 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Reconfigurable Soft-Rigid Mobile Agent with Variable Stiffness and Adaptive Morphology
Oct 16, 2022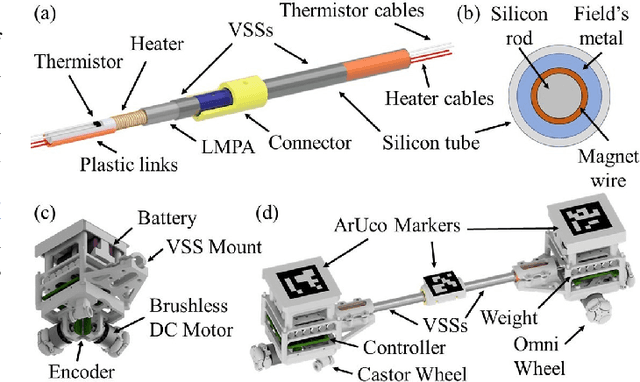
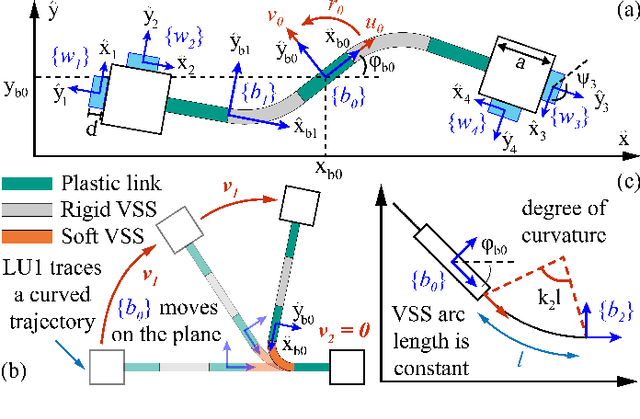
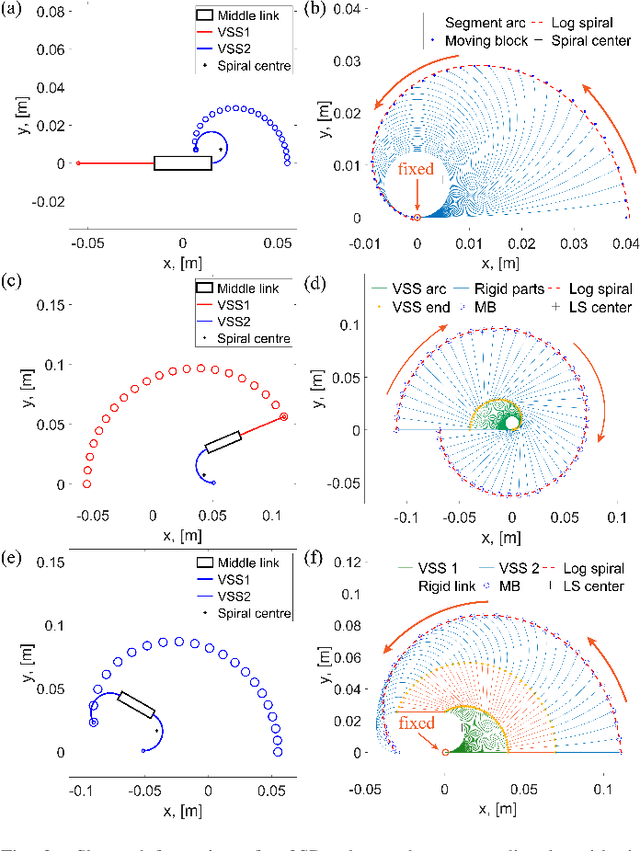
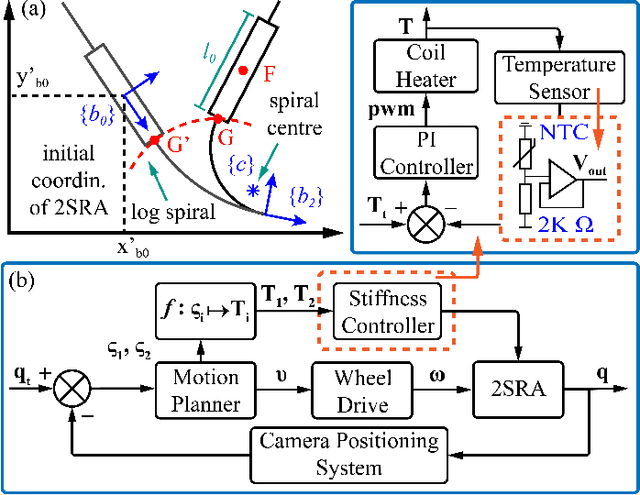
In this paper, we propose a novel design of a hybrid mobile robot with controllable stiffness and deformable shape. Compared to conventional mobile agents, our system can switch between rigid and compliant phases by solidifying or melting Field's metal in its structure and, thus, alter its shape through the motion of its active components. In the soft state, the robot's main body can bend into circular arcs, which enables it to conform to surrounding curved objects. This variable geometry of the robot creates new motion modes which cannot be described by standard (i.e., fixed geometry) models. To this end, we develop a unified mathematical model that captures the differential kinematics of both rigid and soft states. An optimised control strategy is further proposed to select the most appropriate phase states and motion modes needed to reach a target pose-shape configuration. The performance of our new method is validated with numerical simulations and experiments conducted on a prototype system. The simulation source code is available at https://github.com/Louashka/2sr-agent-simulation.git}{GitHub repository.
