 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Role of Inductive Bias in Time-Series Pretraining: A Case Study in Learning Generalizable Representations for Clinical Time Series
May 27, 2026Clinical time-series learning is routinely constrained by small, heterogeneous cohorts and protocol drift, while its downstream use spans both classification (e.g., pathology diagnosis) and regression (e.g., temporal forecasting). These constraints make foundation-model pretraining appealing, but raises an important question of which inductive biases should the pretraining objective impose so that representations transfer across task types and subjects. We study this question in pathological gait analysis for spinal cord injury (SCI) via PathoFM, an encoder-centric transformer pretrained on multivariate gait windows with three complementary objectives: Local Completion (reconstruct contiguous masked spans to enforce local structure), Temporal Continuity (predict a masked mid-horizon continuation from an observed prefix to enforce smoothness and causal consistency), and Unsupervised In-Context Dynamics (support-query reconstruction conditioned on subject exemplar windows via attention). Empirically comparing objective families (grouping/contrastive, dynamics-based, and generative reconstruction), we find that dynamics-centric mixtures produce the most balanced transfer: grouping objectives favor discriminative margins but can degrade magnitude fidelity needed for continuous targets, whereas reconstruction-only objectives preserve waveform structure but may underperform on classification. Overall, combining local reconstruction with temporal continuity, and adding in-context conditioning when exemplar access is realistic, yields robust subject-generalizing representations.
User Involvement in Robotic Wheelchair Development: A Decade of Limited Progress
Mar 27, 2026Robotic wheelchairs (RWs) offer significant potential to enhance autonomy and participation for people with mobility impairments, yet many systems have failed to achieve sustained real-world adoption. This narrative literature review examined the extent and quality of end-user involvement in RW design, development, and evaluation over the past decade (2015--2025), assessed against core principles shared by major user-involvement approaches (e.g., user-/human-centered design, participatory/co-design, and inclusive design). The findings indicate that user involvement remains limited and is predominantly concentrated in late-stage evaluation rather than in early requirements definition or iterative co-design. Of the 399 records screened, only 23 studies (about 6%) met the inclusion criteria of verifiable end-user involvement, and many relied on small samples, often around ten participants, with limited justification for sample size selection, proxy users, laboratory-based validation, and non-standardized feedback methods. Research teams were largely engineering-dominated (about 89%) and geographically concentrated in high-income countries. Despite strong evidence that sustained user engagement improves usability and adoption in assistive technology, its systematic implementation in RW research remains rare. Advancing the field requires embedding participatory methodologies throughout the design lifecycle and addressing systemic barriers that constrain meaningful user involvement.
KarmaTS: A Universal Simulation Platform for Multivariate Time Series with Functional Causal Dynamics
Nov 14, 2025We introduce KarmaTS, an interactive framework for constructing lag-indexed, executable spatiotemporal causal graphical models for multivariate time series (MTS) simulation. Motivated by the challenge of access-restricted physiological data, KarmaTS generates synthetic MTS with known causal dynamics and augments real-world datasets with expert knowledge. The system constructs a discrete-time structural causal process (DSCP) by combining expert knowledge and algorithmic proposals in a mixed-initiative, human-in-the-loop workflow. The resulting DSCP supports simulation and causal interventions, including those under user-specified distribution shifts. KarmaTS handles mixed variable types, contemporaneous and lagged edges, and modular edge functionals ranging from parameterizable templates to neural network models. Together, these features enable flexible validation and benchmarking of causal discovery algorithms through expert-informed simulation.
Shared Control of Holonomic Wheelchairs through Reinforcement Learning
Jul 22, 2025Smart electric wheelchairs can improve user experience by supporting the driver with shared control. State-of-the-art work showed the potential of shared control in improving safety in navigation for non-holonomic robots. However, for holonomic systems, current approaches often lead to unintuitive behavior for the user and fail to utilize the full potential of omnidirectional driving. Therefore, we propose a reinforcement learning-based method, which takes a 2D user input and outputs a 3D motion while ensuring user comfort and reducing cognitive load on the driver. Our approach is trained in Isaac Gym and tested in simulation in Gazebo. We compare different RL agent architectures and reward functions based on metrics considering cognitive load and user comfort. We show that our method ensures collision-free navigation while smartly orienting the wheelchair and showing better or competitive smoothness compared to a previous non-learning-based method. We further perform a sim-to-real transfer and demonstrate, to the best of our knowledge, the first real-world implementation of RL-based shared control for an omnidirectional mobility platform.
