 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuesli: Combining Improvements in Policy Optimization
Apr 13, 2021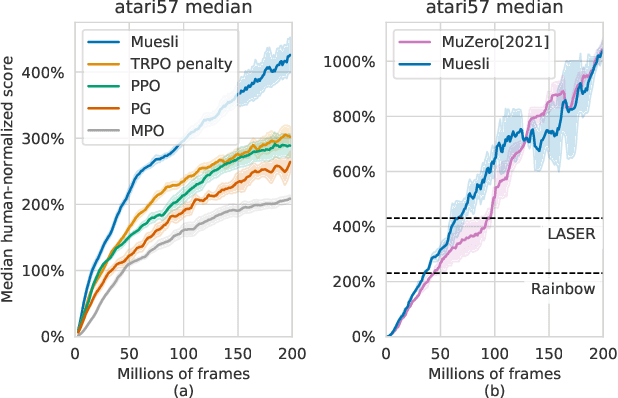
We propose a novel policy update that combines regularized policy optimization with model learning as an auxiliary loss. The update (henceforth Muesli) matches MuZero's state-of-the-art performance on Atari. Notably, Muesli does so without using deep search: it acts directly with a policy network and has computation speed comparable to model-free baselines. The Atari results are complemented by extensive ablations, and by additional results on continuous control and 9x9 Go.
Discovery of Options via Meta-Learned Subgoals
Feb 12, 2021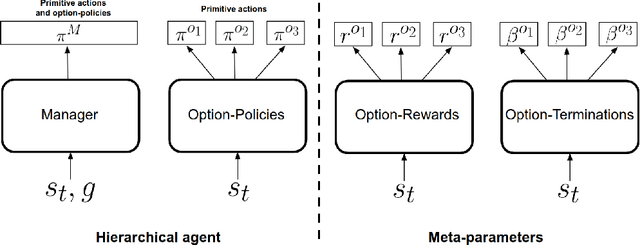
Temporal abstractions in the form of options have been shown to help reinforcement learning (RL) agents learn faster. However, despite prior work on this topic, the problem of discovering options through interaction with an environment remains a challenge. In this paper, we introduce a novel meta-gradient approach for discovering useful options in multi-task RL environments. Our approach is based on a manager-worker decomposition of the RL agent, in which a manager maximises rewards from the environment by learning a task-dependent policy over both a set of task-independent discovered-options and primitive actions. The option-reward and termination functions that define a subgoal for each option are parameterised as neural networks and trained via meta-gradients to maximise their usefulness. Empirical analysis on gridworld and DeepMind Lab tasks show that: (1) our approach can discover meaningful and diverse temporally-extended options in multi-task RL domains, (2) the discovered options are frequently used by the agent while learning to solve the training tasks, and (3) that the discovered options help a randomly initialised manager learn faster in completely new tasks.
The Value Equivalence Principle for Model-Based Reinforcement Learning
Nov 06, 2020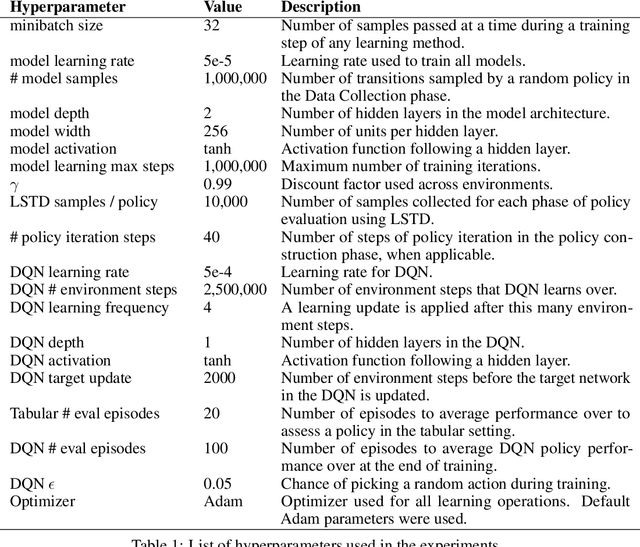

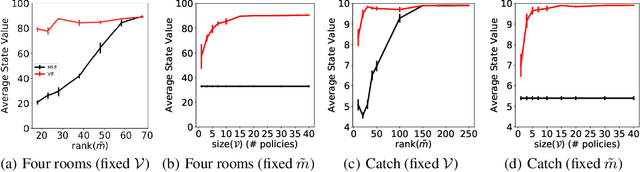
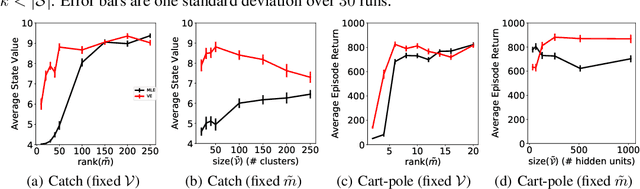
Learning models of the environment from data is often viewed as an essential component to building intelligent reinforcement learning (RL) agents. The common practice is to separate the learning of the model from its use, by constructing a model of the environment's dynamics that correctly predicts the observed state transitions. In this paper we argue that the limited representational resources of model-based RL agents are better used to build models that are directly useful for value-based planning. As our main contribution, we introduce the principle of value equivalence: two models are value equivalent