 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Manipulation of Compliant Objects with Multi-Objective Optimizer and Adversarial Network for Occlusion Compensation
May 20, 2022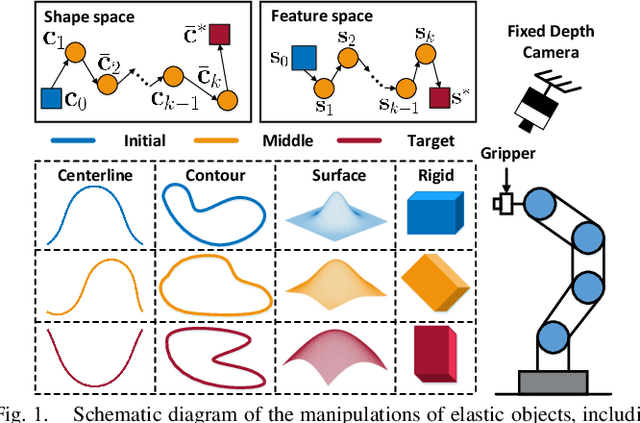
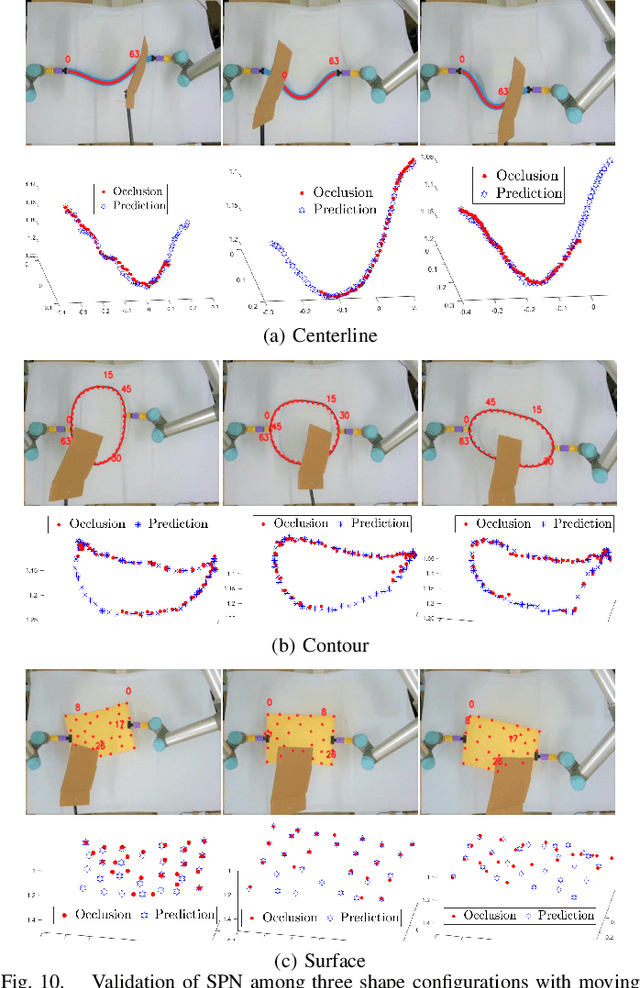
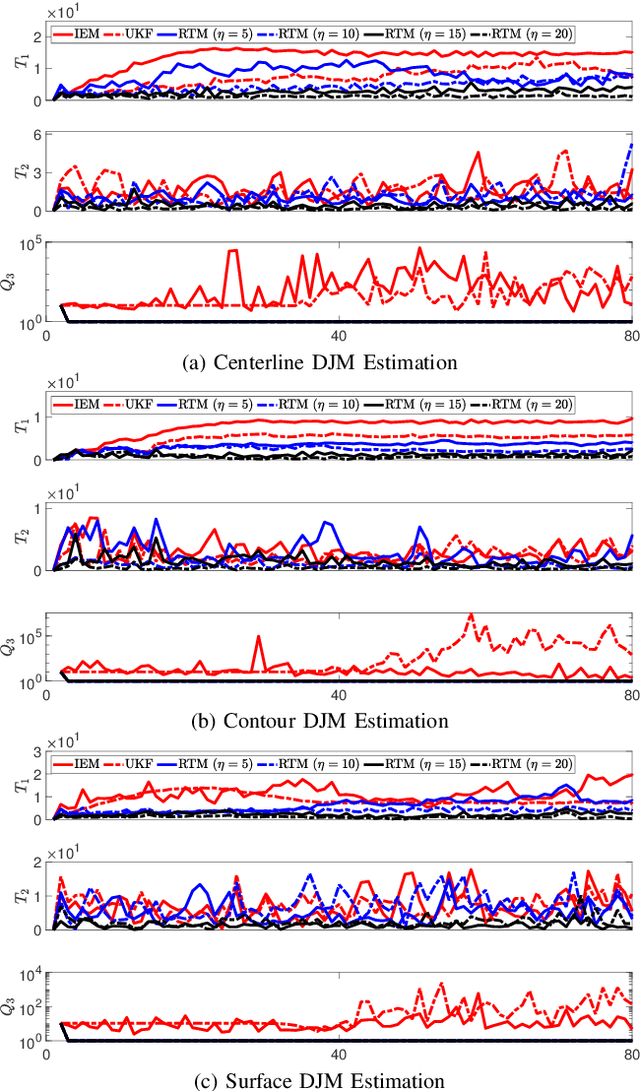
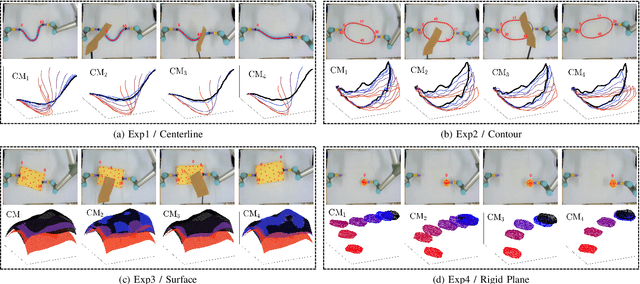
The robotic manipulation of compliant objects is currently one of the most active problems in robotics due to its potential to automate many important applications. Despite the progress achieved by the robotics community in recent years, the 3D shaping of these types of materials remains an open research problem. In this paper, we propose a new vision-based controller to automatically regulate the shape of compliant objects with robotic arms. Our method uses an efficient online surface/curve fitting algorithm that quantifies the object's geometry with a compact vector of features; This feedback-like vector enables to establish an explicit shape servo-loop. To coordinate the motion of the robot with the computed shape features, we propose a receding-time estimator that approximates the system's sensorimotor model while satisfying various performance criteria. A deep adversarial network is developed to robustly compensate for visual occlusions in the camera's field of view, which enables to guide the shaping task even with partial observations of the object. Model predictive control is utilized to compute the robot's shaping motions subject to workspace and saturation constraints. A detailed experimental study is presented to validate the effectiveness of the proposed control framework.