Sim-to-Real Transfer for Mobile Robots with Reinforcement Learning: from NVIDIA Isaac Sim to Gazebo and Real ROS 2 Robots
Jan 06, 2025



Unprecedented agility and dexterous manipulation have been demonstrated with controllers based on deep reinforcement learning (RL), with a significant impact on legged and humanoid robots. Modern tooling and simulation platforms, such as NVIDIA Isaac Sim, have been enabling such advances. This article focuses on demonstrating the applications of Isaac in local planning and obstacle avoidance as one of the most fundamental ways in which a mobile robot interacts with its environments. Although there is extensive research on proprioception-based RL policies, the article highlights less standardized and reproducible approaches to exteroception. At the same time, the article aims to provide a base framework for end-to-end local navigation policies and how a custom robot can be trained in such simulation environment. We benchmark end-to-end policies with the state-of-the-art Nav2, navigation stack in Robot Operating System (ROS). We also cover the sim-to-real transfer process by demonstrating zero-shot transferability of policies trained in the Isaac simulator to real-world robots. This is further evidenced by the tests with different simulated robots, which show the generalization of the learned policy. Finally, the benchmarks demonstrate comparable performance to Nav2, opening the door to quick deployment of state-of-the-art end-to-end local planners for custom robot platforms, but importantly furthering the possibilities by expanding the state and action spaces or task definitions for more complex missions. Overall, with this article we introduce the most important steps, and aspects to consider, in deploying RL policies for local path planning and obstacle avoidance with Isaac Sim training, Gazebo testing, and ROS 2 for real-time inference in real robots. The code is available at https://github.com/sahars93/RL-Navigation.
Torso-Based Control Interface for Standing Mobility-Assistive Devices
Dec 04, 2023



Wheelchairs and mobility devices have transformed our bodies into cybernic systems, extending our well-being by enabling individuals with reduced mobility to regain freedom. Notwithstanding, current interfaces of control require to use the hands, therefore constraining the user from performing functional activities of daily living. In this work, we present a unique design of torso-based control interface with compliant coupling support for standing mobility assistive devices. We take