Can a Tesla Turbine be Utilised as a Non-Magnetic Actuator for MRI-Guided Robotic Interventions?
Aug 19, 2021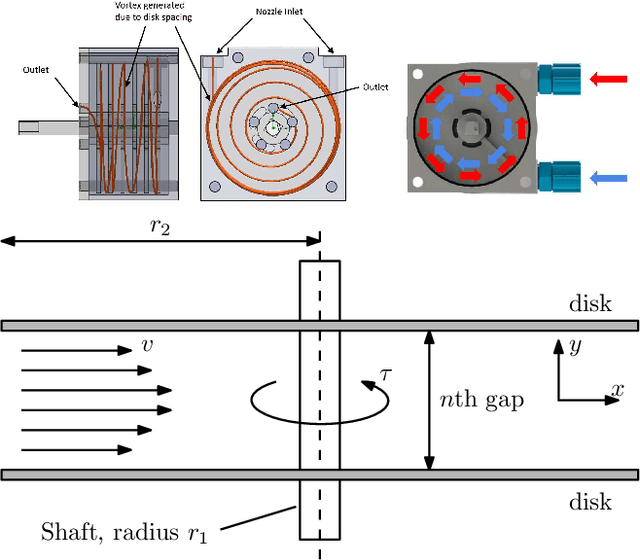

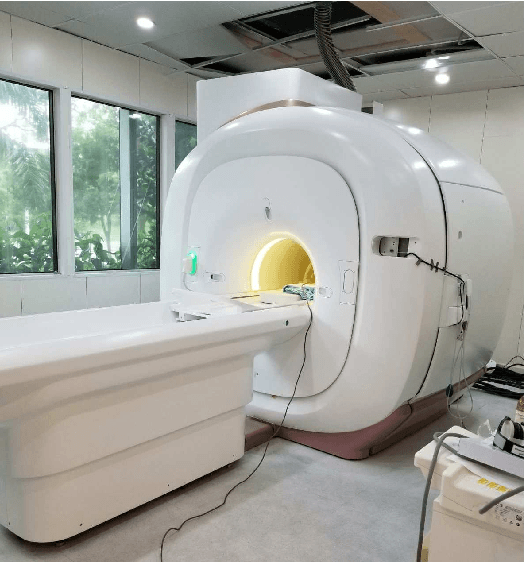
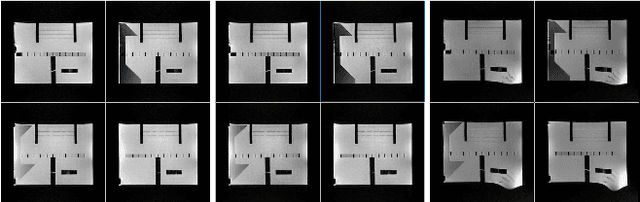
This paper introduces a new type of nonmagnetic actuator for MRI interventions. Ultrasonic and piezoelectric motors are one the most commonly used actuators in MRI applications. However, most of these actuators are only MRI-safe, which means they cannot be operated while imaging as they cause significant visual artifacts. To cope with this issue, we developed a new pneumatic rotary servo-motor (based on the Tesla turbine) that can be effectively used during continuous MR imaging. We thoroughly tested the performance and magnetic properties of our MRI-compatible actuator with several experiments, both inside and outside an MRI scanner. The reported results confirm the feasibility to use this motor for MRI-guided robotic interventions.
