 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantics for Robotic Mapping, Perception and Interaction: A Survey
Jan 02, 2021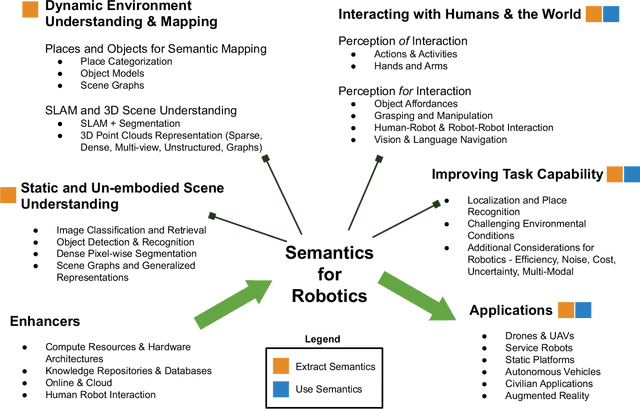
For robots to navigate and interact more richly with the world around them, they will likely require a deeper understanding of the world in which they operate. In robotics and related research fields, the study of understanding is often referred to as semantics, which dictates what does the world "mean" to a robot, and is strongly tied to the question of how to represent that meaning. With humans and robots increasingly operating in the same world, the prospects of human-robot interaction also bring semantics and ontology of natural language into the picture. Driven by need, as well as by enablers like increasing availability of training data and computational resources, semantics is a rapidly growing research area in robotics. The field has received significant attention in the research literature to date, but most reviews and surveys have focused on particular aspects of the topic: the technical research issues regarding its use in specific robotic topics like mapping or segmentation, or its relevance to one particular application domain like autonomous driving. A new treatment is therefore required, and is also timely because so much relevant research has occurred since many of the key surveys were published. This survey therefore provides an overarching snapshot of where semantics in robotics stands today. We establish a taxonomy for semantics research in or relevant to robotics, split into four broad categories of activity, in which semantics are extracted, used, or both. Within these broad categories we survey dozens of major topics including fundamentals from the computer vision field and key robotics research areas utilizing semantics, including mapping, navigation and interaction with the world. The survey also covers key practical considerations, including enablers like increased data availability and improved computational hardware, and major application areas where...