the coupling between the human and robot into consideration in the interface design. The design includes a compliant support mechanism and a mapping between the body movement space and the velocity space. We present experiments including multiple conditions, with a joystick for comparison with the proposed torso control interface. The results of a path-following experiment showed that users were able to control the device naturally using the hands-free interface, and the performance was comparable with the joystick, with 10% more consumed time, an average cross error of 0.116 m and 4.9% less average acceleration. The result of an object-transferring experiment showed the advantage of using the proposed interface in case users needed to manipulate objects while locomotion. The torso control scored 15% less in the System Usability Scale than the joystick in the path following task but 3.3% more in the object transferring task.
Pedestrian-Robot Interactions on Autonomous Crowd Navigation: Reactive Control Methods and Evaluation Metrics
Aug 03, 2022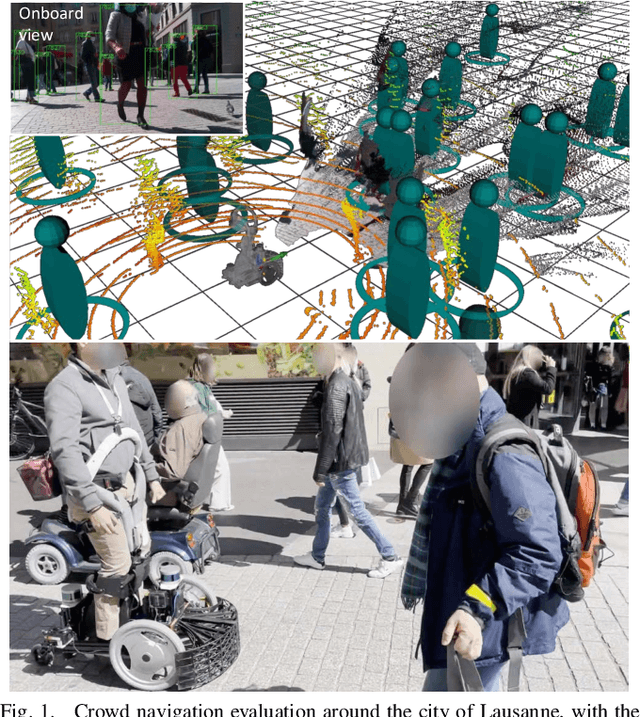
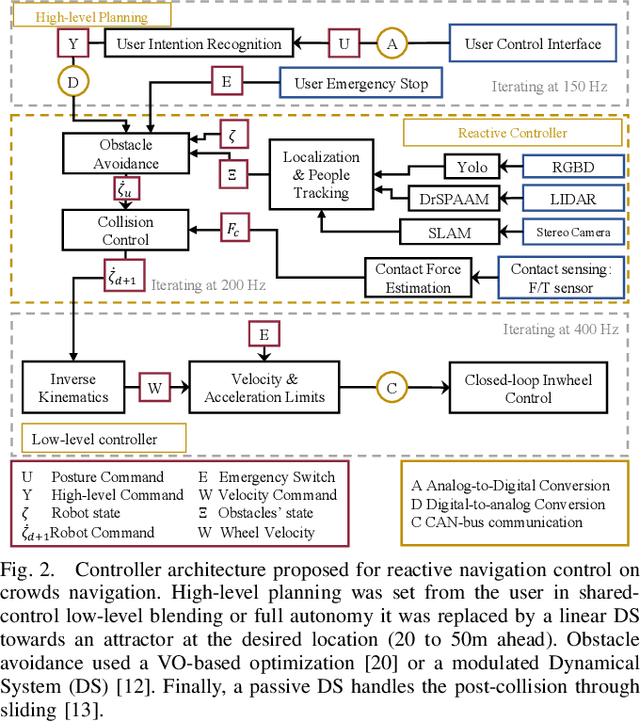
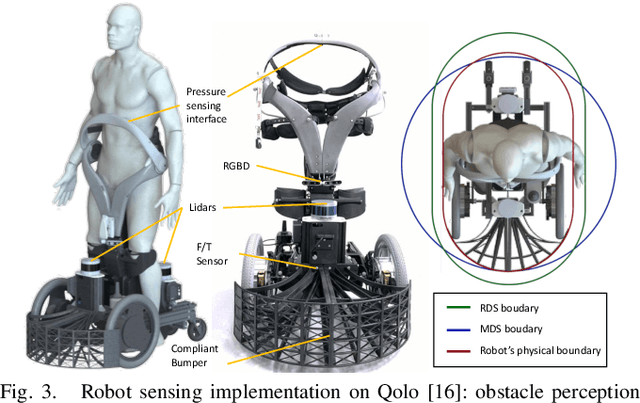
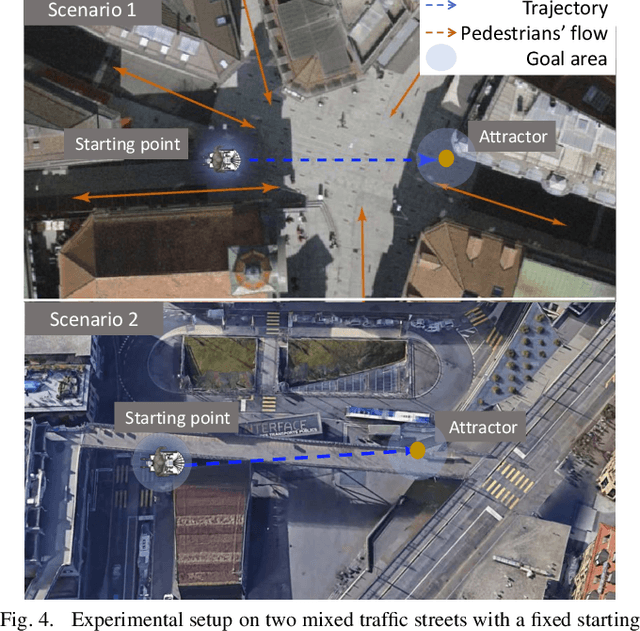
Autonomous navigation in highly populated areas remains a challenging task for robots because of the difficulty in guaranteeing safe interactions with pedestrians in unstructured situations. In this work, we present a crowd navigation control framework that delivers continuous obstacle avoidance and post-contact control evaluated on an autonomous personal mobility vehicle. We propose evaluation metrics for accounting efficiency, controller response and crowd interactions in natural crowds. We report the results of over 110 trials in different crowd types: sparse, flows, and mixed traffic, with low- (< 0.15 ppsm), mid- (< 0.65 ppsm), and high- (< 1 ppsm) pedestrian densities. We present comparative results between two low-level obstacle avoidance methods and a baseline of shared control. Results show a 10% drop in relative time to goal on the highest density tests, and no other efficiency metric decrease. Moreover, autonomous navigation showed to be comparable to shared-control navigation with a lower relative jerk and significantly higher fluency in commands indicating high compatibility with the crowd. We conclude that the reactive controller fulfils a necessary task of fast and continuous adaptation to crowd navigation, and it should be coupled with high-level planners for environmental and situational awareness.
