 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMomentum Control of an Underactuated Flying Humanoid Robot
Jun 03, 2017



The paper takes the first step towards the de- velopment of a control framework for underactuated flying humanoid robots. These robots may thus have the capacities of flight, contact locomotion, and manipulation, and benefit from technologies and methods developed for Whole-Body Control and Aerial Manipulation. As in the case of quadrotors, we as- sume that the humanoid robot is powered by four thrust forces. For convenience, these forces are placed at the robot hands and feet. The control objective is defined as the asymptotic stabilization of the robot centroidal momentum. This objective allows us to track a desired trajectory for the robot center of mass and keep small errors between a reference orientation and the robot base frame. Stability and convergence of the robot momentum are shown to be in the sense of Lyapunov. Simulations carried out on a model of the humanoid robot iCub verify the soundness of the proposed approach.
A Receding Horizon Push Recovery Strategy for Balancing the iCub Humanoid Robot
May 30, 2017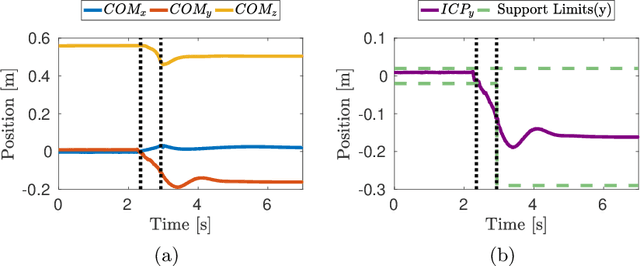
Balancing and reacting to strong and unexpected pushes is a critical requirement for humanoid robots. We recently designed a capture point based approach which interfaces with a momentum-based torque controller and we implemented and validated it on the iCub humanoid robot. In this work we implement a Receding Horizon control, also known as Model Predictive Control, to add the possibility to predict the future evolution of the robot, especially the constraints switching given by the hybrid nature of the system. We prove that the proposed MPC extension makes the step-recovery controller more robust and reliable when executing the recovery strategy. Experiments in simulation show the results of the proposed approach.