Reliability of Robotic Ultrasound Scanning for Scoliosis Assessment in Comparison with Manual Scanning
May 07, 2022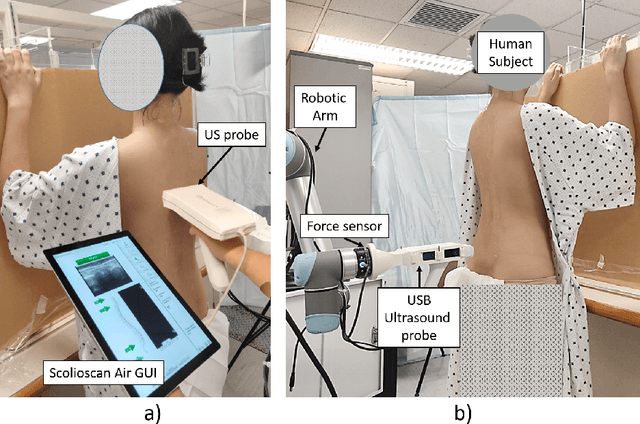

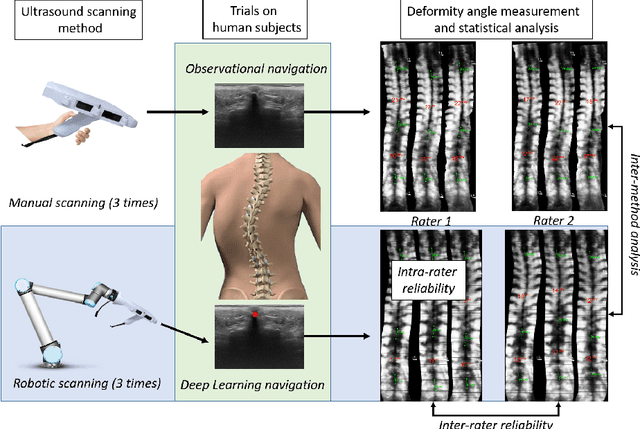

Background: Ultrasound (US) imaging for scoliosis assessment is challenging for a non-experienced operator. The robotic scanning was developed to follow a spinal curvature with deep learning and apply consistent forces to the patient' back. Methods: 23 scoliosis patients were scanned with US devices both, robotically and manually. Two human raters measured each subject's spinous process angles (SPA) on robotic and manual coronal images. Results: The robotic method showed high intra- (ICC > 0.85) and inter-rater (ICC > 0.77) reliabilities. Compared with the manual method, the robotic approach showed no significant difference (p < 0.05) when measuring coronal deformity angles. The MAD for intra-rater analysis lies within an acceptable range from 0 deg to 5 deg for a minimum of 86% and a maximum 97% of a total number of the measured angles. Conclusions: This study demonstrated that scoliosis deformity angles measured on ultrasound images obtained with robotic scanning are comparable to those obtained by manual scanning.
