 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInference-Time Rethinking with Latent Thought Vectors for Math Reasoning
Feb 06, 2026Standard chain-of-thought reasoning generates a solution in a single forward pass, committing irrevocably to each token and lacking a mechanism to recover from early errors. We introduce Inference-Time Rethinking, a generative framework that enables iterative self-correction by decoupling declarative latent thought vectors from procedural generation. We factorize reasoning into a continuous latent thought vector (what to reason about) and a decoder that verbalizes the trace conditioned on this vector (how to reason). Beyond serving as a declarative buffer, latent thought vectors compress the reasoning structure into a continuous representation that abstracts away surface-level token variability, making gradient-based optimization over reasoning strategies well-posed. Our prior model maps unstructured noise to a learned manifold of valid reasoning patterns, and at test time we employ a Gibbs-style procedure that alternates between generating a candidate trace and optimizing the latent vector to better explain that trace, effectively navigating the latent manifold to refine the reasoning strategy. Training a 0.2B-parameter model from scratch on GSM8K, our method with 30 rethinking iterations surpasses baselines with 10 to 15 times more parameters, including a 3B counterpart. This result demonstrates that effective mathematical reasoning can emerge from sophisticated inference-time computation rather than solely from massive parameter counts.
Place Cells as Position Embeddings of Multi-Time Random Walk Transition Kernels for Path Planning
May 20, 2025The hippocampus orchestrates spatial navigation through collective place cell encodings that form cognitive maps. We reconceptualize the population of place cells as position embeddings approximating multi-scale symmetric random walk transition kernels: the inner product $\langle h(x, t), h(y, t) \rangle = q(y|x, t)$ represents normalized transition probabilities, where $h(x, t)$ is the embedding at location $ x $, and $q(y|x, t)$ is the normalized symmetric transition probability over time $t$. The time parameter $\sqrt{t}$ defines a spatial scale hierarchy, mirroring the hippocampal dorsoventral axis. $q(y|x, t)$ defines spatial adjacency between $x$ and $y$ at scale or resolution $\sqrt{t}$, and the pairwise adjacency relationships $(q(y|x, t), \forall x, y)$ are reduced into individual embeddings $(h(x, t), \forall x)$ that collectively form a map of the environment at sale $\sqrt{t}$. Our framework employs gradient ascent on $q(y|x, t) = \langle h(x, t), h(y, t)\rangle$ with adaptive scale selection, choosing the time scale with maximal gradient at each step for trap-free, smooth trajectories. Efficient matrix squaring $P_{2t} = P_t^2$ builds global representations from local transitions $P_1$ without memorizing past trajectories, enabling hippocampal preplay-like path planning. This produces robust navigation through complex environments, aligning with hippocampal navigation. Experimental results show that our model captures place cell properties -- field size distribution, adaptability, and remapping -- while achieving computational efficiency. By modeling collective transition probabilities rather than individual place fields, we offer a biologically plausible, scalable framework for spatial navigation.
Scalable Language Models with Posterior Inference of Latent Thought Vectors
Feb 03, 2025



We propose a novel family of language models, Latent-Thought Language Models (LTMs), which incorporate explicit latent thought vectors that follow an explicit prior model in latent space. These latent thought vectors guide the autoregressive generation of ground tokens through a Transformer decoder. Training employs a dual-rate optimization process within the classical variational Bayes framework: fast learning of local variational parameters for the posterior distribution of latent vectors, and slow learning of global decoder parameters. Empirical studies reveal that LTMs possess additional scaling dimensions beyond traditional LLMs, yielding a structured design space. Higher sample efficiency can be achieved by increasing training compute per token, with further gains possible by trading model size for more inference steps. Designed based on these scaling properties, LTMs demonstrate superior sample and parameter efficiency compared to conventional autoregressive models and discrete diffusion models. They significantly outperform these counterparts in validation perplexity and zero-shot language modeling. Additionally, LTMs exhibit emergent few-shot in-context reasoning capabilities that scale with model and latent size, and achieve competitive performance in conditional and unconditional text generation.
A minimalistic representation model for head direction system
Nov 15, 2024