Torque-Controlled Stepping-Strategy Push Recovery: Design and Implementation on the iCub Humanoid Robot
May 30, 2017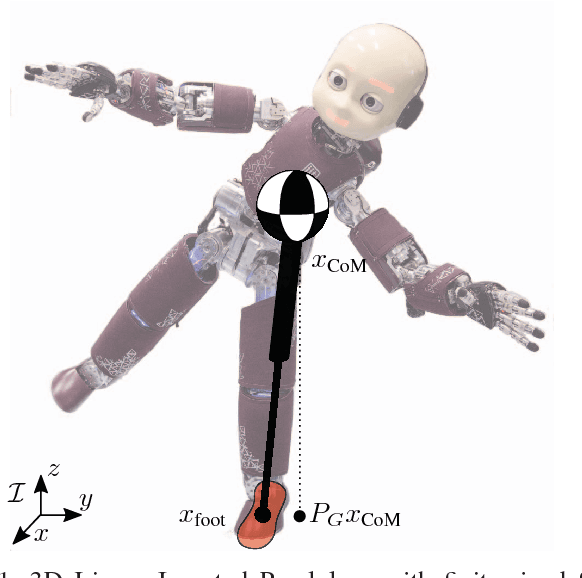
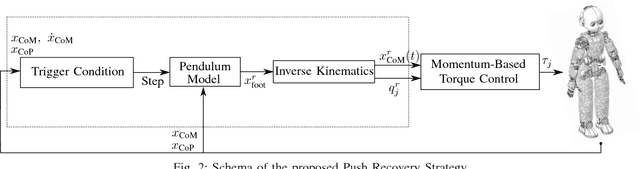
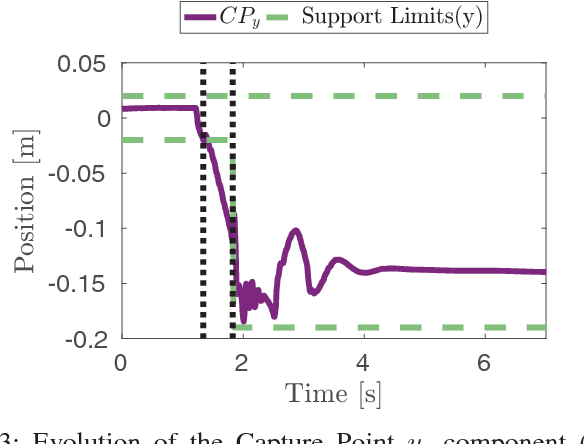
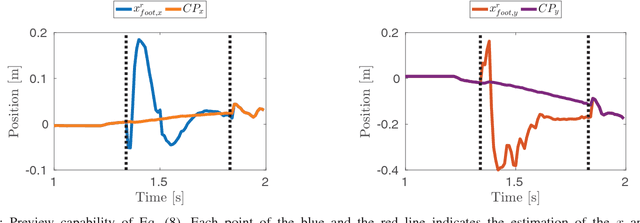
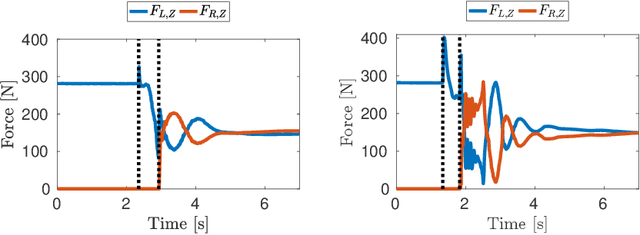
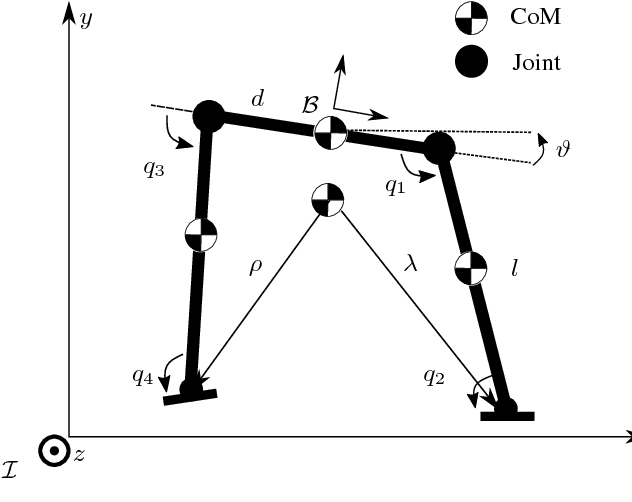
One of the challenges for the robotics community is to deploy robots which can reliably operate in real world scenarios together with humans. A crucial requirement for legged robots is the capability to properly balance on their feet, rejecting external disturbances. iCub is a state-of-the-art humanoid robot which has only recently started to balance on its feet. While the current balancing controller has proved successful in various scenarios, it still misses the capability to properly react to strong pushes by taking steps. This paper goes in this direction. It proposes and implements a control strategy based on the Capture Point concept [1]. Instead of relying on position control, like most of Capture Point related approaches, the proposed strategy generates references for the momentum-based torque controller already implemented on the iCub, thus extending its capabilities to react to external disturbances, while retaining the advantages of torque control when interacting with the environment. Experiments in the Gazebo simulator and on the iCub humanoid robot validate the proposed strategy.