Ultrasound-Guided Assistive Robots for Scoliosis Assessment with Optimization-based Control and Variable Impedance
Mar 04, 2022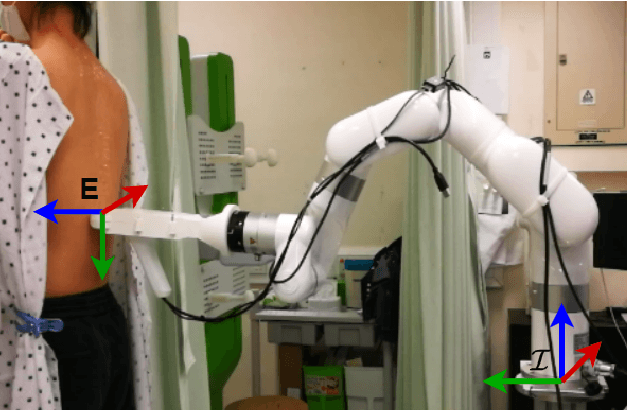

Assistive robots for healthcare have seen a growing demand due to the great potential of relieving medical practitioners from routine jobs. In this paper, we investigate the development of an optimization-based control framework for an ultrasound-guided assistive robot to perform scoliosis assessment. A conventional procedure for scoliosis assessment with ultrasound imaging typically requires a medical practitioner to slide an ultrasound probe along a patient's back. To automate this type of procedure, we need to consider multiple objectives, such as contact force, position, orientation, energy, posture, etc. To address the aforementioned components, we propose to formulate the control framework design as a quadratic programming problem with each objective weighed by its task priority subject to a set of equality and inequality constraints. In addition, as the robot needs to establish constant contact with the patient during spine scanning, we incorporate variable impedance regulation of the end-effector position and orientation in the control architecture to enhance safety and stability during the physical human-robot interaction. Wherein, the variable impedance gains are retrieved by learning from the medical expert's demonstrations. The proposed methodology is evaluated by conducting real-world experiments of autonomous scoliosis assessment with a robot manipulator xArm. The effectiveness is verified by the obtained coronal spinal images of both a phantom and a human subject.
Action Planning for Packing Long Linear Elastic Objects into Compact Boxes with Bimanual Robotic Manipulation
Oct 22, 2021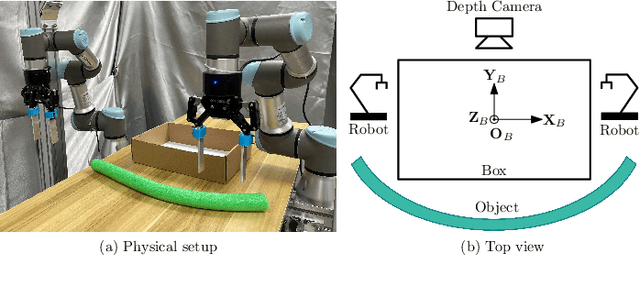
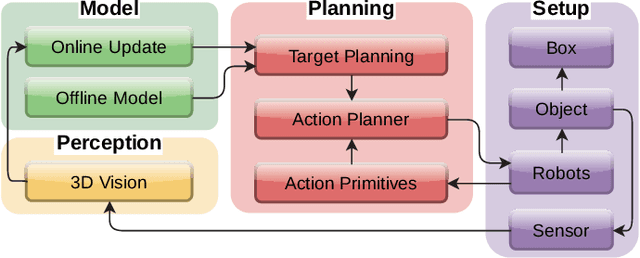
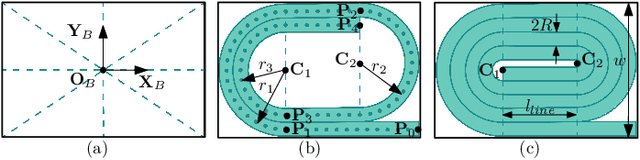

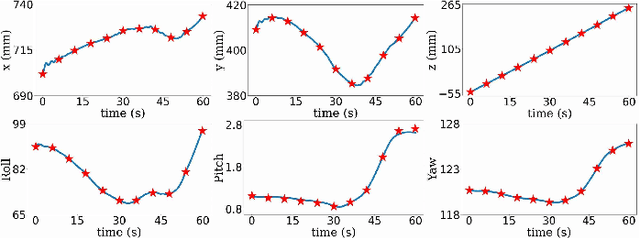
Automatic packing of objects is a critical component for efficient shipping in the Industry 4.0 era. Although robots have shown great success in pick-and-place operations with rigid products, the autonomous shaping and packing of elastic materials into compact boxes remains one of the most challenging problems in robotics; The automation of packing tasks is crucial at this moment given the accelerating shift towards e-commerce (which requires to manipulate multiple types of materials). In this paper, we propose a new action planning approach to automatically pack long linear elastic objects into common-size boxes with a bimanual robotic system. For that, we developed an efficient vision-based method to compute the objects' geometry and track its deformation in real-time and without special markers; The algorithm filters and orders the feedback point cloud that is captured by a depth sensor. A reference object model is introduced to plan the manipulation targets and to complete occluded parts of the object. Action primitives are used to construct high-level behaviors, which enable the execution of all packing steps. To validate the proposed theory, we conduct a detailed experimental study with multiple types and lengths of objects and packing boxes. The proposed methodology is original and its demonstrated manipulation capabilities have not (to the best of the authors knowledge) been previously reported in the literature.