with respect to a set of functions and policies if they yield the same Bellman updates. We propose a formulation of the model learning problem based on the value equivalence principle and analyze how the set of feasible solutions is impacted by the choice of policies and functions. Specifically, we show that, as we augment the set of policies and functions considered, the class of value equivalent models shrinks, until eventually collapsing to a single point corresponding to a model that perfectly describes the environment. In many problems, directly modelling state-to-state transitions may be both difficult and unnecessary. By leveraging the value-equivalence principle one may find simpler models without compromising performance, saving computation and memory. We illustrate the benefits of value-equivalent model learning with experiments comparing it against more traditional counterparts like maximum likelihood estimation. More generally, we argue that the principle of value equivalence underlies a number of recent empirical successes in RL, such as Value Iteration Networks, the Predictron, Value Prediction Networks, TreeQN, and MuZero, and provides a first theoretical underpinning of those results.
Discovering Reinforcement Learning Algorithms
Jul 17, 2020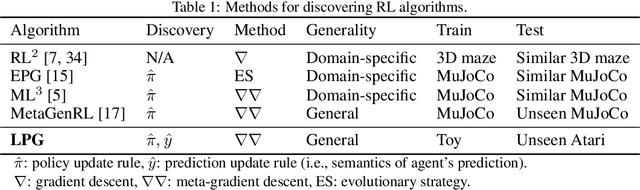
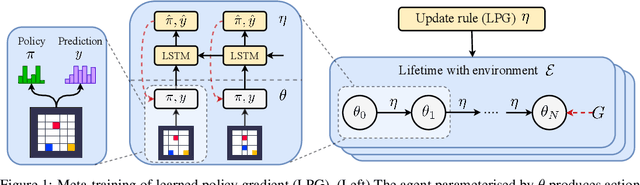
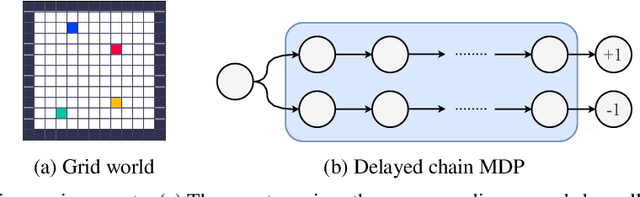
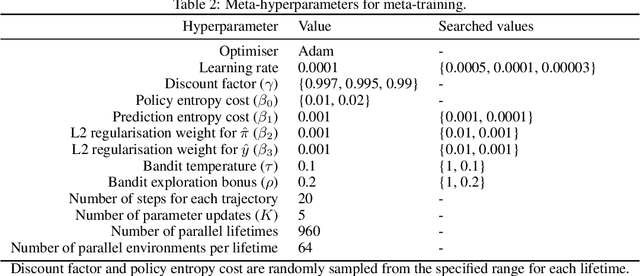
Reinforcement learning (RL) algorithms update an agent's parameters according to one of several possible rules, discovered manually through years of research. Automating the discovery of update rules from data could lead to more efficient algorithms, or algorithms that are better adapted to specific environments. Although there have been prior attempts at addressing this significant scientific challenge, it remains an open question whether it is feasible to discover alternatives to fundamental concepts of RL such as value functions and temporal-difference learning. This paper introduces a new meta-learning approach that discovers an entire update rule which includes both 'what to predict' (e.g. value functions) and 'how to learn from it' (e.g. bootstrapping) by interacting with a set of environments. The output of this method is an RL algorithm that we call Learned Policy Gradient (LPG). Empirical results show that our method discovers its own alternative to the concept of value functions. Furthermore it discovers a bootstrapping mechanism to maintain and use its predictions. Surprisingly, when trained solely on toy environments, LPG generalises effectively to complex Atari games and achieves non-trivial performance. This shows the potential to discover general RL algorithms from data.