The Static Center of Pressure Sensitivity: a further Criterion to assess Contact Stability and Balancing Controllers
May 29, 2017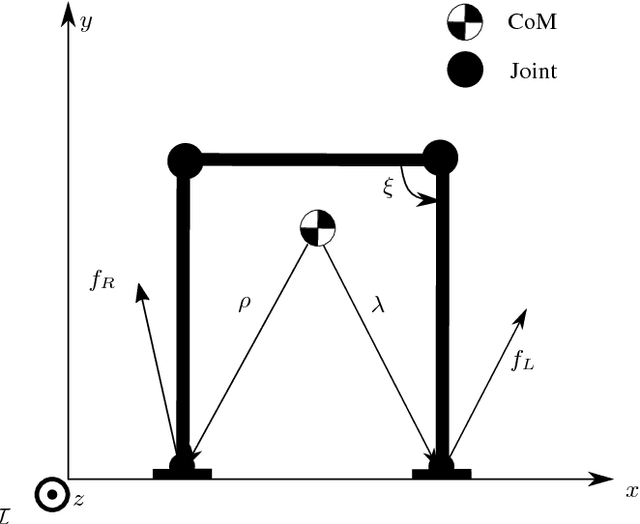
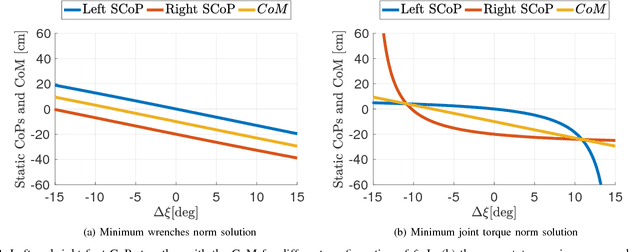
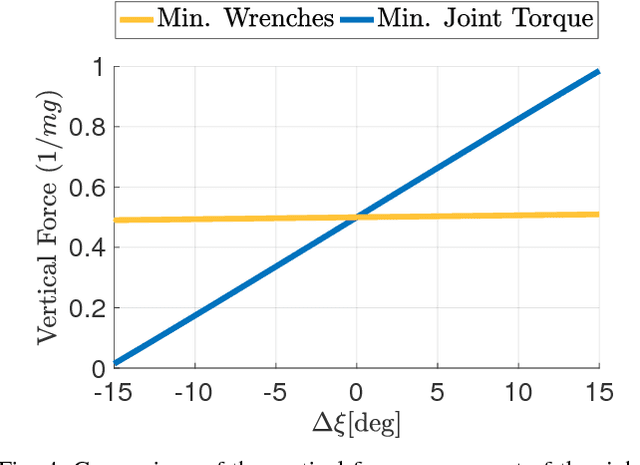
Legged locomotion has received increasing attention from the robotics community. In this respect, contact stability plays a critical role in ensuring that robots maintain balance, and it is a key element for balancing and walking controllers. The Center of Pressure is a contact stability criterion that defines a point that must be kept strictly inside the support polygon in order to ensure postural stability. In this paper, we introduce the concept of the sensitivity of the static center of pressure: roughly speaking, the rate of change of the center of pressure with respect to the system equilibrium configurations. This new concept can be used as an additional criterion to assess the robustness of the contact stability. We show how the sensitivity of the center of pressure can also be used as a metric to assess balancing controllers by considering two state-of-the-art control strategies. The analytical analysis is performed on a simplified model, and validated during balancing tasks on the iCub humanoid robot.
Inverse, forward and other dynamic computations computationally optimized with sparse matrix factorizations
May 12, 2017

We propose an algorithm to compute the dynamics of articulated rigid-bodies with different sensor distributions. Prior to the on-line computations, the proposed algorithm performs an off-line optimisation step to simplify the computational complexity of the underlying solution. This optimisation step consists in formulating the dynamic computations as a system of linear equations. The computational complexity of computing the associated solution is reduced by performing a permuted LU-factorisation with off-line optimised permutations. We apply our algorithm to solve classical dynamic problems: inverse and forward dynamics. The computational complexity of the proposed solution is compared to `gold standard' algorithms: recursive Newton-Euler and articulated body algorithm. It is shown that our algorithm reduces the number of floating point operations with respect to previous approaches. We also evaluate the numerical complexity of our algorithm by performing tests on dynamic computations for which no gold standard is available.