* 81 pages, 1 figure, published in Foundations and Trends in Robotics, 2020
EGAD! an Evolved Grasping Analysis Dataset for diversity and reproducibility in robotic manipulation
Mar 03, 2020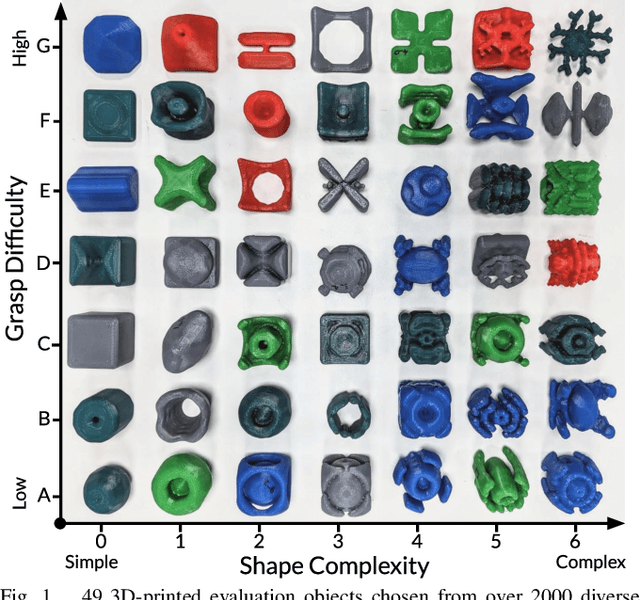

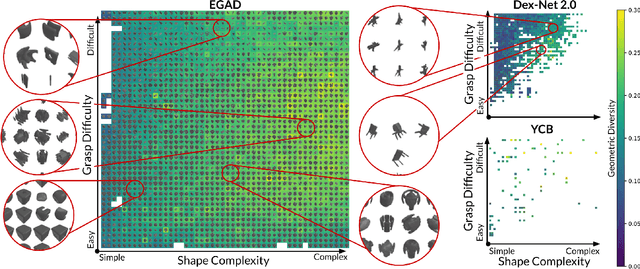
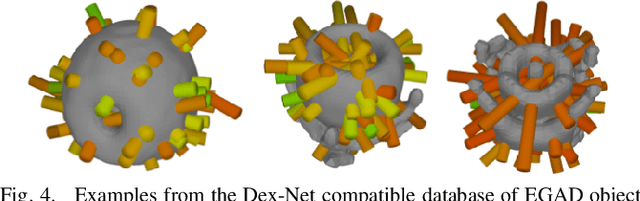
We present the Evolved Grasping Analysis Dataset (EGAD), comprising over 2000 generated objects aimed at training and evaluating robotic visual grasp detection algorithms. The objects in EGAD are geometrically diverse, filling a space ranging from simple to complex shapes and from easy to difficult to grasp, compared to other datasets for robotic grasping, which may be limited in size or contain only a small number of object classes. Additionally, we specify a set of 49 diverse 3D-printable evaluation objects to encourage reproducible testing of robotic grasping systems across a range of complexity and difficulty. The dataset, code and videos can be found at https://dougsm.github.io/egad/
Multi-View Picking: Next-best-view Reaching for Improved Grasping in Clutter
Sep 23, 2018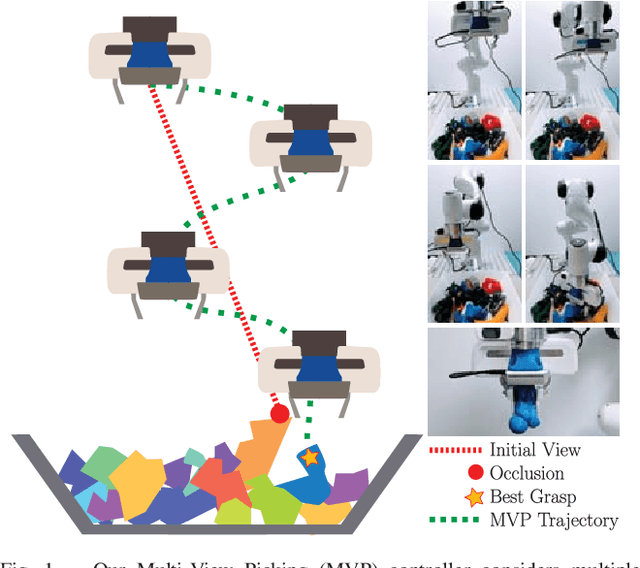
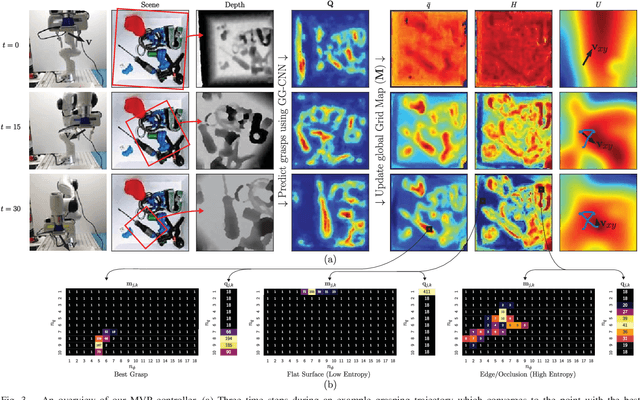
Camera viewpoint selection is an important aspect of visual grasp detection, especially in clutter where many occlusions are present. Where other approaches use a static camera position or fixed data collection routines, our Multi-View Picking (MVP) controller uses an active perception approach to choose informative viewpoints based directly on a distribution of grasp pose estimates in real time, reducing uncertainty in the grasp poses caused by clutter and occlusions. In trials of grasping 20 objects from clutter, our MVP controller achieves 80% grasp success, outperforming a single-viewpoint grasp detector by 12%. We also show that our approach is both more accurate and more efficient than approaches which consider multiple fixed viewpoints.