* \c{opyright}IEEE All rights reserved. IEEE-IROS-2022, Oct.23-27. Kyoto, Japan
Unfreezing Social Navigation: Dynamical Systems based Compliance for Contact Control in Robot Navigation
Mar 02, 2022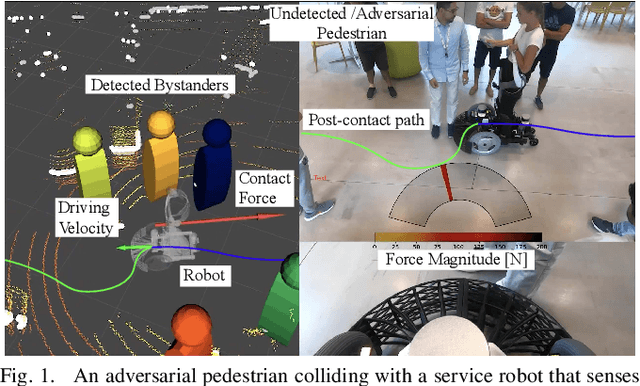
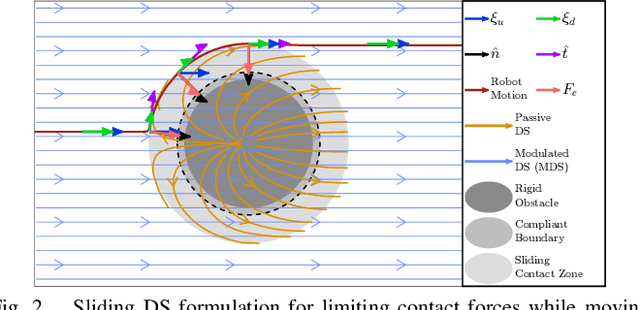
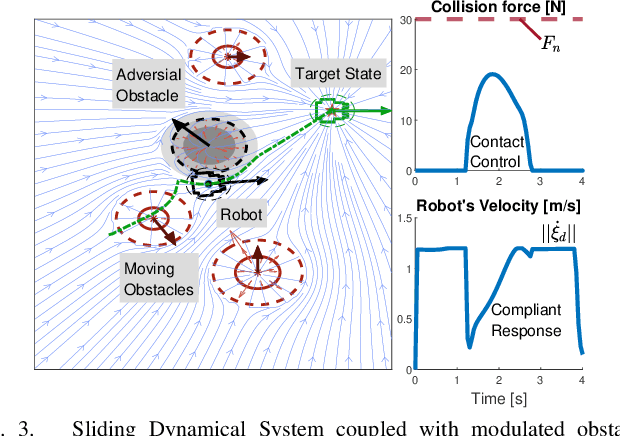
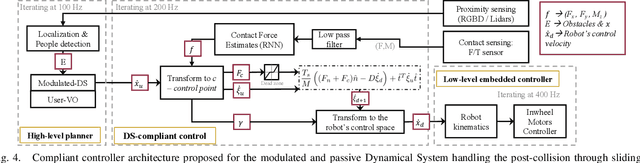
Large efforts have focused on ensuring that the controllers for mobile service robots follow proxemics and other social rules to ensure both safe and socially acceptable distance to pedestrians. Nonetheless, involuntary contact may be unavoidable when the robot travels in crowded areas or when encountering adversarial pedestrians. Freezing the robot in response to contact might be detrimental to bystanders' safety and prevents it from achieving its task. Unavoidable contacts must hence be controlled to ensure the safe and smooth travelling of robots in pedestrian alleys. We present a force-limited and obstacle avoidance controller integrated into a time-invariant dynamical system (DS) in a closed-loop force controller that let the robot react instantaneously to contact or to the sudden appearance of pedestrians. Mitigating the risk of collision is done by modulating the velocity commands upon detecting a contact and by absorbing part of the contact force through active compliant control when the robot bumps inadvertently against a pedestrian. We evaluated our method with a personal mobility robot -- Qolo -- showing contact mitigation with passive and active compliance. We showed the robot able to overcome an adversarial pedestrian within 9 N of the set limit contact force for speeds under 1 m/s. Moreover, we evaluated integrated obstacle avoidance proving the ability to advance without incurring any other collision.