Momentum Control of Humanoid Robots with Series Elastic Actuators
Mar 06, 2017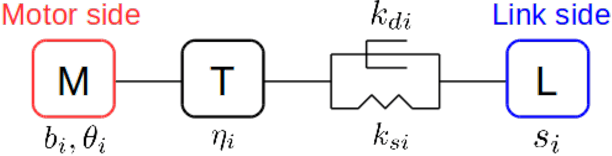
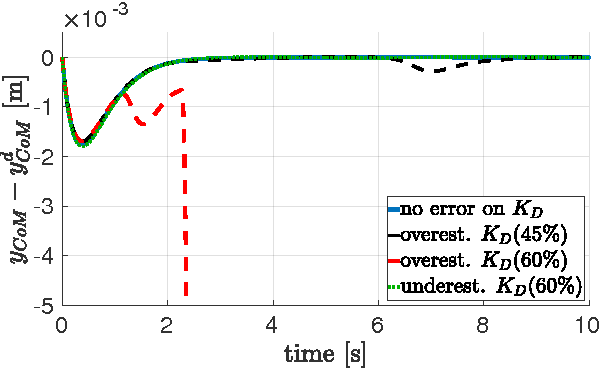
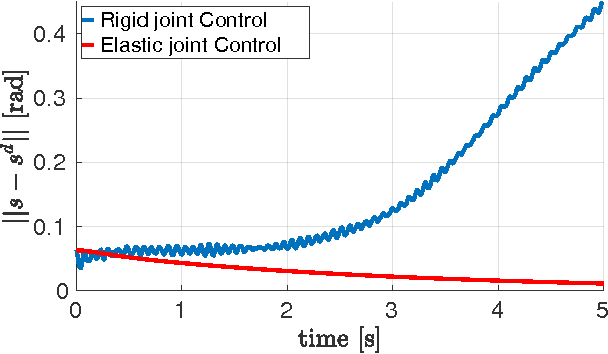
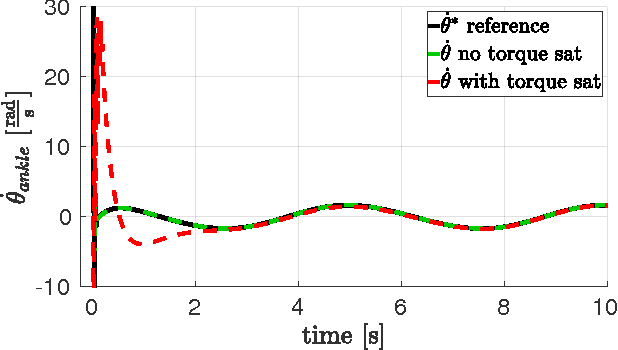
Humanoid robots may require a degree of compliance at the joint level for improving efficiency, shock tolerance, and safe interaction with humans. The presence of joint elasticity, however, complexifies the design of balancing and walking controllers. This paper proposes a control framework for extending momentum based controllers developed for stiff actuators to the case of series elastic actuators. The key point is to consider the motor velocities as an intermediate control input, and then apply high-gain control to stabilise the desired motor velocities achieving momentum control. Simulations carried out on a model of the robot iCub verify the soundness of the proposed approach.
Walking on Partial Footholds Including Line Contacts with the Humanoid Robot Atlas
Jan 12, 2017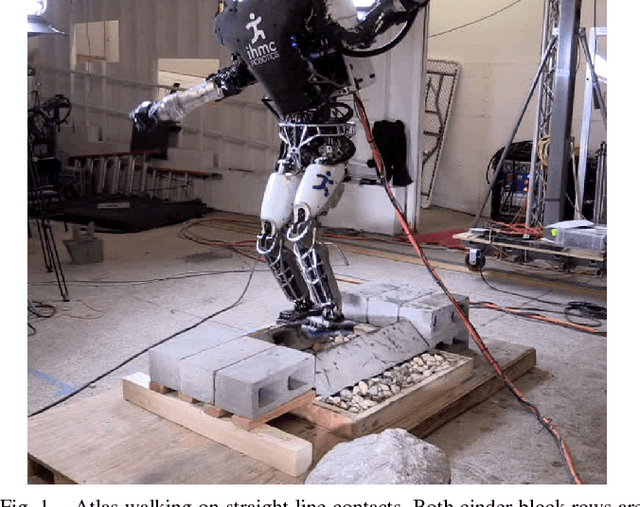

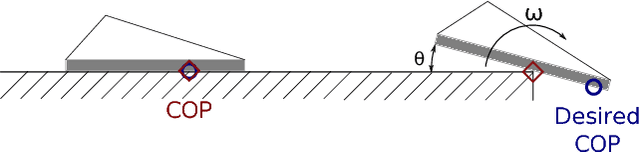
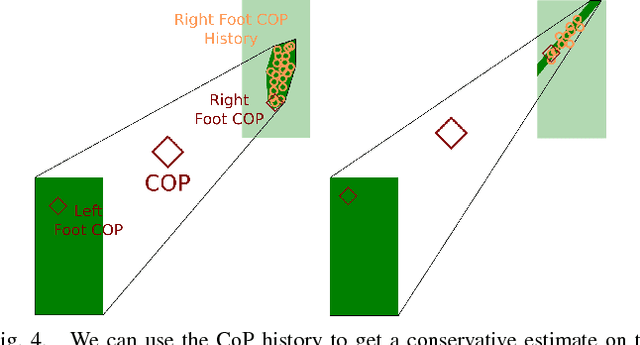
We present a method for humanoid robot walking on partial footholds such as small stepping stones and rocks with sharp surfaces. Our algorithm does not rely on prior knowledge of the foothold, but information about an expected foothold can be used to improve the stepping performance. After a step is taken, the robot explores the new contact surface by attempting to shift the center of pressure around the foot. The available foothold is inferred by the way in which the foot rotates about contact edges and/or by the achieved center of pressure locations on the foot during exploration. This estimated contact area is then used by a whole body momentum-based control algorithm. To walk and balance on partial footholds, we combine fast, dynamic stepping with the use of upper body angular momentum to regain balance. We applied this method to the Atlas humanoid designed by Boston Dynamics to walk over small contact surfaces, such as line and point contacts. We present experimental results and discuss performance limitations.
