 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLDX-1 Technical Report
May 05, 2026While Vision-Language-Action models (VLAs) have shown remarkable progress toward human-like generalist robotic policies through the versatile intelligence (i.e. broad scene understanding and language-conditioned generalization) inherited from pre-trained Vision-Language Models, they still struggle with complex real-world tasks requiring broader functional capabilities (e.g. motion awareness, memory-aware decision making, and physical sensing). To address this, we introduce RLDX-1, a general-purpose robotic policy for dexterous manipulation built on the Multi-Stream Action Transformer (MSAT), an architecture that unifies these capabilities by integrating heterogeneous modalities through modality-specific streams with cross-modal joint self-attention. RLDX-1 further combines this architecture with system-level design choices, including synthesizing training data for rare manipulation scenarios, learning procedures specialized for human-like manipulation, and inference optimizations for real-time deployment. Through empirical evaluation, we show that RLDX-1 consistently outperforms recent frontier VLAs (e.g. $π_{0.5}$ and GR00T N1.6) across both simulation benchmarks and real-world tasks that require broad functional capabilities beyond general versatility. In particular, RLDX-1 shows superiority in ALLEX humanoid tasks by achieving success rates of 86.8% while $π_{0.5}$ and GR00T N1.6 achieve around 40%, highlighting the ability of RLDX-1 to control a high-DoF humanoid robot under diverse functional demands. Together, these results position RLDX-1 as a promising step toward reliable VLAs for complex, contact-rich, and dynamic real-world dexterous manipulation.
RawGen: Learning Camera Raw Image Generation
Mar 31, 2026Cameras capture scene-referred linear raw images, which are processed by onboard image signal processors (ISPs) into display-referred 8-bit sRGB outputs. Although raw data is more faithful for low-level vision tasks, collecting large-scale raw datasets remains a major bottleneck, as existing datasets are limited and tied to specific camera hardware. Generative models offer a promising way to address this scarcity -- however, existing diffusion frameworks are designed to synthesize photo-finished sRGB images rather than physically consistent linear representations. This paper presents RawGen, to our knowledge the first diffusion-based framework enabling text-to-raw generation for arbitrary target cameras, alongside sRGB-to-raw inversion. RawGen leverages the generative priors of large-scale sRGB diffusion models to synthesize physically meaningful linear outputs, such as CIE XYZ or camera-specific raw representations, via specialized processing in latent and pixel spaces. To handle unknown and diverse ISP pipelines and photo-finishing effects in diffusion-model training data, we build a many-to-one inverse-ISP dataset where multiple sRGB renditions of the same scene generated using diverse ISP parameters are anchored to a common scene-referred target. Fine-tuning a conditional denoiser and specialized decoder on this dataset allows RawGen to obtain camera-centric linear reconstructions that effectively invert the rendering pipeline. We demonstrate RawGen's superior performance over traditional inverse-ISP methods that assume a fixed ISP. Furthermore, we show that augmenting training pipelines with RawGen's scalable, text-driven synthetic data can benefit downstream low-level vision tasks.
SpatialBoost: Enhancing Visual Representation through Language-Guided Reasoning
Mar 23, 2026Despite the remarkable success of large-scale pre-trained image representation models (i.e., vision encoders) across various vision tasks, they are predominantly trained on 2D image data and therefore often fail to capture 3D spatial relationships between objects and backgrounds in the real world, constraining their effectiveness in many downstream applications. To address this, we propose SpatialBoost, a scalable framework that enhances the spatial awareness of existing pre-trained vision encoders by injecting 3D spatial knowledge expressed in linguistic descriptions. The core idea involves converting dense 3D spatial information from 2D images into linguistic expressions, which is then used to inject such spatial knowledge into vision encoders through a Large Language Model (LLM). To this end, we adopt a multi-turn Chain-of-Thought (CoT) reasoning process that progressively incorporates dense spatial knowledge and builds hierarchical spatial understanding. To validate effectiveness, we adapt SpatialBoost to state-of-the-art vision encoders such as DINOv3, and evaluate its performance gains on a wide range of benchmarks requiring both 3D perception and general vision abilities. For instance, SpatialBoost improves DINOv3 performance from 55.9 to 59.7 mIoU on ADE20K, achieving state-of-the-art performance with 3.8% gain over the pre-trained DINOv3.
RoboAlign: Learning Test-Time Reasoning for Language-Action Alignment in Vision-Language-Action Models
Mar 22, 2026Improving embodied reasoning in multimodal-large-language models (MLLMs) is essential for building vision-language-action models (VLAs) on top of them to readily translate multimodal understanding into low-level actions. Accordingly, recent work has explored enhancing embodied reasoning in MLLMs through supervision of vision-question-answering type. However, these approaches have been reported to result in unstable VLA performance, often yielding only marginal or even negative gains. In this paper, we propose a more systematic MLLM training framework RoboAlign that reliably improves VLA performance. Our key idea is to sample action tokens via zero-shot natural language reasoning and refines this reasoning using reinforcement learning (RL) to improve action accuracy. As a result, RoboAlign bridges the modality gap between language and low-level actions in MLLMs, and facilitate knowledge transfer from MLLM to VLA. To validate the effectiveness of RoboAlign, we train VLAs by adding a diffusion-based action head on top of an MLLM backbone and evaluate them on major robotics benchmarks. Remarkably, by performing RL-based alignment after SFT using less than 1\% of the data, RoboAlign achieves performance improvements of 17.5\%, 18.9\%, and 106.6\% over SFT baselines on LIBERO, CALVIN, and real-world environments, respectively.