Keypoint-Based Bimanual Shaping of Deformable Linear Objects under Environmental Constraints using Hierarchical Action Planning
Oct 18, 2021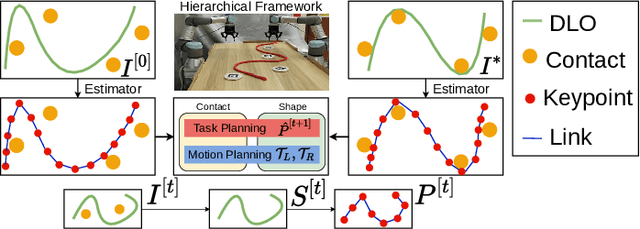
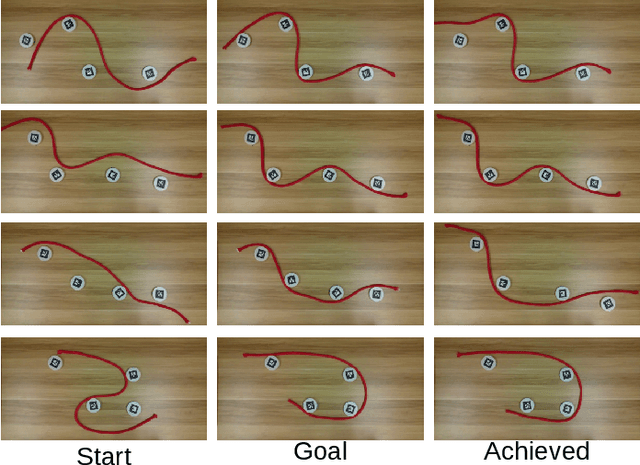
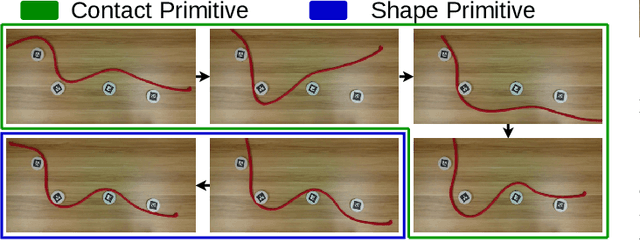
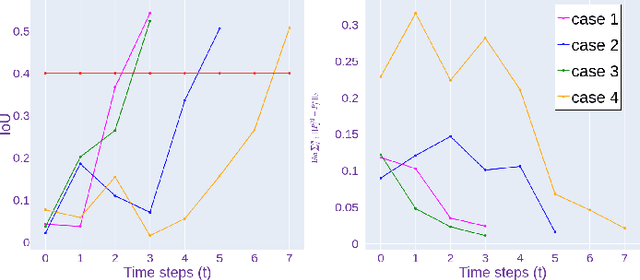
This paper addresses the problem of contact-based manipulation of deformable linear objects (DLOs) towards desired shapes with a dual-arm robotic system. To alleviate the burden of high-dimensional continuous state-action spaces, we model the DLO as a kinematic multibody system via our proposed keypoint detection network. This new perception network is trained on a synthetic labeled image dataset and transferred to real manipulation scenarios without conducting any manual annotations. Our goal-conditioned policy can efficiently learn to rearrange the configuration of the DLO based on the detected keypoints. The proposed hierarchical action framework tackles the manipulation problem in a coarse-to-fine manner (with high-level task planning and low-level motion control) by leveraging on two action primitives. The identification of deformation properties is avoided since the algorithm replans its motion after each bimanual execution. The conducted experimental results reveal that our method achieves high performance in state representation of the DLO, and is robust to uncertain environmental constraints.