On Centroidal Dynamics and Integrability of Average Angular Velocity
Jan 10, 2017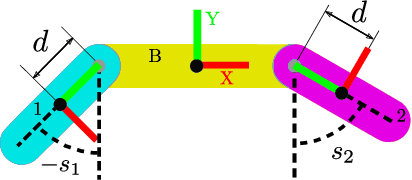
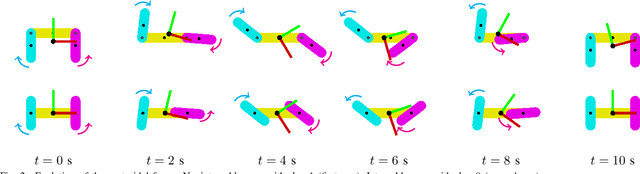
In the literature on robotics and multibody dynamics, the concept of average angular velocity has received considerable attention in recent years. We address the question of whether the average angular velocity defines an orientation framethat depends only on the current robot configuration and provide a simple algebraic condition to check whether this holds. In the language of geometric mechanics, this condition corresponds to requiring the flatness of the mechanical connection associated to the robotic system. Here, however, we provide both a reinterpretation and a proof of this result accessible to readers with a background in rigid body kinematics and multibody dynamics but not necessarily acquainted with differential geometry, still providing precise links to the geometric mechanics literature. This should help spreading the algebraic condition beyond the scope of geometric mechanics,contributing to a proper utilization and understanding of the concept of average angular velocity.
A Whole-Body Software Abstraction layer for Control Design of free-floating Mechanical Systems
Jan 04, 2017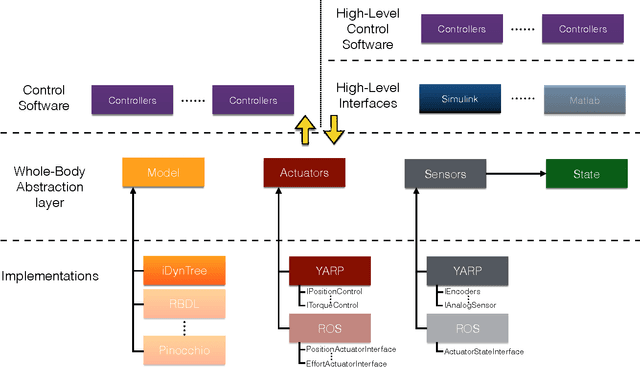
In this paper, we propose a software abstraction layer to simplify the design and synthesis of whole-body controllers without making any preliminary assumptions on the control law to be implemented. The main advantage of the proposed library is the decoupling of the control software from implementation details, which are related to the robotic platform. Furthermore, the resulting code is more clean and concise than ad-hoc code, as it focuses only on the implementation of the control law. In addition, we present a reference implementation of the abstraction layer together with a Simulink interface to provide support to Model-Driven based development. We also show the implementation of a simple proportional-derivative plus gravity compensation control together with a more complex momentum-based bipedal balance controller.