Meta-Gradient Reinforcement Learning with an Objective Discovered Online
Jul 16, 2020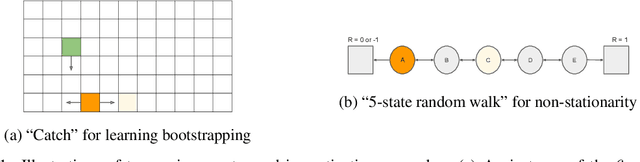
Deep reinforcement learning includes a broad family of algorithms that parameterise an internal representation, such as a value function or policy, by a deep neural network. Each algorithm optimises its parameters with respect to an objective, such as Q-learning or policy gradient, that defines its semantics. In this work, we propose an algorithm based on meta-gradient descent that discovers its own objective, flexibly parameterised by a deep neural network, solely from interactive experience with its environment. Over time, this allows the agent to learn how to learn increasingly effectively. Furthermore, because the objective is discovered online, it can adapt to changes over time. We demonstrate that the algorithm discovers how to address several important issues in RL, such as bootstrapping, non-stationarity, and off-policy learning. On the Atari Learning Environment, the meta-gradient algorithm adapts over time to learn with greater efficiency, eventually outperforming the median score of a strong actor-critic baseline.
Expected Eligibility Traces
Jul 03, 2020
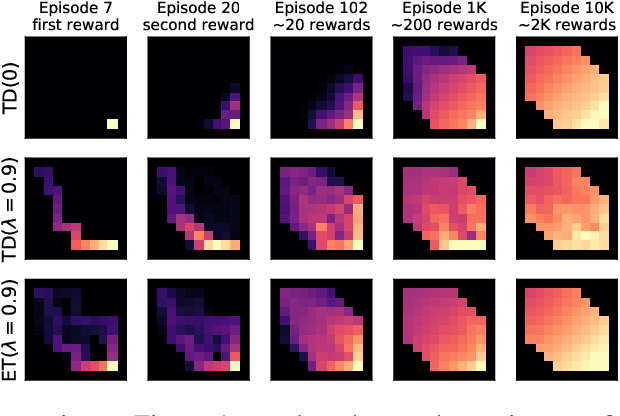
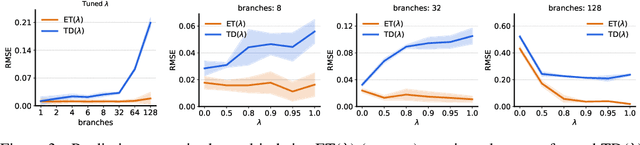
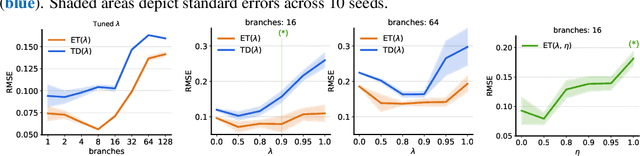
The question of how to determine which states and actions are responsible for a certain outcome is known as the credit assignment problem and remains a central research question in reinforcement learning and artificial intelligence. Eligibility traces enable efficient credit assignment to the recent sequence of states and actions experienced by the agent, but not to counterfactual sequences that could also have led to the current state. In this work, we introduce expected eligibility traces. Expected traces allow, with a single update, to update states and actions that could have preceded the current state, even if they did not do so on this occasion. We discuss when expected traces provide benefits over classic (instantaneous) traces in temporal-difference learning, and show that sometimes substantial improvements can be attained. We provide a way to smoothly interpolate between instantaneous and expected traces by a mechanism similar to bootstrapping, which ensures that the resulting algorithm is a strict generalisation of TD($\lambda$). Finally, we discuss possible extensions and connections to related ideas, such as successor features.
