 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProprioceptive Learning with Soft Polyhedral Networks
Aug 16, 2023



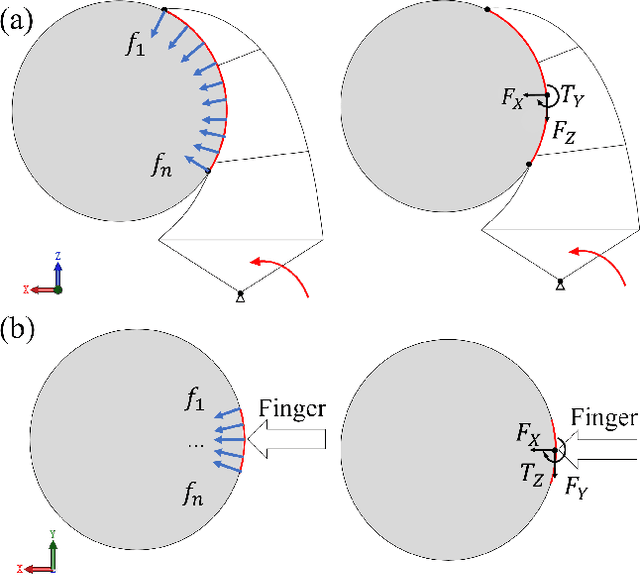
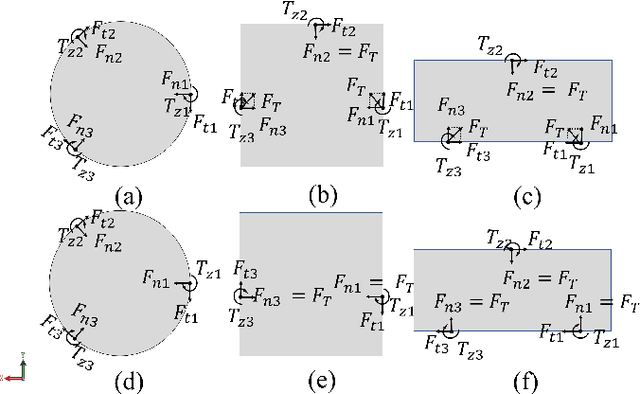
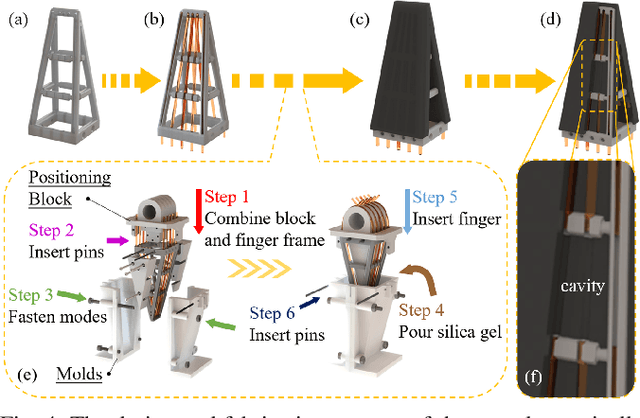
Proprioception is the "sixth sense" that detects limb postures with motor neurons. It requires a natural integration between the musculoskeletal systems and sensory receptors, which is challenging among modern robots that aim for lightweight, adaptive, and sensitive designs at a low cost. Here, we present the Soft Polyhedral Network with an embedded vision for physical interactions, capable of adaptive kinesthesia and viscoelastic proprioception by learning kinetic features. This design enables passive adaptations to omni-directional interactions, visually captured by a miniature high-speed motion tracking system embedded inside for proprioceptive learning. The results show that the soft network can infer real-time 6D forces and torques with accuracies of 0.25/0.24/0.35 N and 0.025/0.034/0.006 Nm in dynamic interactions. We also incorporate viscoelasticity in proprioception during static adaptation by adding a creep and relaxation modifier to refine the predicted results. The proposed soft network combines simplicity in design, omni-adaptation, and proprioceptive sensing with high accuracy, making it a versatile solution for robotics at a low cost with more than 1 million use cycles for tasks such as sensitive and competitive grasping, and touch-based geometry reconstruction. This study offers new insights into vision-based proprioception for soft robots in adaptive grasping, soft manipulation, and human-robot interaction.