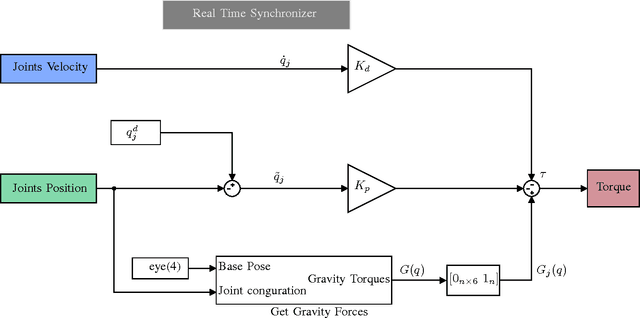
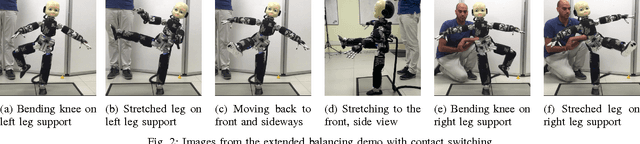
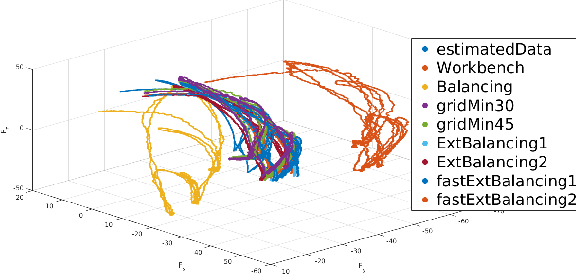
Model Based In Situ Calibration of Six Axis Force Torque Sensors
Oct 27, 2016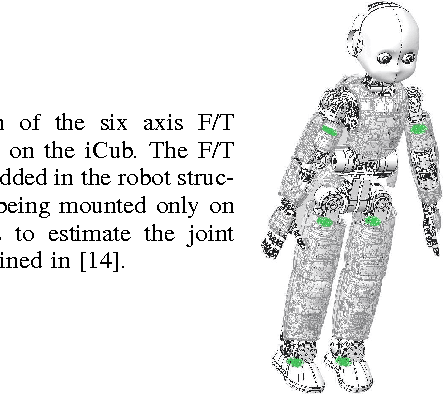
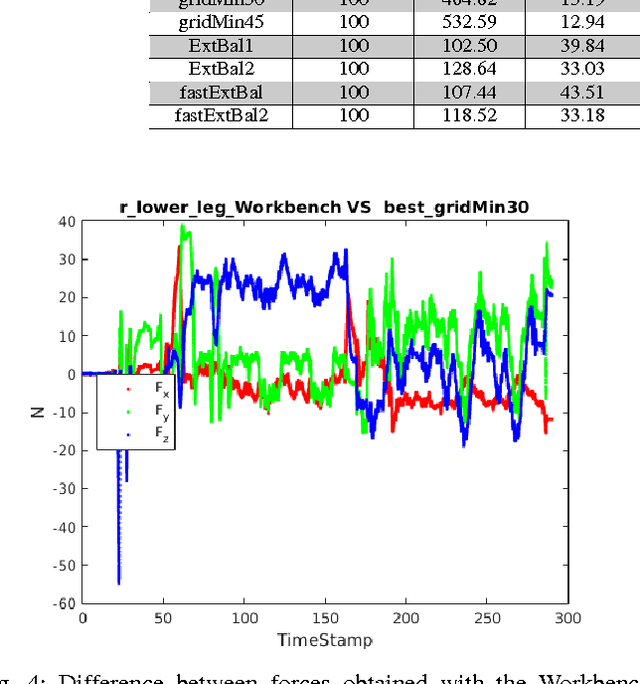
This paper proposes and validates an in situ calibration method to calibrate six axis force torque (F/T) sensors once they are mounted on the system. This procedure takes advantage of the knowledge of the model of the robot to generate the expected wrenches of the sensors during some arbitrary motions. It then uses this information to train and validate new calibration matrices, taking into account the calibration matrix obtained with a classical Workbench calibration. The proposed calibration algorithm is validated on the F/T sensors mounted on the iCub humanoid robot legs.