Learning Cloth Folding Tasks with Refined Flow Based Spatio-Temporal Graphs
Oct 16, 2021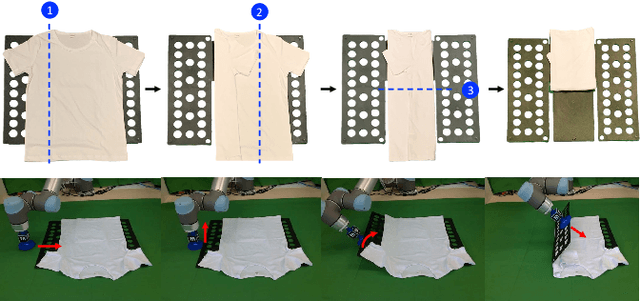
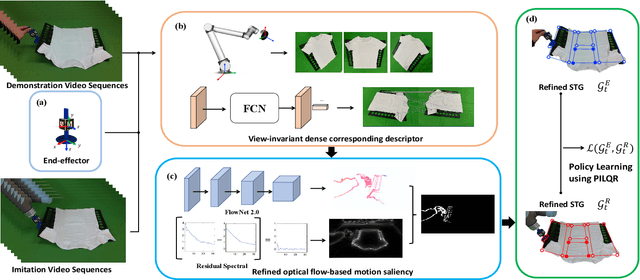
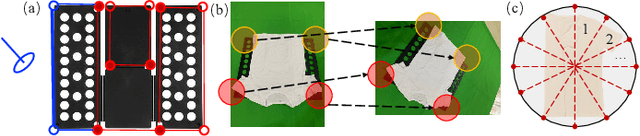
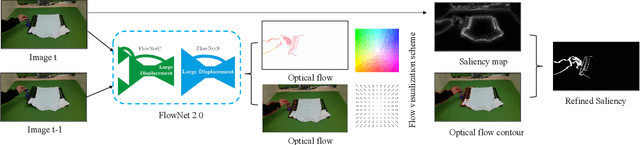
Cloth folding is a widespread domestic task that is seemingly performed by humans but which is highly challenging for autonomous robots to execute due to the highly deformable nature of textiles; It is hard to engineer and learn manipulation pipelines to efficiently execute it. In this paper, we propose a new solution for robotic cloth folding (using a standard folding board) via learning from demonstrations. Our demonstration video encoding is based on a high-level abstraction, namely, a refined optical flow-based spatiotemporal graph, as opposed to a low-level encoding such as image pixels. By constructing a new spatiotemporal graph with an advanced visual corresponding descriptor, the policy learning can focus on key points and relations with a 3D spatial configuration, which allows to quickly generalize across different environments. To further boost the policy searching, we combine optical flow and static motion saliency maps to discriminate the dominant motions for better handling the system dynamics in real-time, which aligns with the attentional motion mechanism that dominates the human imitation process. To validate the proposed approach, we analyze the manual folding procedure and developed a custom-made end-effector to efficiently interact with the folding board. Multiple experiments on a real robotic platform were conducted to validate the effectiveness and robustness of the proposed method.
Follow the Curve: Robotic-Ultrasound Navigation with Learning Based Localization of Spinous Processes for Scoliosis Assessment
Sep 11, 2021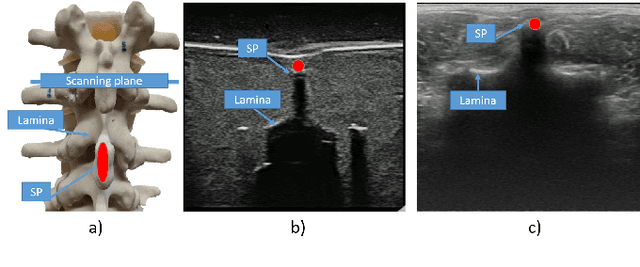
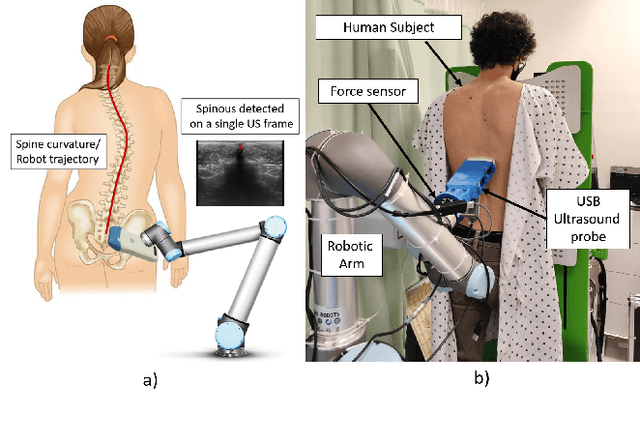
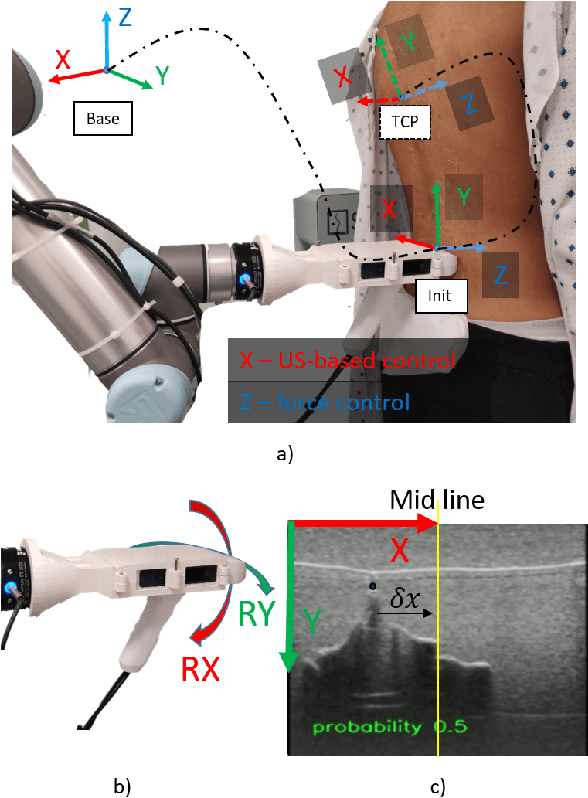
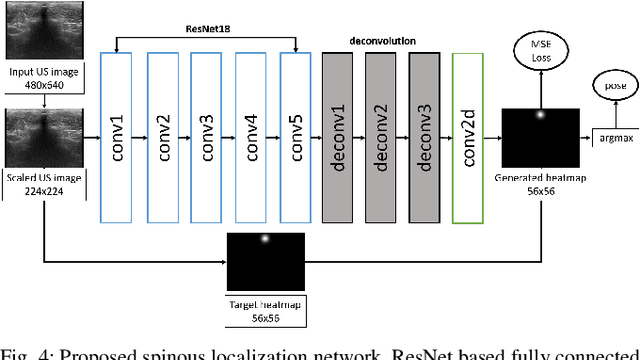
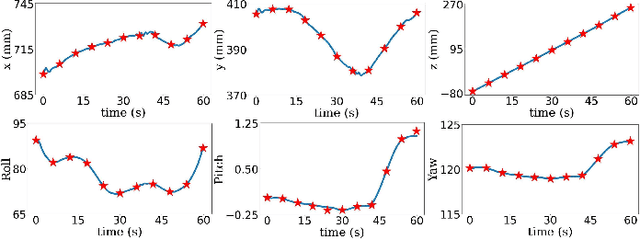