Autoencoding a Soft Touch to Learn Grasping from On-land to Underwater
Aug 16, 2023Robots play a critical role as the physical agent of human operators in exploring the ocean. However, it remains challenging to grasp objects reliably while fully submerging under a highly pressurized aquatic environment with little visible light, mainly due to the fluidic interference on the tactile mechanics between the finger and object surfaces. This study investigates the transferability of grasping knowledge from on-land to underwater via a vision-based soft robotic finger that learns 6D forces and torques (FT) using a Supervised Variational Autoencoder (SVAE). A high-framerate camera captures the whole-body deformations while a soft robotic finger interacts with physical objects on-land and underwater. Results show that the trained SVAE model learned a series of latent representations of the soft mechanics transferrable from land to water, presenting a superior adaptation to the changing environments against commercial FT sensors. Soft, delicate, and reactive grasping enabled by tactile intelligence enhances the gripper's underwater interaction with improved reliability and robustness at a much-reduced cost, paving the path for learning-based intelligent grasping to support fundamental scientific discoveries in environmental and ocean research.
Jigsaw-based Benchmarking for Learning Robotic Manipulation
Jun 08, 2023



Benchmarking provides experimental evidence of the scientific baseline to enhance the progression of fundamental research, which is also applicable to robotics. In this paper, we propose a method to benchmark metrics of robotic manipulation, which addresses the spatial-temporal reasoning skills for robot learning with the jigsaw game. In particular, our approach exploits a simple set of jigsaw pieces by designing a structured protocol, which can be highly customizable according to a wide range of task specifications. Researchers can selectively adopt the proposed protocol to benchmark their research outputs, on a comparable scale in the functional, task, and system-level of details. The purpose is to provide a potential look-up table for learning-based robot manipulation, commonly available in other engineering disciplines, to facilitate the adoption of robotics through calculated, empirical, and systematic experimental evidence.
Underwater Intention Recognition using Head Motion and Throat Vibration for Supernumerary Robotic Assistance
Jun 08, 2023



This study presents a multi-modal mechanism for recognizing human intentions while diving underwater, aiming to achieve natural human-robot interactions through an underwater superlimb for diving assistance. The underwater environment severely limits the divers' capabilities in intention expression, which becomes more challenging when they intend to operate tools while keeping control of body postures in 3D with the various diving suits and gears. The current literature is limited in underwater intention recognition, impeding the development of intelligent wearable systems for human-robot interactions underwater. Here, we present a novel solution to simultaneously detect head motion and throat vibrations under the water in a compact, wearable design. Experiment results show that using machine learning algorithms, we achieved high performance in integrating these two modalities to translate human intentions to robot control commands for an underwater superlimb system. This study's results paved the way for future development in underwater intention recognition and underwater human-robot interactions with supernumerary support.
TacGNN:Learning Tactile-based In-hand Manipulation with a Blind Robot
Apr 03, 2023



In this paper, we propose a novel framework for tactile-based dexterous manipulation learning with a blind anthropomorphic robotic hand, i.e. without visual sensing. First, object-related states were extracted from the raw tactile signals by a graph-based perception model - TacGNN. The resulting tactile features were then utilized in the policy learning of an in-hand manipulation task in the second stage. This method was examined by a Baoding ball task - simultaneously manipulating two spheres around each other by 180 degrees in hand. We conducted experiments on object states prediction and in-hand manipulation using a reinforcement learning algorithm (PPO). Results show that TacGNN is effective in predicting object-related states during manipulation by decreasing the RMSE of prediction to 0.096cm comparing to other methods, such as MLP, CNN, and GCN. Finally, the robot hand could finish an in-hand manipulation task solely relying on the robotic own perception - tactile sensing and proprioception. In addition, our methods are tested on three tasks with different difficulty levels and transferred to the real robot without further training.