A Novel Approach to Model the Kinematics of Human Fingers Based on an Elliptic Multi-Joint Configuration
Jul 30, 2021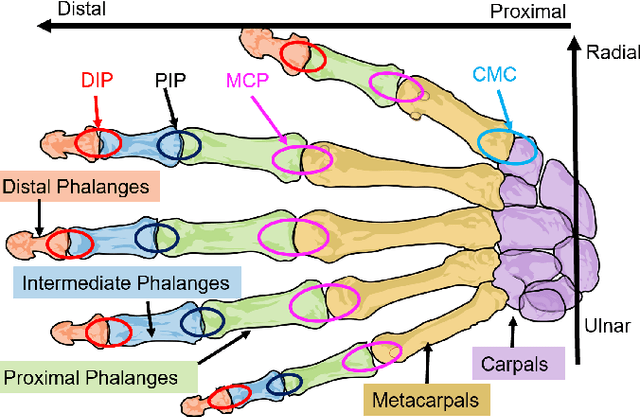
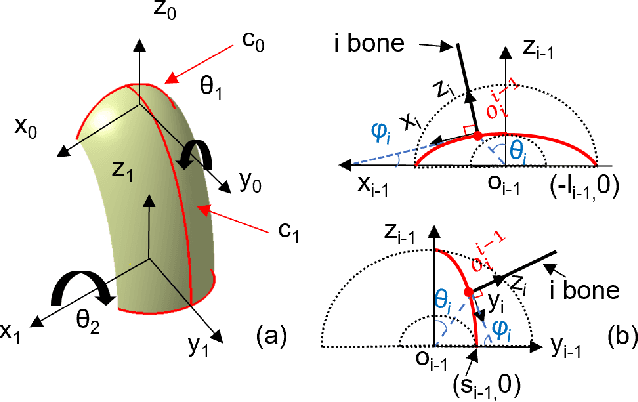
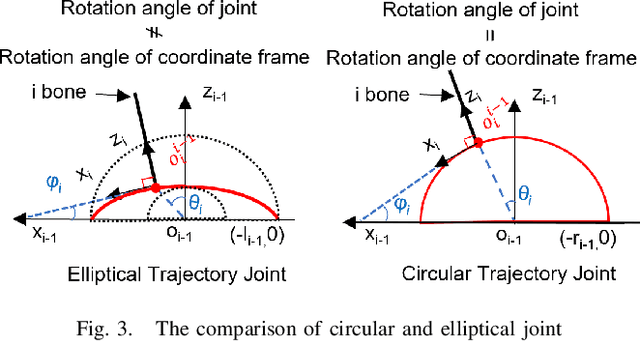
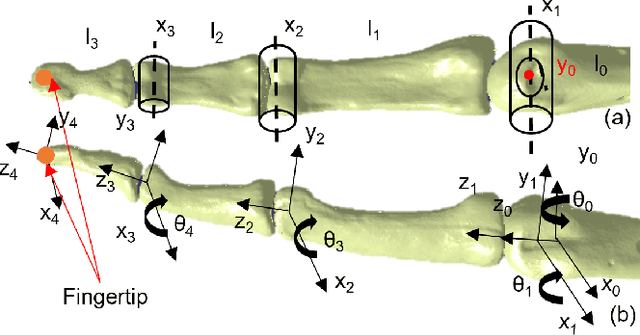
In this paper, we present a novel kinematic model of the human phalanges based on the elliptical motion of their joints. The presence of the soft elastic tissues and the general anatomical structure of the hand joints highly affect the relative movement of the bones. Commonly used assumption of circular trajectories simplifies the designing process but leads to divergence with the actual hand behavior. The advantages of the proposed model are demonstrated through the comparison with the conventional revolute joint model. Conducted simulations and experiments validate designed forward and inverse kinematic algorithms. Obtained results show a high performance of the model in mimicking the human fingertip motion trajectory.
