 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeController Design for Structured State-space Models via Contraction Theory
Apr 08, 2026This paper presents an indirect data-driven output feedback controller synthesis for nonlinear systems, leveraging Structured State-space Models (SSMs) as surrogate models. SSMs have emerged as a compelling alternative in modelling time-series data and dynamical systems. They can capture long-term dependencies while maintaining linear computational complexity with respect to the sequence length, in comparison to the quadratic complexity of Transformer-based architectures. The contributions of this work are threefold. We provide the first analysis of controllability and observability of SSMs, which leads to scalable control design via Linear Matrix Inequalities (LMIs) that leverage contraction theory. Moreover, a separation principle for SSMs is established, enabling the independent design of observers and state-feedback controllers while preserving the exponential stability of the closed-loop system. The effectiveness of the proposed framework is demonstrated through a numerical example, showcasing nonlinear system identification and the synthesis of an output feedback controller.
A Proposed Paradigm for Imputing Missing Multi-Sensor Data in the Healthcare Domain
Jan 07, 2026Chronic diseases such as diabetes pose significant management challenges, particularly due to the risk of complications like hypoglycemia, which require timely detection and intervention. Continuous health monitoring through wearable sensors offers a promising solution for early prediction of glycemic events. However, effective use of multisensor data is hindered by issues such as signal noise and frequent missing values. This study examines the limitations of existing datasets and emphasizes the temporal characteristics of key features relevant to hypoglycemia prediction. A comprehensive analysis of imputation techniques is conducted, focusing on those employed in state-of-the-art studies. Furthermore, imputation methods derived from machine learning and deep learning applications in other healthcare contexts are evaluated for their potential to address longer gaps in time-series data. Based on this analysis, a systematic paradigm is proposed, wherein imputation strategies are tailored to the nature of specific features and the duration of missing intervals. The review concludes by emphasizing the importance of investigating the temporal dynamics of individual features and the implementation of multiple, feature-specific imputation techniques to effectively address heterogeneous temporal patterns inherent in the data.
* 21 Pages, 6 Figures, 7 Tables
Laplace-Net: Learning Dynamical Systems with External Forcing
Mar 17, 2025Modelling forced dynamical systems - where an external input drives the system state - is critical across diverse domains such as engineering, finance, and the natural sciences. In this work, we propose Laplace-Net, a decoupled, solver-free neural framework for learning forced and delay-aware systems. It leverages a Laplace transform-based approach to decompose internal dynamics, external inputs, and initial values into established theoretical concepts, enhancing interpretability. Laplace-Net promotes transferability since the system can be rapidly re-trained or fine-tuned for new forcing signals, providing flexibility in applications ranging from controller adaptation to long-horizon forecasting. Experimental results on eight benchmark datasets - including linear, non-linear, and delayed systems - demonstrate the method's improved accuracy and robustness compared to state-of-the-art approaches, particularly in handling complex and previously unseen inputs.