From Street to Orbit: Training-Free Cross-View Retrieval via Location Semantics and LLM Guidance
Nov 12, 2025Cross-view image retrieval, particularly street-to-satellite matching, is a critical task for applications such as autonomous navigation, urban planning, and localization in GPS-denied environments. However, existing approaches often require supervised training on curated datasets and rely on panoramic or UAV-based images, which limits real-world deployment. In this paper, we present a simple yet effective cross-view image retrieval framework that leverages a pretrained vision encoder and a large language model (LLM), requiring no additional training. Given a monocular street-view image, our method extracts geographic cues through web-based image search and LLM-based location inference, generates a satellite query via geocoding API, and retrieves matching tiles using a pretrained vision encoder (e.g., DINOv2) with PCA-based whitening feature refinement. Despite using no ground-truth supervision or finetuning, our proposed method outperforms prior learning-based approaches on the benchmark dataset under zero-shot settings. Moreover, our pipeline enables automatic construction of semantically aligned street-to-satellite datasets, which is offering a scalable and cost-efficient alternative to manual annotation. All source codes will be made publicly available at https://jeonghomin.github.io/street2orbit.github.io/.
Dual-Stream Diffusion for World-Model Augmented Vision-Language-Action Model
Oct 31, 2025Recently, augmenting Vision-Language-Action models (VLAs) with world modeling has shown promise in improving robotic policy learning. However, it remains challenging to jointly predict next-state observations and action sequences because of the inherent difference between the two modalities. To address this, we propose DUal-STream diffusion (DUST), a world-model augmented VLA framework that handles the modality conflict and enhances the performance of VLAs across diverse tasks. Specifically, we propose a multimodal diffusion transformer architecture that explicitly maintains separate modality streams while still enabling cross-modal knowledge sharing. In addition, we introduce independent noise perturbations for each modality and a decoupled flow-matching loss. This design enables the model to learn the joint distribution in a bidirectional manner while avoiding the need for a unified latent space. Based on the decoupling of modalities during training, we also introduce a joint sampling method that supports test-time scaling, where action and vision tokens evolve asynchronously at different rates. Through experiments on simulated benchmarks such as RoboCasa and GR-1, DUST achieves up to 6% gains over baseline methods, while our test-time scaling approach provides an additional 2-5% boost. On real-world tasks with the Franka Research 3, DUST improves success rates by 13%, confirming its effectiveness beyond simulation. Furthermore, pre-training on action-free videos from BridgeV2 yields significant transfer gains on RoboCasa, underscoring DUST's potential for large-scale VLA pretraining.
Contrastive Representation Regularization for Vision-Language-Action Models
Oct 02, 2025Vision-Language-Action (VLA) models have shown its capabilities in robot manipulation by leveraging rich representations from pre-trained Vision-Language Models (VLMs). However, their representations arguably remain suboptimal, lacking sensitivity to robotic signals such as control actions and proprioceptive states. To address the issue, we introduce Robot State-aware Contrastive Loss (RS-CL), a simple and effective representation regularization for VLA models, designed to bridge the gap between VLM representations and robotic signals. In particular, RS-CL aligns the representations more closely with the robot's proprioceptive states, by using relative distances between the states as soft supervision. Complementing the original action prediction objective, RS-CL effectively enhances control-relevant representation learning, while being lightweight and fully compatible with standard VLA training pipeline. Our empirical results demonstrate that RS-CL substantially improves the manipulation performance of state-of-the-art VLA models; it pushes the prior art from 30.8% to 41.5% on pick-and-place tasks in RoboCasa-Kitchen, through more accurate positioning during grasping and placing, and boosts success rates from 45.0% to 58.3% on challenging real-robot manipulation tasks.
Collaborative LLM Inference via Planning for Efficient Reasoning
Jun 13, 2025



Large language models (LLMs) excel at complex reasoning tasks, but those with strong capabilities (e.g., whose numbers of parameters are larger than 100B) are often accessible only through paid APIs, making them too costly for applications of frequent use. In contrast, smaller open-sourced LLMs (e.g., whose numbers of parameters are less than 3B) are freely available and easy to deploy locally (e.g., under a single GPU having 8G VRAM), but lack suff icient reasoning ability. This trade-off raises a natural question: can small (free) and large (costly) models collaborate at test time to combine their strengths? We propose a test-time collaboration framework in which a planner model first generates a plan, defined as a distilled and high-level abstraction of the problem. This plan serves as a lightweight intermediate that guides a reasoner model, which generates a complete solution. Small and large models take turns acting as planner and reasoner, exchanging plans in a multi-round cascade to collaboratively solve complex tasks. Our method achieves accuracy comparable to strong proprietary models alone, while significantly reducing reliance on paid inference. These results highlight planning as an effective prior for orchestrating cost-aware, cross-model inference under real-world deployment constraints.