Bio-Inspired Design of Artificial Striated Muscles Composed of Sarcomere-Like Contraction Units (preprint)
Mar 17, 2021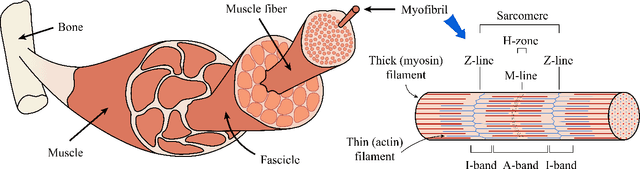

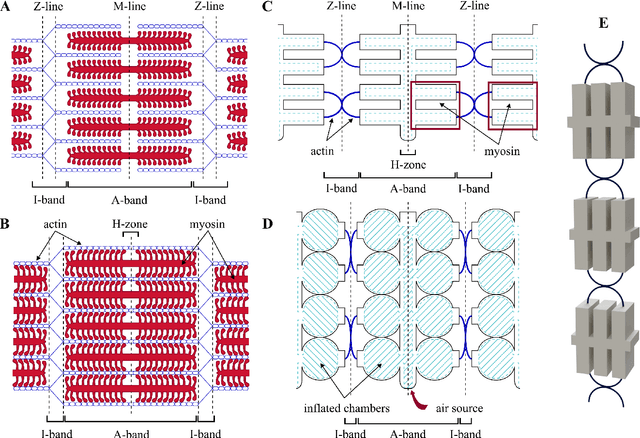
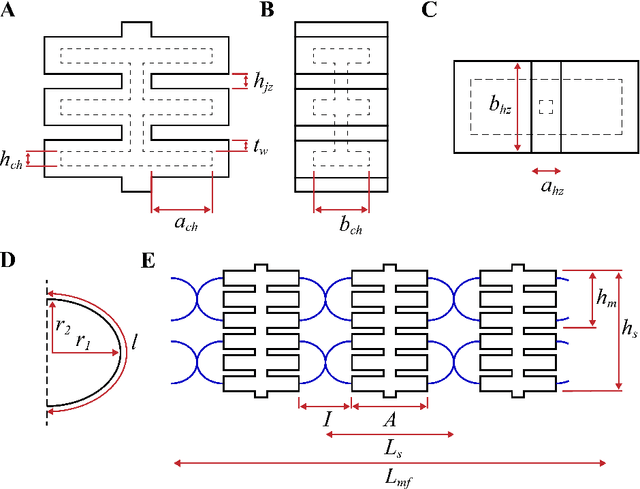
Biological muscles have always attracted robotics researchers due to their efficient capabilities in compliance, force generation, and mechanical work. Many groups are working on the development of artificial muscles, however, state-of-the-art methods still fall short in performance when compared with their biological counterpart. Muscles with high force output are mostly rigid, whereas traditional soft actuators take much space and are limited in strength and producing displacement. In this work, we aim to find a reasonable trade-off between these features by mimicking the striated structure of skeletal muscles. For that, we designed an artificial pneumatic myofibril composed of multiple contraction units that combine stretchable and inextensible materials. Varying the geometric parameters and the number of units in series provides flexible adjustment of the desired muscle operation. We derived a mathematical model that predicts the relationship between the input pneumatic pressure and the generated output force. A detailed experimental study is conducted to validate the performance of the proposed bio-inspired muscle.