Kirin: A Quadruped Robot with High Payload Carrying Capability
Feb 21, 2022The quadruped robot is a versatile mobile platform with potential ability for high payload carrying. However, most of the existing quadruped robots aim at high maneuverability, highly dynamic and agile locomotion. In spite of this, payload carrying is still an indispensable ability for the quadruped robots. Design of a quadruped robot with high payload capacity is yet deeply explored. In this study, a 50 kg electrically-actuated quadruped robot, Kirin, is presented to leverage the payload carrying capability. Kirin is an characterized with prismatic quasi-direct-drive (QDD) leg. This mechanism greatly augments the payload carrying capability. This study presents several design principles for the payload-carrying-oriented quadruped robots, including the mechanical design, actuator parameters selection, and locomotion control method. The theoretical analysis implies that the lifting task tends to be a bottleneck for the existing robots with the articulated knee joints. By using prismatic QDD leg, the payload carrying capability of Kirin is enhanced greatly. To demonstrate Kirin's payload carrying capability, in preliminary experiment, up to 125 kg payload lifting in static stance and 50 kg payload carrying in dynamic trotting are tested. Whole body compliance with payload carrying is also demonstrated.
Mapping Human Muscle Force to Supernumerary Robotics Device for Overhead Task Assistance
Jul 29, 2021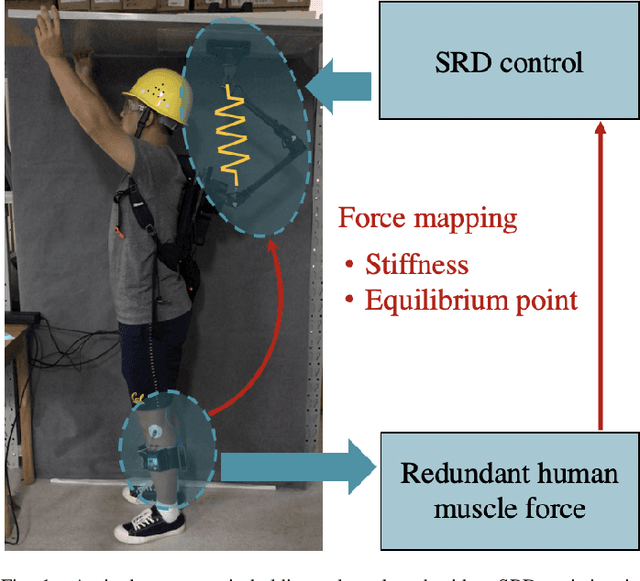
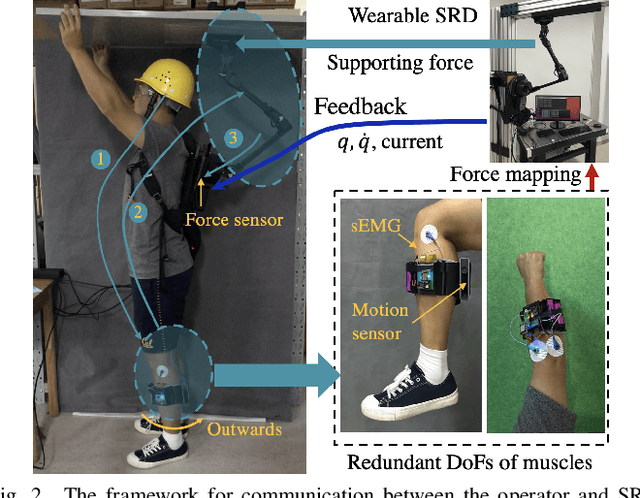
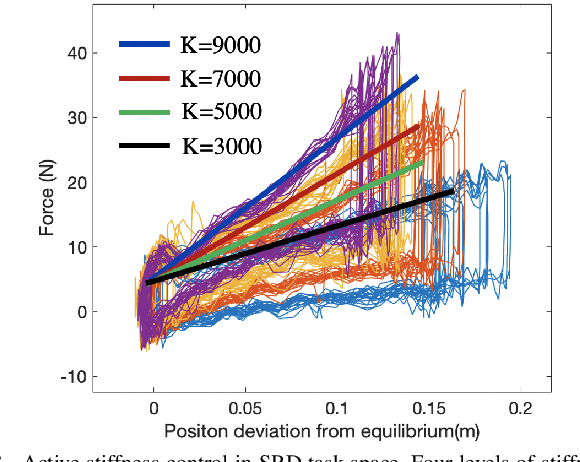
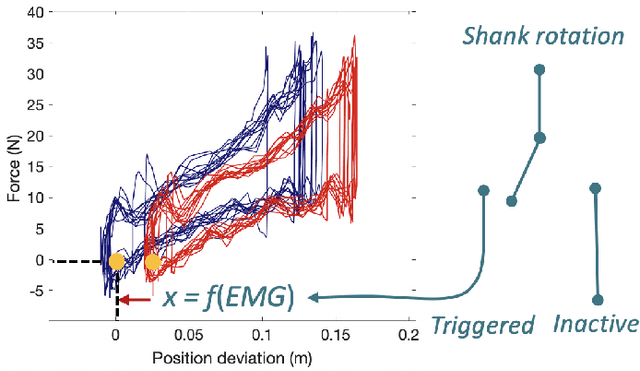