We present a minimalistic representation model for the head direction (HD) system, aiming to learn a high-dimensional representation of head direction that captures essential properties of HD cells. Our model is a representation of rotation group $U(1)$, and we study both the fully connected version and convolutional version. We demonstrate the emergence of Gaussian-like tuning profiles and a 2D circle geometry in both versions of the model. We also demonstrate that the learned model is capable of accurate path integration.
Aligning Large Language Models via Fine-grained Supervision
Jun 04, 2024



Pre-trained large-scale language models (LLMs) excel at producing coherent articles, yet their outputs may be untruthful, toxic, or fail to align with user expectations. Current approaches focus on using reinforcement learning with human feedback (RLHF) to improve model alignment, which works by transforming coarse human preferences of LLM outputs into a feedback signal that guides the model learning process. However, because this approach operates on sequence-level feedback, it lacks the precision to identify the exact parts of the output affecting user preferences. To address this gap, we propose a method to enhance LLM alignment through fine-grained token-level supervision. Specifically, we ask annotators to minimally edit less preferred responses within the standard reward modeling dataset to make them more favorable, ensuring changes are made only where necessary while retaining most of the original content. The refined dataset is used to train a token-level reward model, which is then used for training our fine-grained Proximal Policy Optimization (PPO) model. Our experiment results demonstrate that this approach can achieve up to an absolute improvement of $5.1\%$ in LLM performance, in terms of win rate against the reference model, compared with the traditional PPO model.
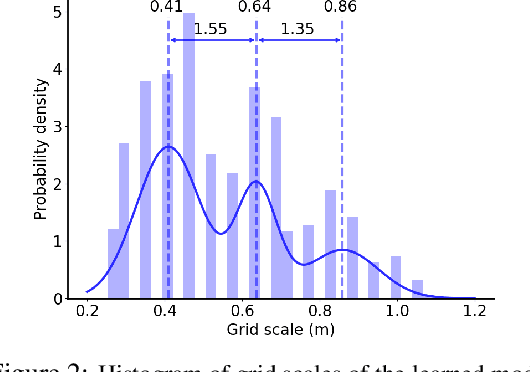
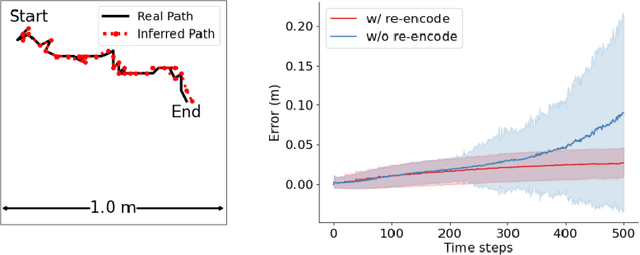
An Investigation of Conformal Isometry Hypothesis for Grid Cells
May 27, 2024This paper investigates the conformal isometry hypothesis as a potential explanation for the emergence of hexagonal periodic patterns in the response maps of grid cells. The hypothesis posits that the activities of the population of grid cells form a high-dimensional vector in the neural space, representing the agent's self-position in 2D physical space. As the agent moves in the 2D physical space, the vector rotates in a 2D manifold in the neural space, driven by a recurrent neural network. The conformal isometry hypothesis proposes that this 2D manifold in the neural space is a conformally isometric embedding of the 2D physical space, in the sense that local displacements of the vector in neural space are proportional to local displacements of the agent in the physical space. Thus the 2D manifold forms an internal map of the 2D physical space, equipped with an internal metric. In this paper, we conduct numerical experiments to show that this hypothesis underlies the hexagon periodic patterns of grid cells. We also conduct theoretical analysis to further support this hypothesis. In addition, we propose a conformal modulation of the input velocity of the agent so that the recurrent neural network of grid cells satisfies the conformal isometry hypothesis automatically. To summarize, our work provides numerical and theoretical evidences for the conformal isometry hypothesis for grid cells and may serve as a foundation for further development of normative models of grid cells and beyond.
Latent Plan Transformer: Planning as Latent Variable Inference
Feb 07, 2024