The scoliosis progression in adolescents requires close monitoring to timely take treatment measures. Ultrasound imaging is a radiation-free and low-cost alternative in scoliosis assessment to X-rays, which are typically used in clinical practice. However, ultrasound images are prone to speckle noises, making it challenging for sonographers to detect bony features and follow the spine's curvature. This paper introduces a robotic-ultrasound approach for spinal curvature tracking and automatic navigation. A fully connected network with deconvolutional heads is developed to locate the spinous process efficiently with real-time ultrasound images. We use this machine learning-based method to guide the motion of the robot-held ultrasound probe and follow the spinal curvature while capturing ultrasound images and correspondent position. We developed a new force-driven controller that automatically adjusts the probe's pose relative to the skin surface to ensure a good acoustic coupling between the probe and skin. After the scanning, the acquired data is used to reconstruct the coronal spinal image, where the deformity of the scoliosis spine can be assessed and measured. To evaluate the performance of our methodology, we conducted an experimental study with human subjects where the deviations from the image center during the robotized procedure are compared to that obtained from manual scanning. The angles of spinal deformity measured on spinal reconstruction images were similar for both methods, implying that they equally reflect human anatomy.
A Multi-Sensor Interface to Improve the Teaching and Learning Experience in Arc Welding Training Tasks
Sep 10, 2021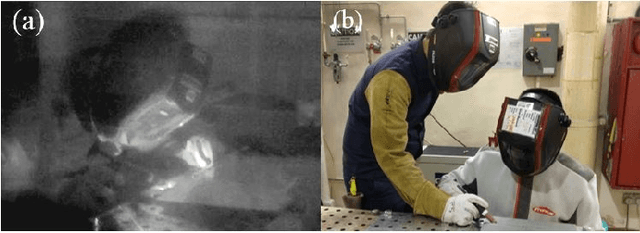
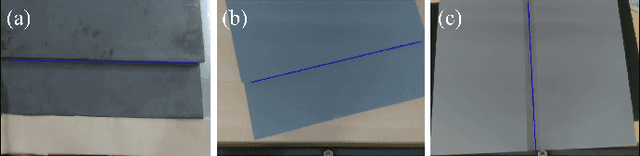
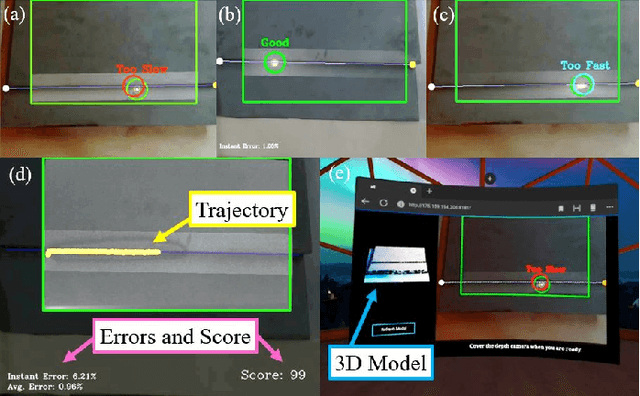
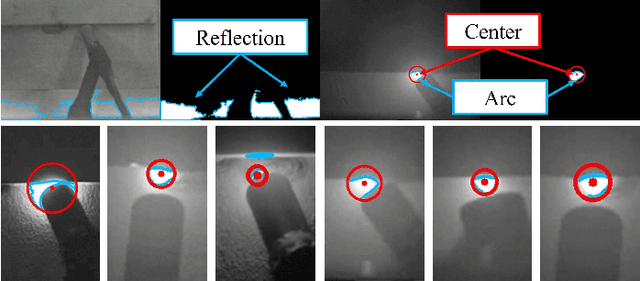
This paper presents the development of a multi-sensor extended reality platform to improve the teaching and learning experience of arc welding tasks. Traditional methods to acquire hand-eye welding coordination skills are typically conducted through one-to-one instruction where trainees/trainers must wear protective helmets and conduct several hands-on tests with metal workpieces. This approach is inefficient as the harmful light emitted from the electric arc impedes the close monitoring of the welding process (practitioners can only observe a small bright spot and most