show that our proposed approaches significantly outperform baseline approaches in terms of training time (up to 8.67 times faster) and accuracy (up to 44.6% higher).