* 7 pages
Personal Mobility With Synchronous Trunk-Knee Passive Exoskeleton: Optimizing Human-Robot Energy Transfer
Jan 10, 2022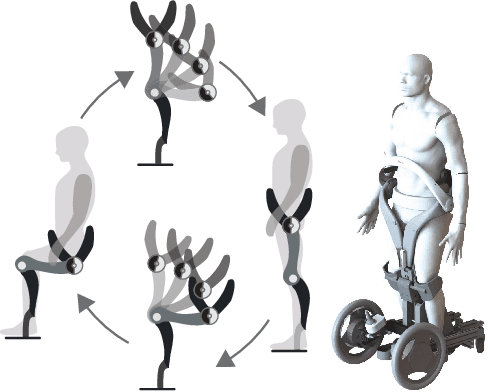
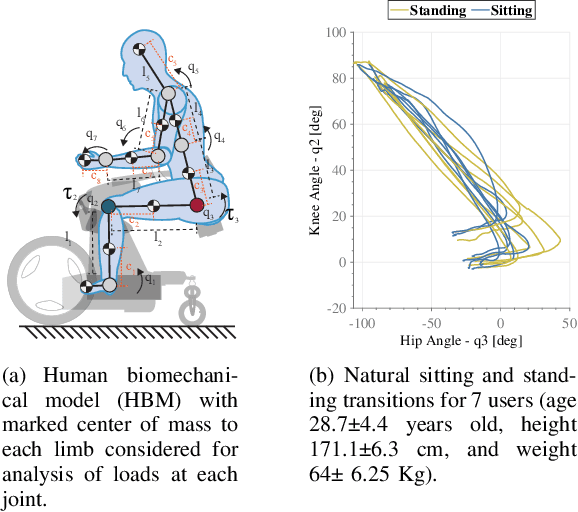
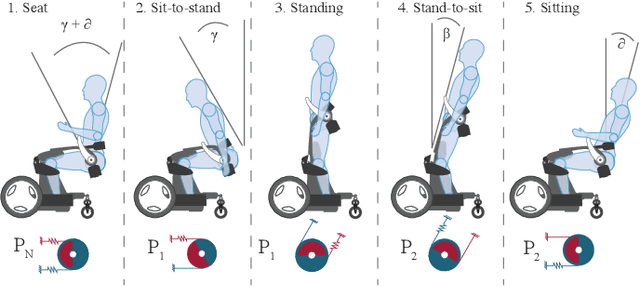
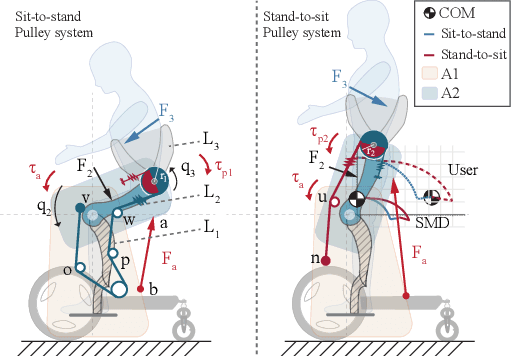
We present a personal mobility device for lower-body impaired users through a light-weighted exoskeleton on wheels. On its core, a novel passive exoskeleton provides postural transition leveraging natural body postures with support to the trunk on sit-to-stand and stand-to-sit (STS) transitions by a single gas spring as an energy storage unit. We propose a direction-dependent coupling of knees and hip joints through a double-pulley wire system, transferring energy from the torso motion towards balancing the moment load at the knee joint actuator. Herewith, the exoskeleton maximizes energy transfer and the naturalness of the user's movement. We introduce an embodied user interface for hands-free navigation through a torso pressure sensing with minimal trunk rotations, resulting on average $19^{\circ} \pm 13^{\circ}$ on six unimpaired users. We evaluated the design for STS assistance on 11 unimpaired users observing motions and muscle activity during the transitions. Results comparing assisted and unassisted STS transitions validated a significant reduction (up to $68\%$ $p<0.01$) at the involved muscle groups. Moreover, we showed it feasible through natural torso leaning movements of $+12^{\circ}\pm 6.5^{\circ}$ and $- 13.7^{\circ} \pm 6.1^{\circ}$ for standing and sitting, respectively. Passive postural transition assistance warrants further work on increasing its applicability and broadening the user population.