Supernumerary Robotics Device (SRD) is an ideal solution to provide robotic assistance in overhead manual manipulation. Since two arms are occupied for the overhead task, it is desired to have additional arms to assist us in achieving other subtasks such as supporting the far end of a long plate and pushing it upward to fit in the ceiling. In this study, a method that maps human muscle force to SRD for overhead task assistance is proposed. Our methodology is to utilize redundant DoFs such as the idle muscles in the leg to control the supporting force of the SRD. A sEMG device is worn on the operator's shank where muscle signals are measured, parsed, and transmitted to SRD for control. In the control aspect, we adopted stiffness control in the task space based on torque control at the joint level. We are motivated by the fact that humans can achieve daily manipulation merely through simple inherent compliance property in joint driven by muscles. We explore to estimate the force of some particular muscles in humans and control the SRD to imitate the behaviors of muscle and output supporting forces to accomplish the subtasks such as overhead supporting. The sEMG signals detected from human muscles are extracted, filtered, rectified, and parsed to estimate the muscle force. We use this force information as the intent of the operator for proper overhead supporting force. As one of the well-known compliance control methods, stiffness control is easy to achieve using a few of straightforward parameters such as stiffness and equilibrium point. Through tuning the stiffness and equilibrium point, the supporting force of SRD in task space can be easily controlled. The muscle force estimated by sEMG is mapped to the desired force in the task space of the SRD. The desired force is transferred into stiffness or equilibrium point to output the corresponding supporting force.