TeslaMirror: Multistimulus Encounter-Type Haptic Display for Shape and Texture Rendering in VR
Jul 05, 2020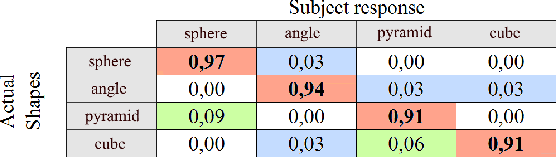
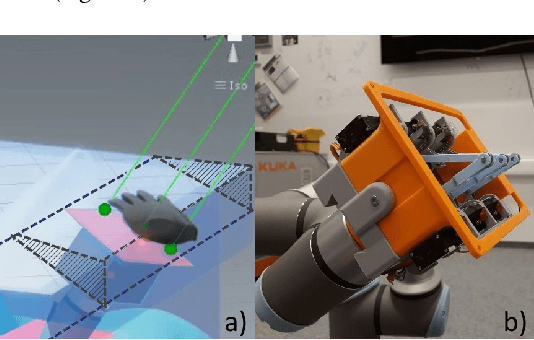
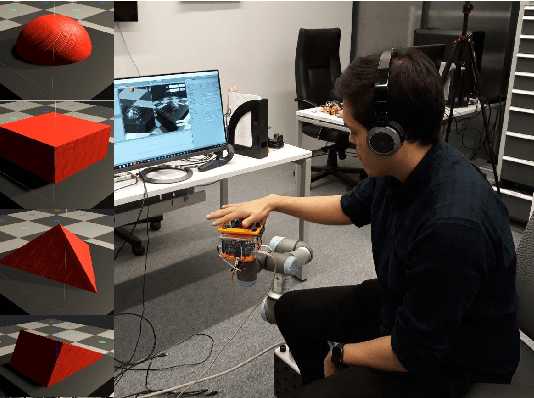
This paper proposes a novel concept of a hybrid tactile display with multistimulus feedback, allowing the real-time experience of the position, shape, and texture of the virtual object. The key technology of the TeslaMirror is that we can deliver the sensation of object parameters (pressure, vibration, and electrotactile feedback) without any wearable haptic devices. We developed the full digital twin of the 6 DOF UR robot in the virtual reality (VR) environment, allowing the adaptive surface simulation and control of the hybrid display in real-time. The preliminary user study was conducted to evaluate the ability of TeslaMirror to reproduce shape sensations with the under-actuated end-effector. The results revealed that potentially this approach can be used in the virtual systems for rendering versatile VR shapes with high fidelity haptic experience.
SwarmCloak: Landing of Two Micro-Quadrotors on Human Hands Using Wearable Tactile Interface Driven by Light Intensity
Jan 31, 2020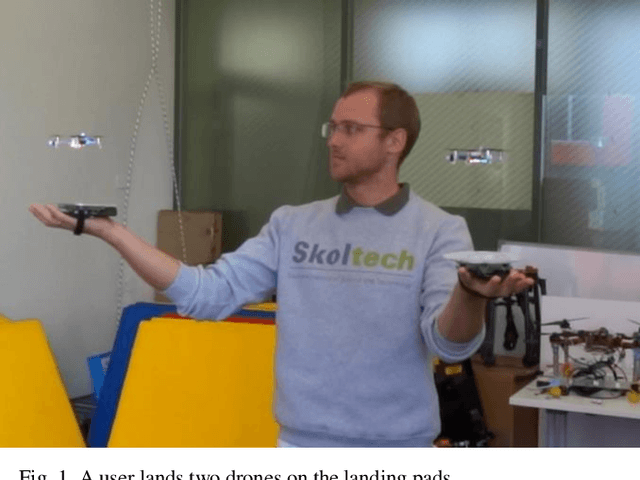
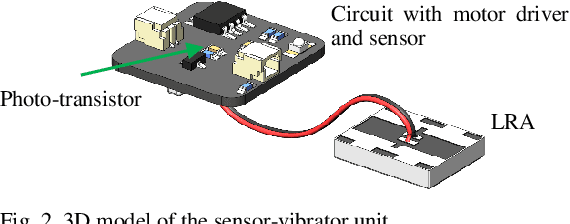
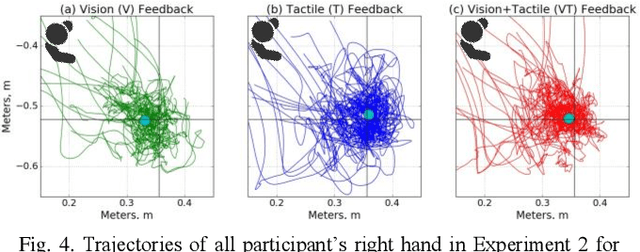
For the human operator, it is often easier and faster to catch a small size quadrotor right in the midair instead of landing it on a surface. However, interaction strategies for such cases have not yet been considered properly, especially when more than one drone has to be landed at the same time. In this paper, we propose a novel interaction strategy to land multiple robots on the human hands using vibrotactile feedback. We developed a wearable tactile display that is activated by the intensity of light emitted from an LED ring on the bottom of the quadcopter. We conducted experiments, where participants were asked to adjust the position of the palm to land one or two vertically-descending drones with different landing speeds, by having only visual feedback, only tactile feedback or visual-tactile feedback. We conducted statistical analysis of the drone landing positions, landing pad and human head trajectories. Two-way ANOVA showed a statistically significant difference between the feedback conditions. Experimental analysis proved that with an increasing number of drones, tactile feedback plays a more important role in accurate hand positioning and operator's convenience. The most precise landing of one and two drones was achieved with the combination of tactile and visual feedback.