geometric information cannot be perceived). To tackle these problems, some recent training approaches have leveraged on virtual reality (VR) as a way to safely simulate the process and visualize the geometry of the workpieces. However, the synthetic nature of the virtual simulation reduces the effectiveness of the platform; It fails to comprise actual interactions with the welding environment, which may hinder the learning process of a trainee. To incorporate a real welding experience, in this work we present a new automated multi-sensor extended reality platform for arc welding training. It consists of three components: (1) An HDR camera, monitoring the real welding spot in real-time; (2) A depth sensor, capturing the 3D geometry of the scene; and (3) A head-mounted VR display, visualizing the process safely. Our innovative platform provides trainees with a "bot trainer", virtual cues of the seam geometry, automatic spot tracking, and a performance score. To validate the platform's feasibility, we conduct extensive experiments with several welding training tasks. We show that compared with the traditional training practice and recent virtual reality approaches, our automated method achieves better performances in terms of accuracy, learning curve, and effectiveness.
Can a Tesla Turbine be Utilised as a Non-Magnetic Actuator for MRI-Guided Robotic Interventions?
Aug 19, 2021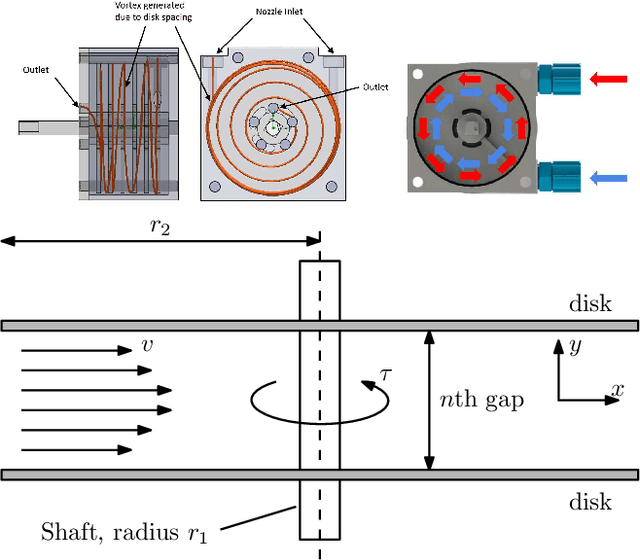

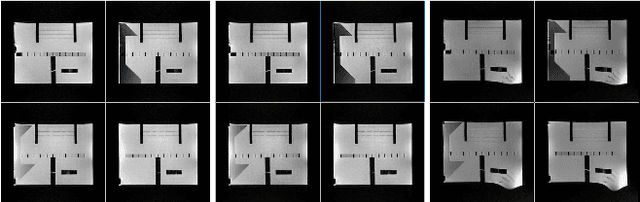
This paper introduces a new type of nonmagnetic actuator for MRI interventions. Ultrasonic and piezoelectric motors are one the most commonly used actuators in MRI applications. However, most of these actuators are only MRI-safe, which means they cannot be operated while imaging as they cause significant visual artifacts. To cope with this issue, we developed a new pneumatic rotary servo-motor (based on the Tesla turbine) that can be effectively used during continuous MR imaging. We thoroughly tested the performance and magnetic properties of our MRI-compatible actuator with several experiments, both inside and outside an MRI scanner. The reported results confirm the feasibility to use this motor for MRI-guided robotic interventions.
