 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalking of the iCub humanoid robot in different scenarios: implementation and performance analysis
Jul 17, 2017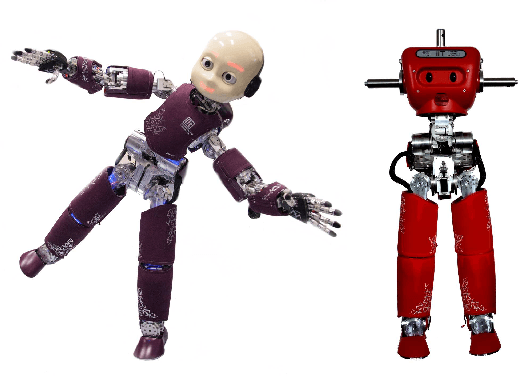
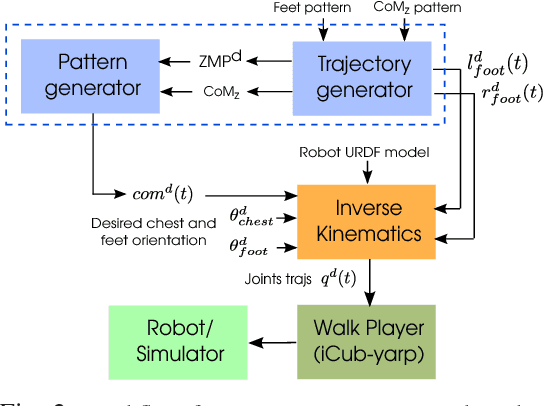
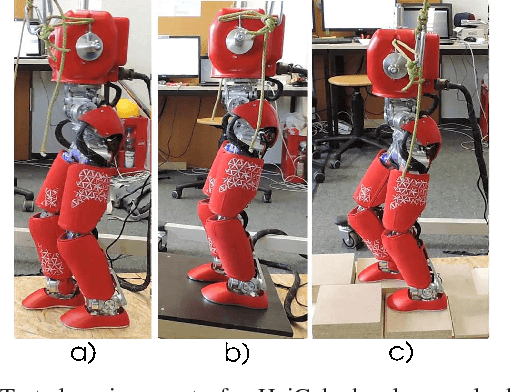
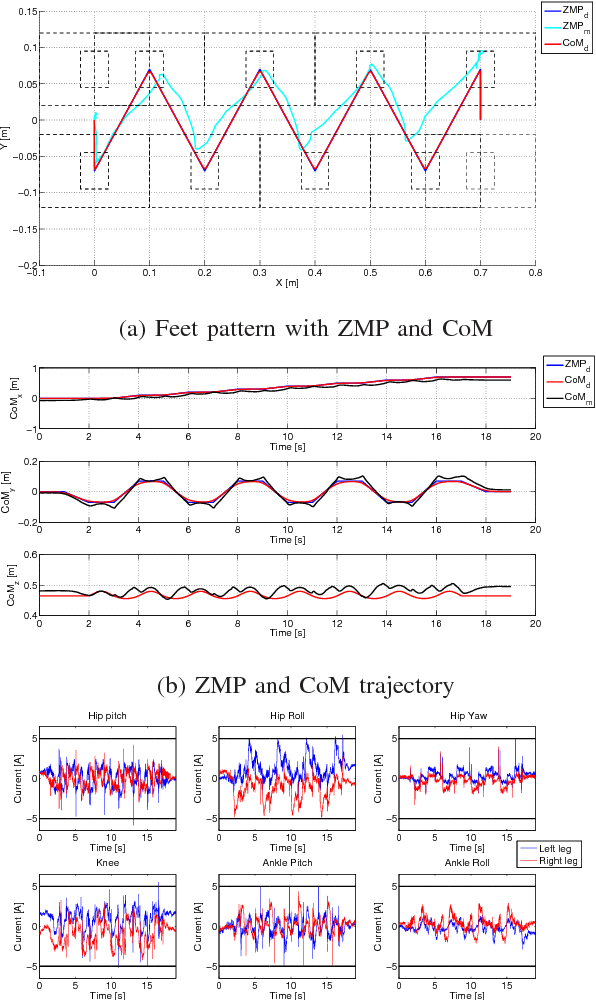
The humanoid robot iCub is a research platform of the Fondazione Istituto Italiano di Tecnologia (IIT), spread among different institutes around the world. In the most recent version of iCub, the robot is equipped with stronger legs and bigger feet, allowing it to perform balancing and walking motions that were not possible with the first generations. Despite the new legs hardware, walking has been rarely performed on the iCub robot. In this work the objective is to implement walking motions on the robot, from which we want to analyze its walking capabilities. We developed software modules based on extensions of classic techniques such as the ZMP based pattern generator and position control to identify which are the characteristics as well as limitations of the robot against different walking tasks in order to give the users a reference of the performance of the robot. Most of the experiments have been performed with HeiCub, a reduced version of iCub without arms and head.
A Whole-Body Software Abstraction layer for Control Design of free-floating Mechanical Systems
Jan 04, 2017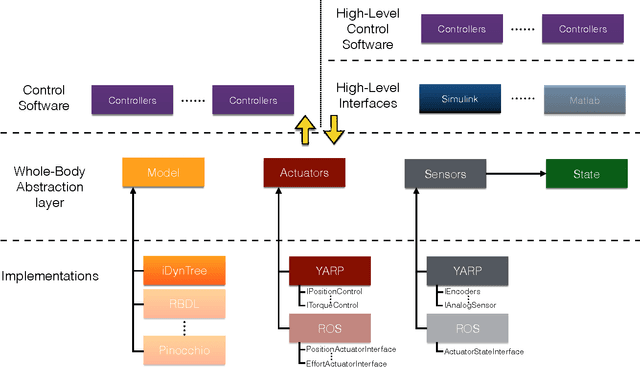
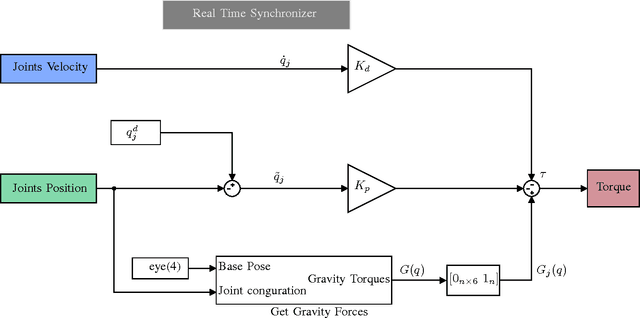
In this paper, we propose a software abstraction layer to simplify the design and synthesis of whole-body controllers without making any preliminary assumptions on the control law to be implemented. The main advantage of the proposed library is the decoupling of the control software from implementation details, which are related to the robotic platform. Furthermore, the resulting code is more clean and concise than ad-hoc code, as it focuses only on the implementation of the control law. In addition, we present a reference implementation of the abstraction layer together with a Simulink interface to provide support to Model-Driven based development. We also show the implementation of a simple proportional-derivative plus gravity compensation control together with a more complex momentum-based bipedal balance controller.