ORIDa: Object-centric Real-world Image Composition Dataset
Jun 10, 2025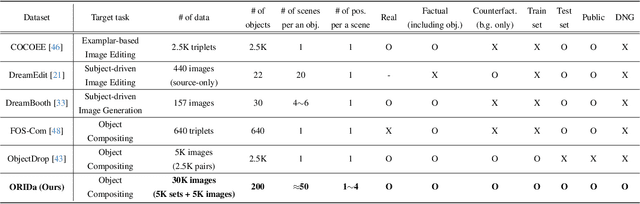
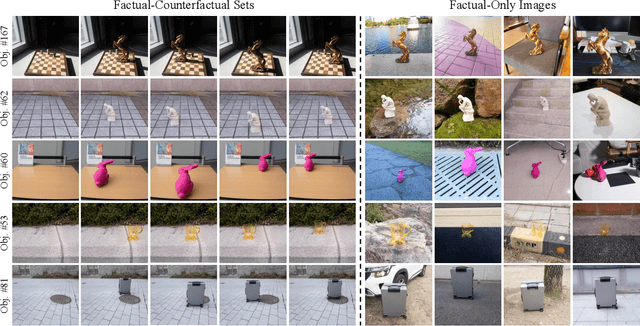
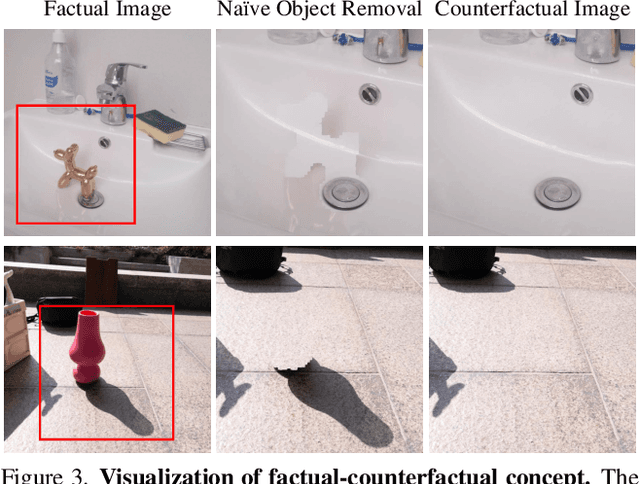
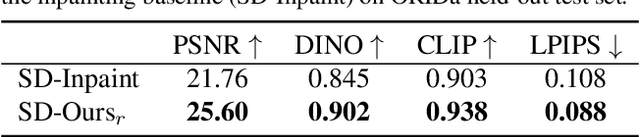
Object compositing, the task of placing and harmonizing objects in images of diverse visual scenes, has become an important task in computer vision with the rise of generative models. However, existing datasets lack the diversity and scale required to comprehensively explore real-world scenarios. We introduce ORIDa (Object-centric Real-world Image Composition Dataset), a large-scale, real-captured dataset containing over 30,000 images featuring 200 unique objects, each of which is presented across varied positions and scenes. ORIDa has two types of data: factual-counterfactual sets and factual-only scenes. The factual-counterfactual sets consist of four factual images showing an object in different positions within a scene and a single counterfactual (or background) image of the scene without the object, resulting in five images per scene. The factual-only scenes include a single image containing an object in a specific context, expanding the variety of environments. To our knowledge, ORIDa is the first publicly available dataset with its scale and complexity for real-world image composition. Extensive analysis and experiments highlight the value of ORIDa as a resource for advancing further research in object compositing.
CCMNet: Leveraging Calibrated Color Correction Matrices for Cross-Camera Color Constancy
Apr 10, 2025



Computational color constancy, or white balancing, is a key module in a camera's image signal processor (ISP) that corrects color casts from scene lighting. Because this operation occurs in the camera-specific raw color space, white balance algorithms must adapt to different cameras. This paper introduces a learning-based method for cross-camera color constancy that generalizes to new cameras without retraining. Our method leverages pre-calibrated color correction matrices (CCMs) available on ISPs that map the camera's raw color space to a standard space (e.g., CIE XYZ). Our method uses these CCMs to transform predefined illumination colors (i.e., along the Planckian locus) into the test camera's raw space. The mapped illuminants are encoded into a compact camera fingerprint embedding (CFE) that enables the network to adapt to unseen cameras. To prevent overfitting due to limited cameras and CCMs during training, we introduce a data augmentation technique that interpolates between cameras and their CCMs. Experimental results across multiple datasets and backbones show that our method achieves state-of-the-art cross-camera color constancy while remaining lightweight and relying only on data readily available in camera ISPs.