Bioimpedance a Diagnostic Tool for Tobacco Induced Oral Lesions: a Mixed Model cross-sectional study
Aug 21, 2024Introduction: Electrical impedance spectroscopy (EIS) has recently developed as a novel diagnostic device for screening and evaluating cervical dysplasia, prostate cancer, breast cancer and basal cell carcinoma. The current study aimed to validate and evaluate bioimpedance as a diagnostic tool for tobacco-induced oral lesions. Methodology: The study comprised 50 OSCC and OPMD tissue specimens for in-vitro study and 320 subjects for in vivo study. Bioimpedance device prepared and calibrated. EIS measurements were done for the habit and control groups and were compared. Results: The impedance value in the control group was significantly higher compared to the OPMD and OSCC groups. Diagnosis based on BIS measurements has a sensitivity of 95.9% and a specificity of 86.7%. Conclusion: Bioimpedance device can help in decision-making for differentiating OPMD and OSCC cases and their management, especially in primary healthcare settings. Keywords: Impedance, Cancer, Diagnosis, Device, Community
Unfreezing Social Navigation: Dynamical Systems based Compliance for Contact Control in Robot Navigation
Mar 02, 2022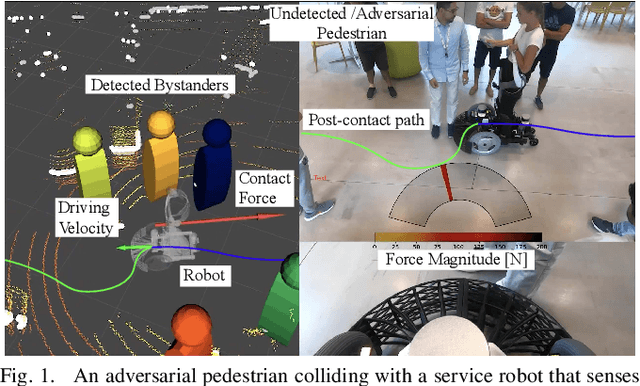
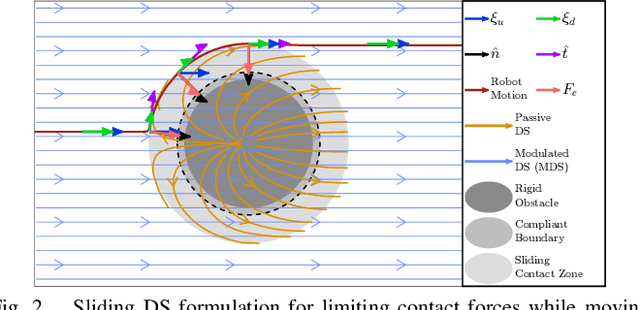
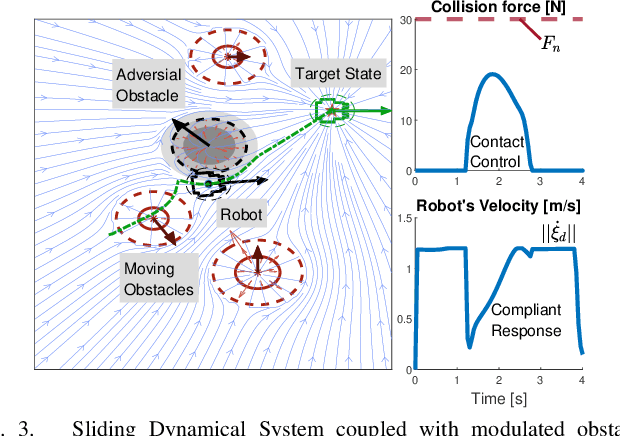
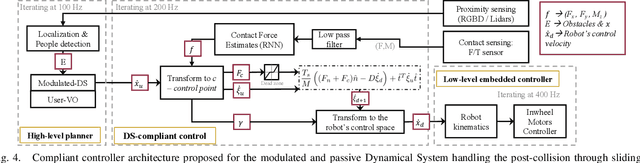
Large efforts have focused on ensuring that the controllers for mobile service robots follow proxemics and other social rules to ensure both safe and socially acceptable distance to pedestrians. Nonetheless, involuntary contact may be unavoidable when the robot travels in crowded areas or when encountering adversarial pedestrians. Freezing the robot in response to contact might be detrimental to bystanders' safety and prevents it from achieving its task. Unavoidable contacts must hence be controlled to ensure the safe and smooth travelling of robots in pedestrian alleys. We present a force-limited and obstacle avoidance controller integrated into a time-invariant dynamical system (DS) in a closed-loop force controller that let the robot react instantaneously to contact or to the sudden appearance of pedestrians. Mitigating the risk of collision is done by modulating the velocity commands upon detecting a contact and by absorbing part of the contact force through active compliant control when the robot bumps inadvertently against a pedestrian. We evaluated our method with a personal mobility robot -- Qolo -- showing contact mitigation with passive and active compliance. We showed the robot able to overcome an adversarial pedestrian within 9 N of the set limit contact force for speeds under 1 m/s. Moreover, we evaluated integrated obstacle avoidance proving the ability to advance without incurring any other collision.
* 7 pages