SwarmCloak: Landing of a Swarm of Nano-Quadrotors on Human Arms
Nov 22, 2019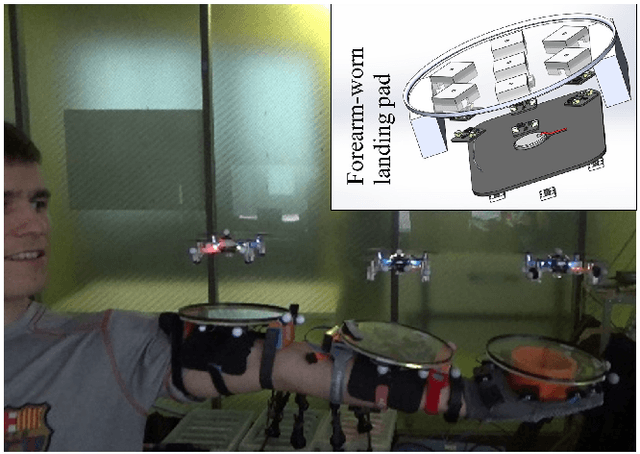
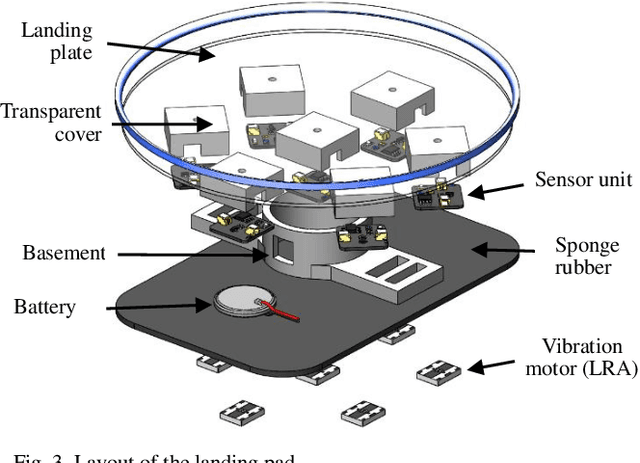
We propose a novel system SwarmCloak for landing of a fleet of four flying robots on the human arms using light-sensitive landing pads with vibrotactile feedback. We developed two types of wearable tactile displays with vibromotors which are activated by the light emitted from the LED array at the bottom of quadcopters. In a user study, participants were asked to adjust the position of the arms to land up to two drones, having only visual feedback, only tactile feedback or visual-tactile feedback. The experiment revealed that when the number of drones increases, tactile feedback plays a more important role in accurate landing and operator's convenience. An important finding is that the best landing performance is achieved with the combination of tactile and visual feedback. The proposed technology could have a strong impact on the human-swarm interaction, providing a new level of intuitiveness and engagement into the swarm deployment just right from the skin surface.