The Value-Improvement Path: Towards Better Representations for Reinforcement Learning
Jun 03, 2020

In value-based reinforcement learning (RL), unlike in supervised learning, the agent faces not a single, stationary, approximation problem, but a sequence of value prediction problems. Each time the policy improves, the nature of the problem changes, shifting both the distribution of states and their values. In this paper we take a novel perspective, arguing that the value prediction problems faced by an RL agent should not be addressed in isolation, but rather as a single, holistic, prediction problem. An RL algorithm generates a sequence of policies that, at least approximately, improve towards the optimal policy. We explicitly characterize the associated sequence of value functions and call it the value-improvement path. Our main idea is to approximate the value-improvement path holistically, rather than to solely track the value function of the current policy. Specifically, we discuss the impact that this holistic view of RL has on representation learning. We demonstrate that a representation that spans the past value-improvement path will also provide an accurate value approximation for future policy improvements. We use this insight to better understand existing approaches to auxiliary tasks and to propose new ones. To test our hypothesis empirically, we augmented a standard deep RL agent with an auxiliary task of learning the value-improvement path. In a study of Atari 2600 games, the augmented agent achieved approximately double the mean and median performance of the baseline agent.
Self-Tuning Deep Reinforcement Learning
Mar 02, 2020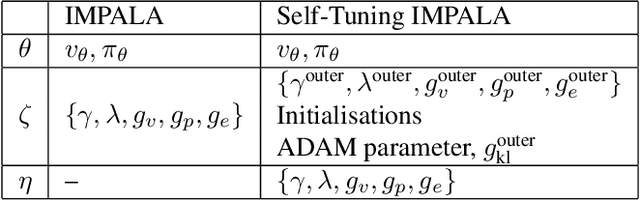
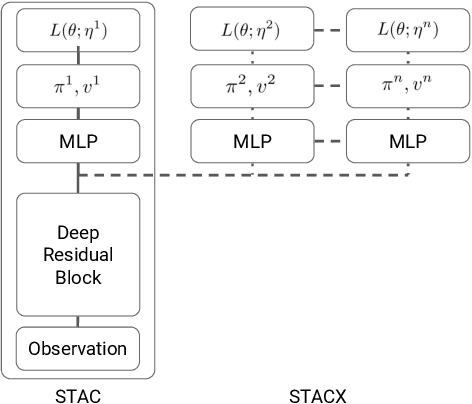
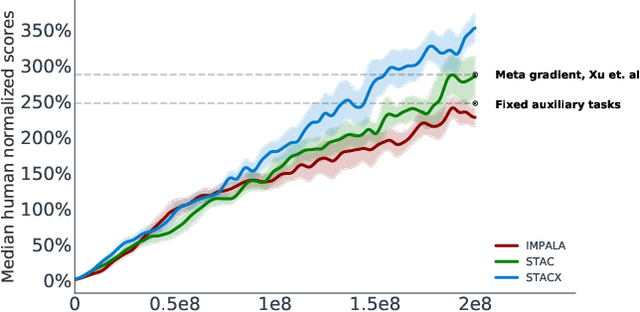
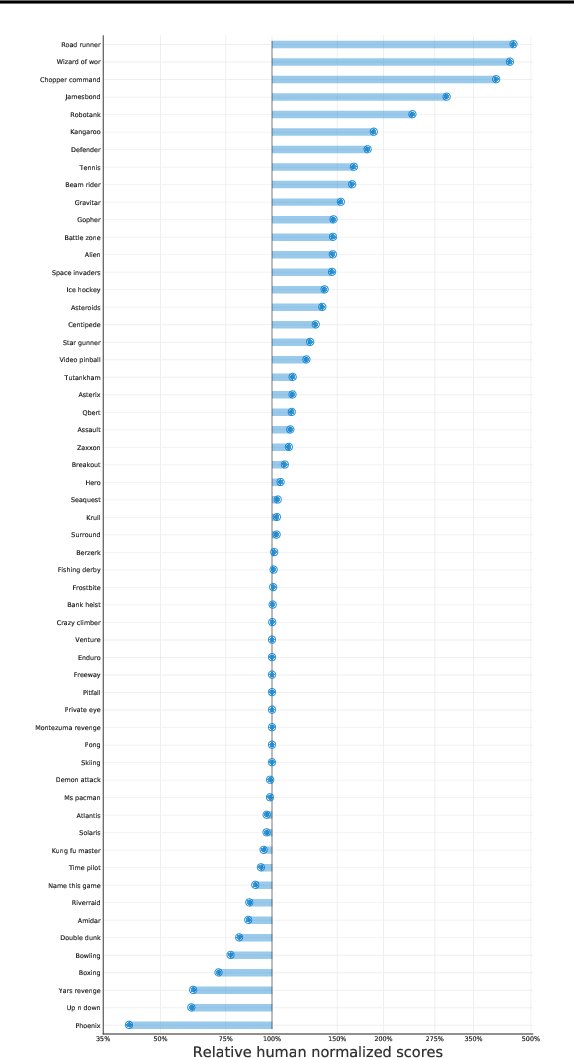
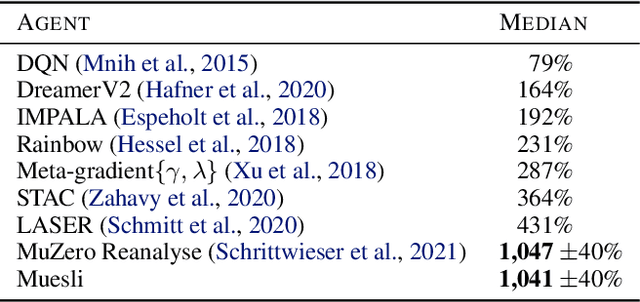
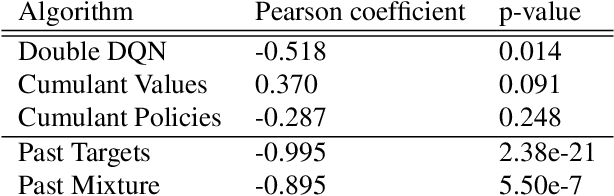
Reinforcement learning (RL) algorithms often require expensive manual or automated hyperparameter searches in order to perform well on a new domain. This need is particularly acute in modern deep RL architectures which often incorporate many modules and multiple loss functions. In this paper, we take a step towards addressing this issue by using metagradients (Xu et al., 2018) to tune these hyperparameters via differentiable cross validation, whilst the agent interacts with and learns from the environment. We present the Self-Tuning Actor Critic (STAC) which uses this process to tune the hyperparameters of the usual loss function of the IMPALA actor critic agent(Espeholt et. al., 2018), to learn the hyperparameters that define auxiliary loss functions, and to balance trade offs in off policy learning by introducing and adapting the hyperparameters of a novel leaky V-trace operator. The method is simple to use, sample efficient and does not require significant increase in compute. Ablative studies show that the overall performance of STAC improves as we adapt more hyperparameters. When applied to 57 games on the Atari 2600 environment over 200 million frames our algorithm improves the median human normalized score of the baseline from 243% to 364%.