In tasks aiming for long-term returns, planning becomes necessary. We study generative modeling for planning with datasets repurposed from offline reinforcement learning. Specifically, we identify temporal consistency in the absence of step-wise rewards as one key technical challenge. We introduce the Latent Plan Transformer (LPT), a novel model that leverages a latent space to connect a Transformer-based trajectory generator and the final return. LPT can be learned with maximum likelihood estimation on trajectory-return pairs. In learning, posterior sampling of the latent variable naturally gathers sub-trajectories to form a consistent abstraction despite the finite context. During test time, the latent variable is inferred from an expected return before policy execution, realizing the idea of planning as inference. It then guides the autoregressive policy throughout the episode, functioning as a plan. Our experiments demonstrate that LPT can discover improved decisions from suboptimal trajectories. It achieves competitive performance across several benchmarks, including Gym-Mujoco, Maze2D, and Connect Four, exhibiting capabilities of nuanced credit assignments, trajectory stitching, and adaptation to environmental contingencies. These results validate that latent variable inference can be a strong alternative to step-wise reward prompting.
Conformal Normalization in Recurrent Neural Network of Grid Cells
Oct 29, 2023



Grid cells in the entorhinal cortex of the mammalian brain exhibit striking hexagon firing patterns in their response maps as the animal (e.g., a rat) navigates in a 2D open environment. The responses of the population of grid cells collectively form a vector in a high-dimensional neural activity space, and this vector represents the self-position of the agent in the 2D physical space. As the agent moves, the vector is transformed by a recurrent neural network that takes the velocity of the agent as input. In this paper, we propose a simple and general conformal normalization of the input velocity for the recurrent neural network, so that the local displacement of the position vector in the high-dimensional neural space is proportional to the local displacement of the agent in the 2D physical space, regardless of the direction of the input velocity. Our numerical experiments on the minimally simple linear and non-linear recurrent networks show that conformal normalization leads to the emergence of the hexagon grid patterns. Furthermore, we derive a new theoretical understanding that connects conformal normalization to the emergence of hexagon grid patterns in navigation tasks.
Diverse and Faithful Knowledge-Grounded Dialogue Generation via Sequential Posterior Inference
Jun 01, 2023



The capability to generate responses with diversity and faithfulness using factual knowledge is paramount for creating a human-like, trustworthy dialogue system. Common strategies either adopt a two-step paradigm, which optimizes knowledge selection and response generation separately, and may overlook the inherent correlation between these two tasks, or leverage conditional variational method to jointly optimize knowledge selection and response generation by employing an inference network. In this paper, we present an end-to-end learning framework, termed Sequential Posterior Inference (SPI), capable of selecting knowledge and generating dialogues by approximately sampling from the posterior distribution. Unlike other methods, SPI does not require the inference network or assume a simple geometry of the posterior distribution. This straightforward and intuitive inference procedure of SPI directly queries the response generation model, allowing for accurate knowledge selection and generation of faithful responses. In addition to modeling contributions, our experimental results on two common dialogue datasets (Wizard of Wikipedia and Holl-E) demonstrate that SPI outperforms previous strong baselines according to both automatic and human evaluation metrics.
Conformal Isometry of Lie Group Representation in Recurrent Network of Grid Cells
Oct 06, 2022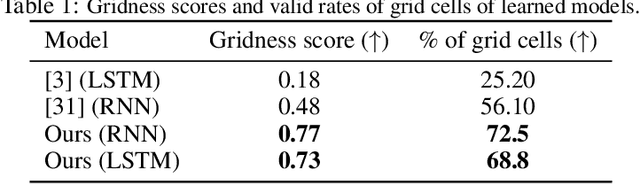

The activity of the grid cell population in the medial entorhinal cortex (MEC) of the brain forms a vector representation of the self-position of the animal. Recurrent neural networks have been developed to explain the properties of the grid cells by transforming the vector based on the input velocity, so that the grid cells can perform path integration. In this paper, we investigate the algebraic, geometric, and topological properties of grid cells using recurrent network models. Algebraically, we study the Lie group and Lie algebra of the recurrent transformation as a representation of self-motion. Geometrically, we study the conformal isometry of the Lie group representation of the recurrent network where the local displacement of the vector in the neural space is proportional to the local displacement of the agent in the 2D physical space. We then focus on a simple non-linear recurrent model that underlies the continuous attractor neural networks of grid cells. Our numerical experiments show that conformal isometry leads to hexagon periodic patterns of the response maps of grid cells and our model is capable of accurate path integration.