SwarmTouch: Guiding a Swarm of Micro-Quadrotors with Impedance Control using a Wearable Tactile Interface
Sep 05, 2019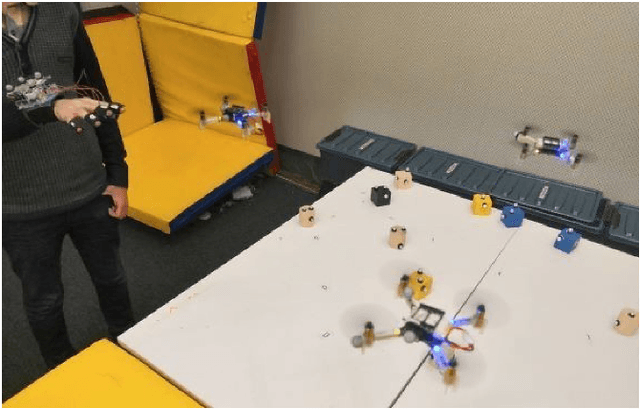
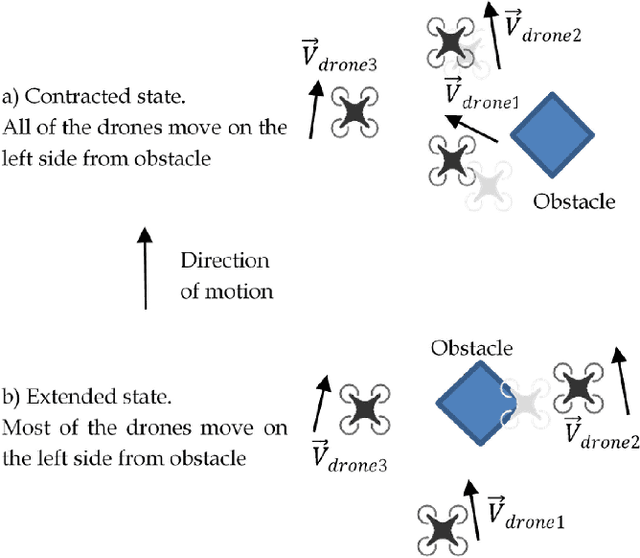
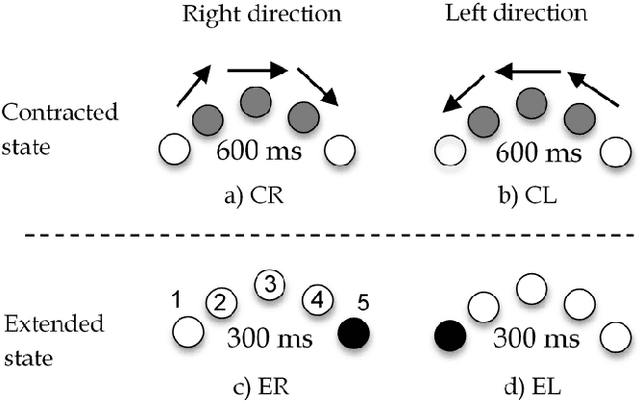
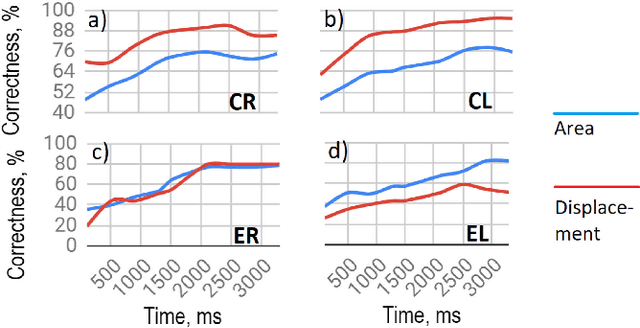
To achieve a smooth and safe guiding of a drone formation by a human operator, we propose a novel interaction strategy for a human-swarm communication which combines impedance control and vibrotactile feedback. The presented approach takes into account the human hand velocity and changes the formation shape and dynamics accordingly using impedance interlinks simulated between quadrotors, which helps to achieve a natural swarm behavior. Several tactile patterns representing static and dynamic parameters of the swarm are proposed. The user feels the state of the swarm at the fingertips and receives valuable information to improve the controllability of the complex formation. A user study revealed the patterns with high recognition rates. A flight experiment demonstrated the possibility to accurately navigate the formation in a cluttered environment using only tactile feedback. Subjects stated that tactile sensation allows guiding the drone formation through obstacles and makes the human-swarm communication more interactive. The proposed technology can potentially have a strong impact on the human-swarm interaction, providing a higher level of awareness during the swarm navigation.