Value-driven Hindsight Modelling
Feb 19, 2020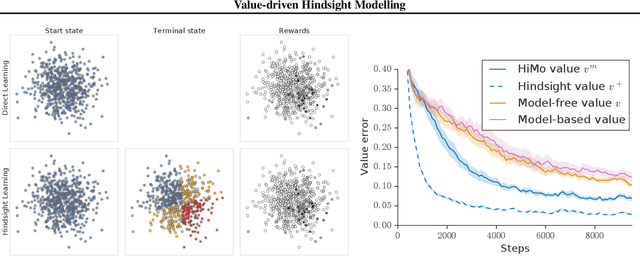
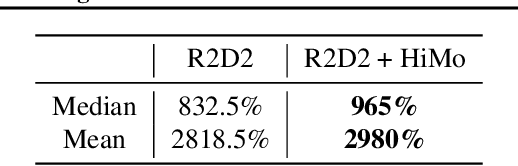
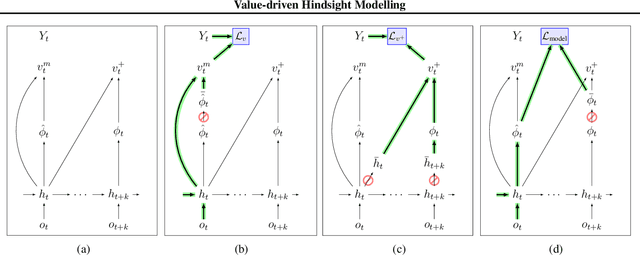
Value estimation is a critical component of the reinforcement learning (RL) paradigm. The question of how to effectively learn predictors for value from data is one of the major problems studied by the RL community, and different approaches exploit structure in the problem domain in different ways. Model learning can make use of the rich transition structure present in sequences of observations, but this approach is usually not sensitive to the reward function. In contrast, model-free methods directly leverage the quantity of interest from the future but have to compose with a potentially weak scalar signal (an estimate of the return). In this paper we develop an approach for representation learning in RL that sits in between these two extremes: we propose to learn what to model in a way that can directly help value prediction. To this end we determine which features of the future trajectory provide useful information to predict the associated return. This provides us with tractable prediction targets that are directly relevant for a task, and can thus accelerate learning of the value function. The idea can be understood as reasoning, in hindsight, about which aspects of the future observations could help past value prediction. We show how this can help dramatically even in simple policy evaluation settings. We then test our approach at scale in challenging domains, including on 57 Atari 2600 games.
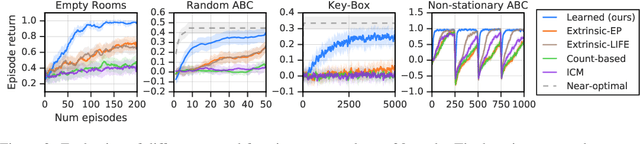
What Can Learned Intrinsic Rewards Capture?
Dec 11, 2019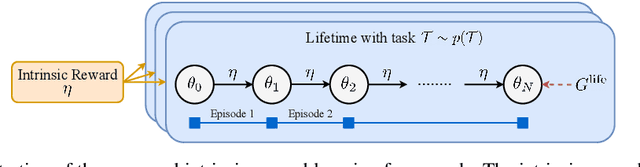

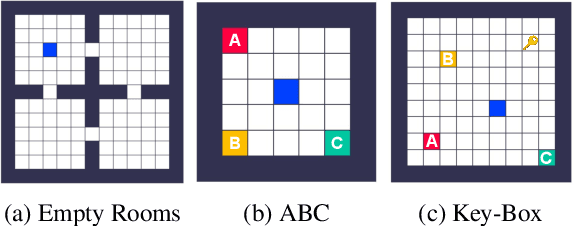
Reinforcement learning agents can include different components, such as policies, value functions, state representations, and environment models. Any or all of these can be the loci of knowledge, i.e., structures where knowledge, whether given or learned, can be deposited and reused. The objective of an agent is to behave so as to maximise the sum of a suitable scalar function of state: the reward. As far as the learning algorithm is concerned, these rewards are typically given and immutable. In this paper we instead consider the proposition that the reward function itself may be a good locus of knowledge. This is consistent with a common use, in the literature, of hand-designed intrinsic rewards to improve the learning dynamics of an agent. We adopt the multi-lifetime setting of the Optimal Rewards Framework, and propose to meta-learn an intrinsic reward function from experience that allows agents to maximise their extrinsic rewards accumulated until the end of their lifetimes. Rewards as a locus of knowledge provide guidance on "what" the agent should strive to do rather than "how" the agent should behave; the latter is more directly captured in policies or value functions for example. Thus, our focus here is on demonstrating the following: (1) that it is feasible to meta-learn good reward functions, (2) that the learned reward functions can capture interesting kinds of "what" knowledge, and (3) that because of the indirectness of this form of knowledge the learned reward functions can generalise to other kinds of agents and to changes in the dynamics of the environment.