Towards a Multispectral RGB-IR-UV-D Vision System -- Seeing the Invisible in 3D
Aug 19, 2021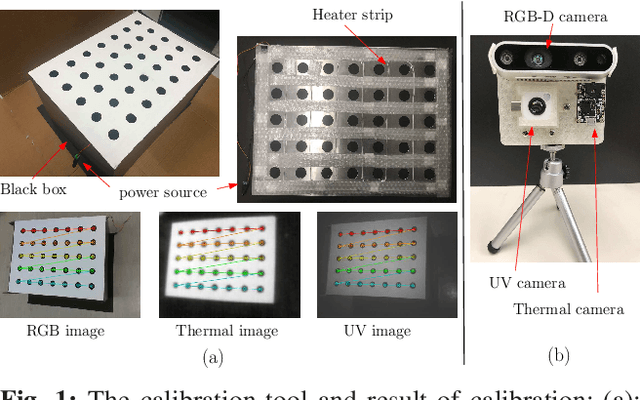
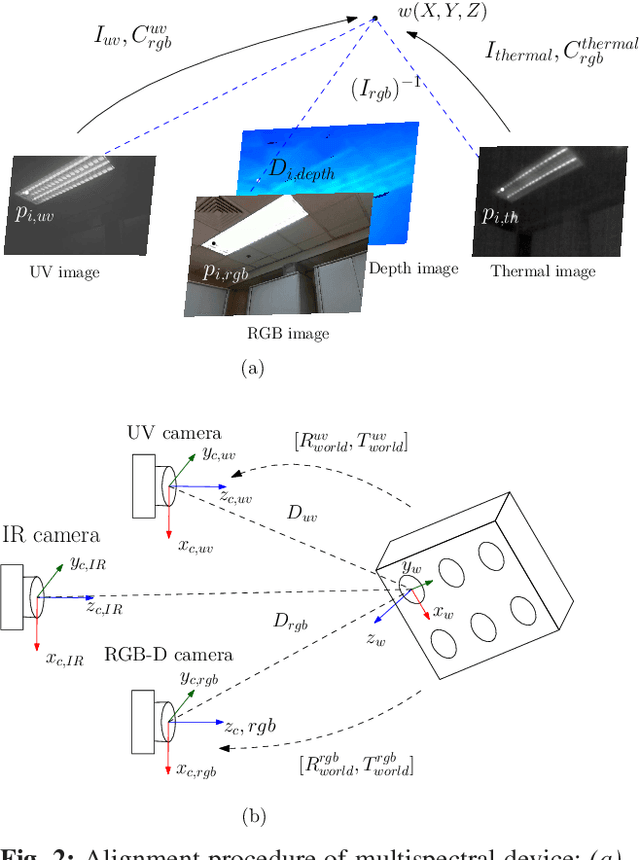
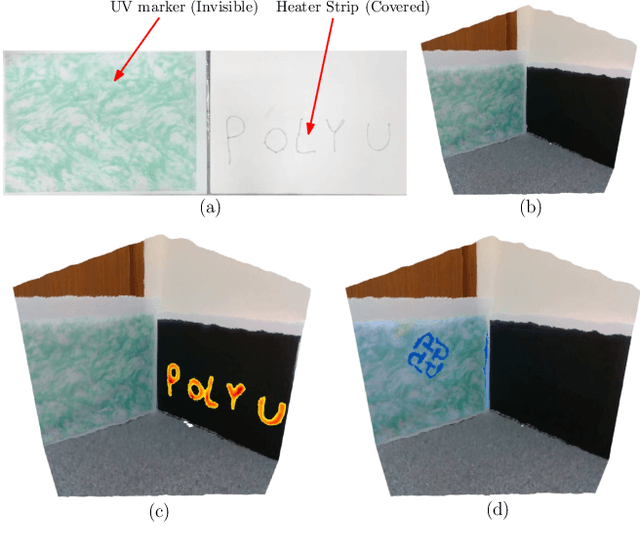
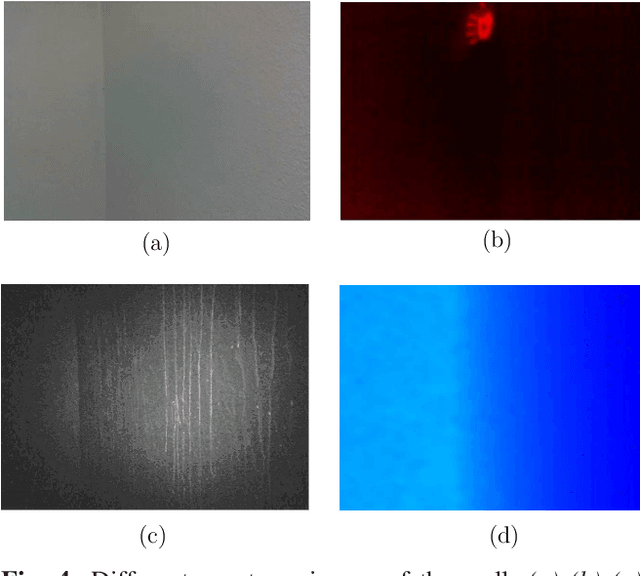
In this paper, we present the development of a sensing system with the capability to compute multispectral point clouds in real-time. The proposed multi-eye sensor system effectively registers information from the visible, (long-wave) infrared, and ultraviolet spectrum to its depth sensing frame, thus enabling to measure a wider range of surface features that are otherwise hidden to the naked eye. For that, we designed a new cross-calibration apparatus that produces consistent features which can be sensed by each of the cameras, therefore, acting as a multispectral "chessboard". The performance of the sensor is evaluated with two different cases of studies, where we show that the proposed system can detect "hidden" features of a 3D environment.