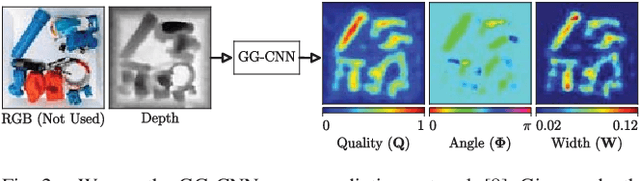
Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach
May 15, 2018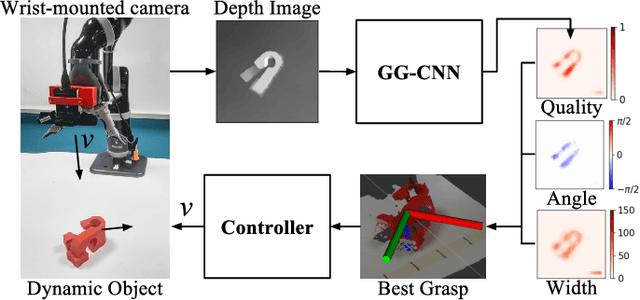
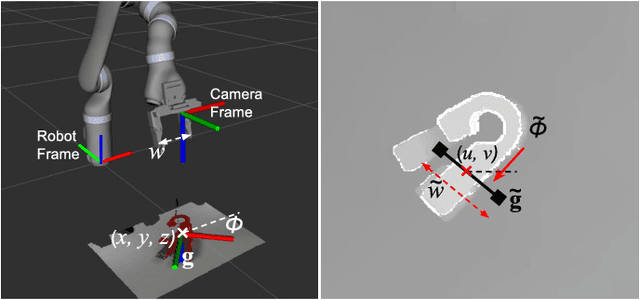
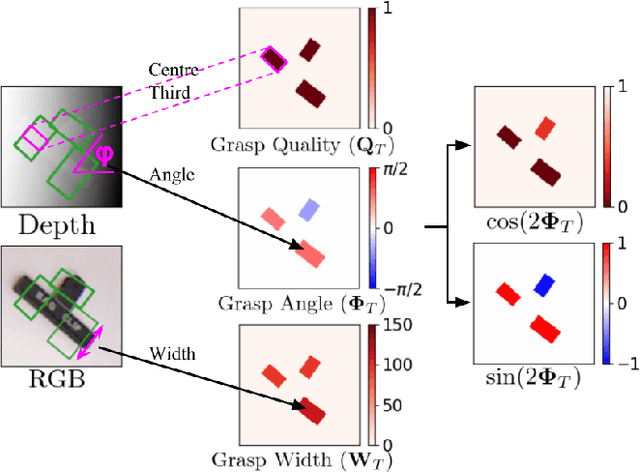
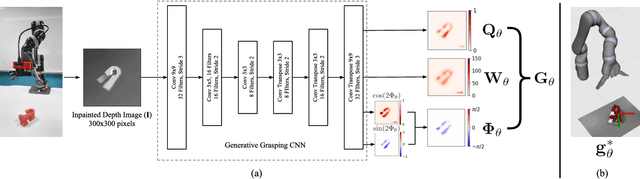
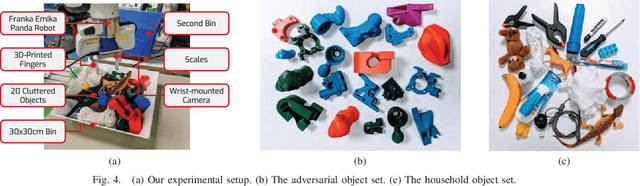
This paper presents a real-time, object-independent grasp synthesis method which can be used for closed-loop grasping. Our proposed Generative Grasping Convolutional Neural Network (GG-CNN) predicts the quality and pose of grasps at every pixel. This one-to-one mapping from a depth image overcomes limitations of current deep-learning grasping techniques by avoiding discrete sampling of grasp candidates and long computation times. Additionally, our GG-CNN is orders of magnitude smaller while detecting stable grasps with equivalent performance to current state-of-the-art techniques. The light-weight and single-pass generative nature of our GG-CNN allows for closed-loop control at up to 50Hz, enabling accurate grasping in non-static environments where objects move and in the presence of robot control inaccuracies. In our real-world tests, we achieve an 83% grasp success rate on a set of previously unseen objects with adversarial geometry and 88% on a set of household objects that are moved during the grasp attempt. We also achieve 81% accuracy when grasping in dynamic clutter.