Virtual Landmark-Based Control of Docking Support for Assistive Mobility Devices
Jul 28, 2021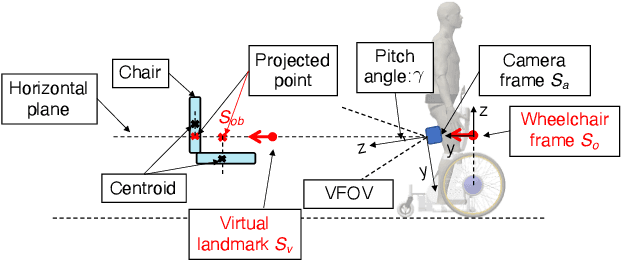
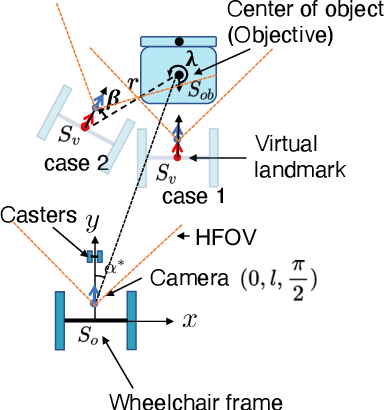
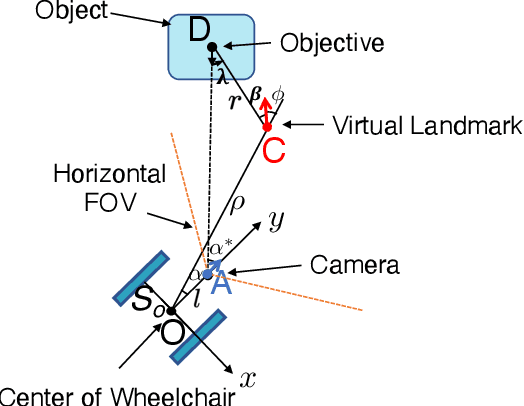
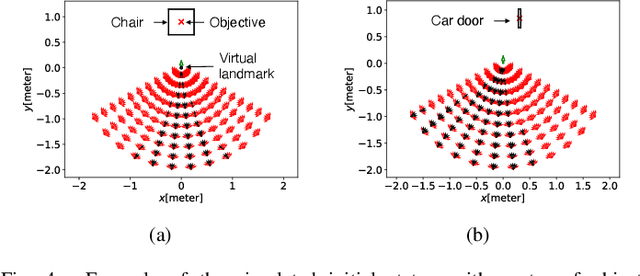
This work proposes an autonomous docking control for nonholonomic constrained mobile robots and applies it to an intelligent mobility device or wheelchair for assisting the user in approaching resting furniture such as a chair or a bed. We defined a virtual landmark inferred from the target docking destination. Then, we solve the problem of keeping the targeted volume inside the field of view (FOV) of a tracking camera and docking to the virtual landmark through a novel definition that enables to control for the desired end-pose. In this article, we proposed a nonlinear feedback controller to perform the docking with the depth camera's FOV as a constraint. Then, a numerical method is proposed to find the feasible space of initial states where convergence could be guaranteed. Finally, the entire system was embedded for real-time operation on a standing wheelchair with the virtual landmark estimation by 3D object tracking with an RGB-D camera and we validated the effectiveness in simulation and experimental evaluations. The results show the guaranteed convergence for the feasible space depending on the virtual landmark location. In the implementation, the robot converges to the virtual landmark while respecting the FOV constraints.
* IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2021), JULY 12-16. Virtual Conference hosted by TU Delft, Delft, The Netherlands. Presentation video: https://www.youtube.com/watch?v=p6DzbjV6w4c