* \c{opyright} 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
SwarmTouch: Tactile Interaction of Human with Impedance Controlled Swarm of Nano-Quadrotors
Sep 05, 2019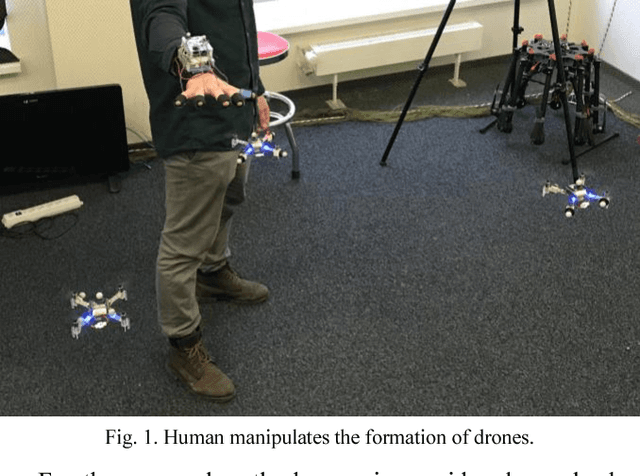
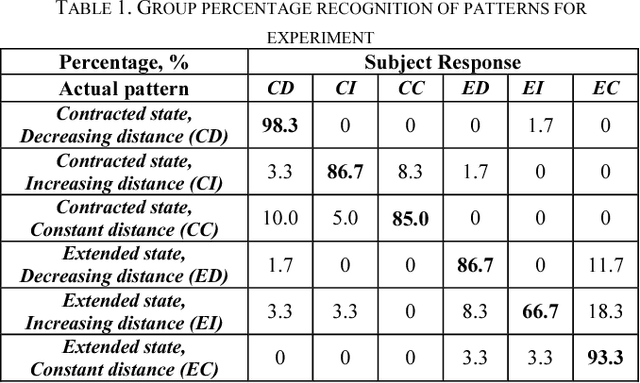
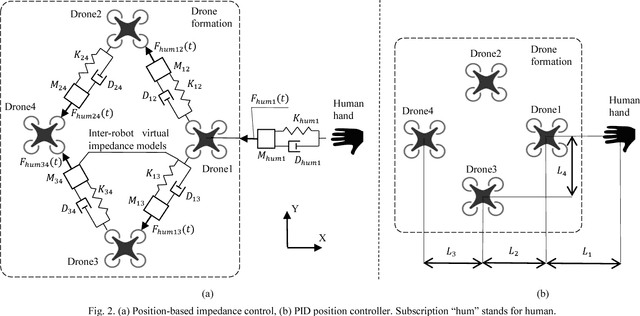
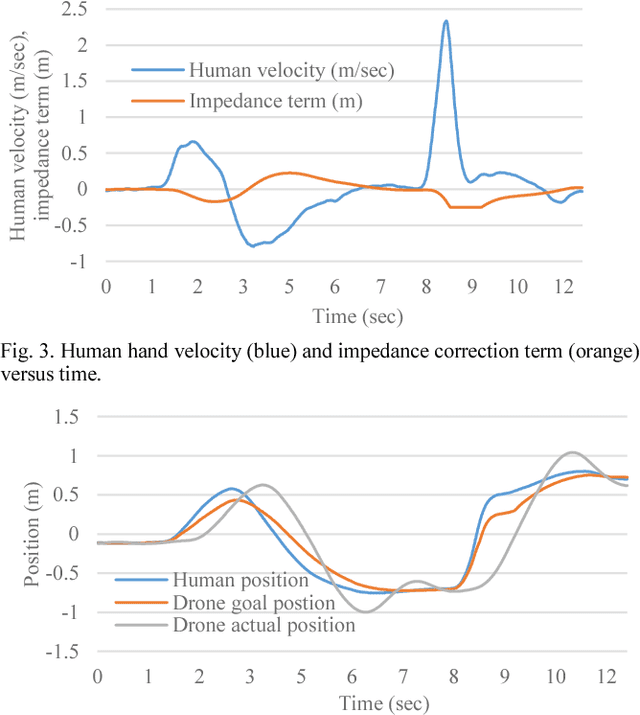
We propose a novel interaction strategy for a human-swarm communication when a human operator guides a formation of quadrotors with impedance control and receives vibrotactile feedback. The presented approach takes into account the human hand velocity and changes the formation shape and dynamics accordingly using impedance interlinks simulated between quadrotors, which helps to achieve a life-like swarm behavior. Experimental results with Crazyflie 2.0 quadrotor platform validate the proposed control algorithm. The tactile patterns representing dynamics of the swarm (extension or contraction) are proposed. The user feels the state of the swarm at his fingertips and receives valuable information to improve the controllability of the complex life-like formation. The user study revealed the patterns with high recognition rates. Subjects stated that tactile sensation improves the ability to guide the drone formation and makes the human-swarm communication much more interactive. The proposed technology can potentially have a strong impact on the human-swarm interaction, providing a new level of intuitiveness and immersion into the swarm navigation.
* \c{opyright} 2018 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. arXiv admin note: substantial text overlap with arXiv:1909.02298