High-Payload Online Identification and Adaptive Control for an Electrically-actuated Quadruped Robot
Jul 26, 2021
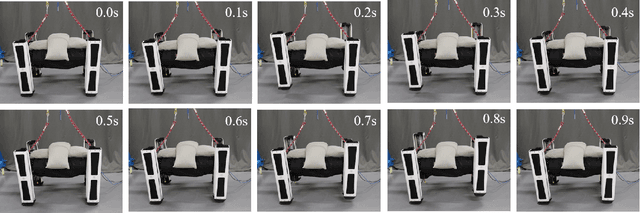
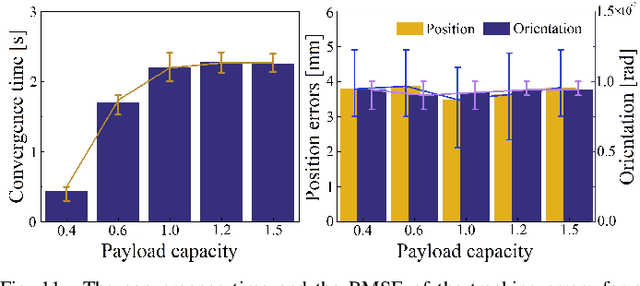
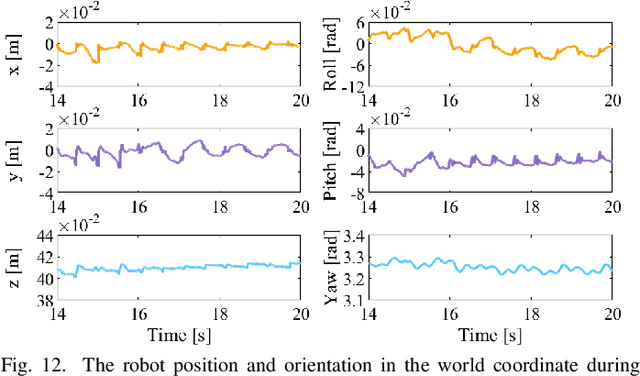
Quadruped robots manifest great potential to traverse rough terrains with payload. Numerous traditional control methods for legged dynamic locomotion are model-based and exhibit high sensitivity to model uncertainties and payload variations. Therefore, high-performance model parameter estimation becomes indispensable. However, the inertia parameters of payload are usually unknown and dynamically changing when the quadruped robot is deployed in versatile tasks. To address this problem, online identification of the inertia parameters and the Center of Mass (CoM) position of the payload for the quadruped robots draw an increasing interest. This study presents an adaptive controller based on the online payload identification for the high payload capacity (the ratio between payload and robot's self-weight) quadruped locomotion. We name it as Adaptive Controller for Quadruped Locomotion (ACQL), which consists of a recursive update law and a control law. ACQL estimates the external forces and torques induced by the payload online. The estimation is incorporated in inverse-dynamics-based Quadratic Programming (QP) to realize a trotting gait. As such, the tracking accuracy of the robot's CoM and orientation trajectories are improved. The proposed method, ACQL, is verified in a real quadruped robot platform. Experiments prove the estimation efficacy for the payload weighing from 20 kg to 75 kg and loaded at different locations of the robot's torso.
Learning-based Optoelectronically Innervated Tactile Finger for Rigid-Soft Interactive Grasping
Jan 29, 2021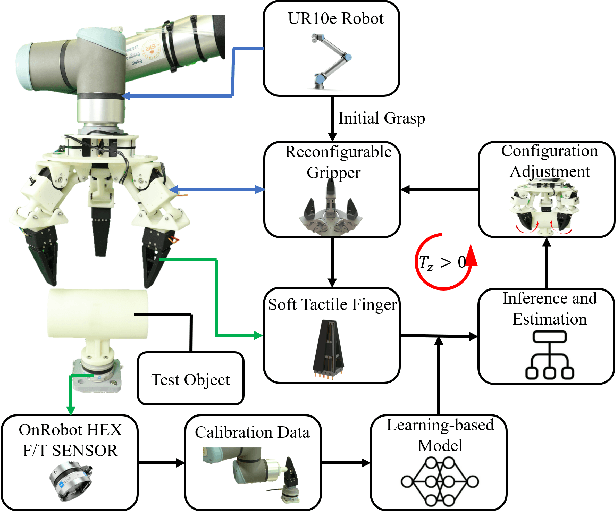
This paper presents a novel design of a soft tactile finger with omni-directional adaptation using multi-channel optical fibers for rigid-soft interactive grasping. Machine learning methods are used to train a model for real-time prediction of force, torque, and contact using the tactile data collected. We further integrated such fingers in a reconfigurable gripper design with three fingers so that the finger arrangement can be actively adjusted in real-time based on the tactile data collected during grasping, achieving the process of rigid-soft interactive grasping. Detailed sensor calibration and experimental results are also included to further validate the proposed design for enhanced grasping robustness.
Design of an Optoelectronically Innervated Gripper for Rigid-Soft Interactive Grasping
Dec 06, 2020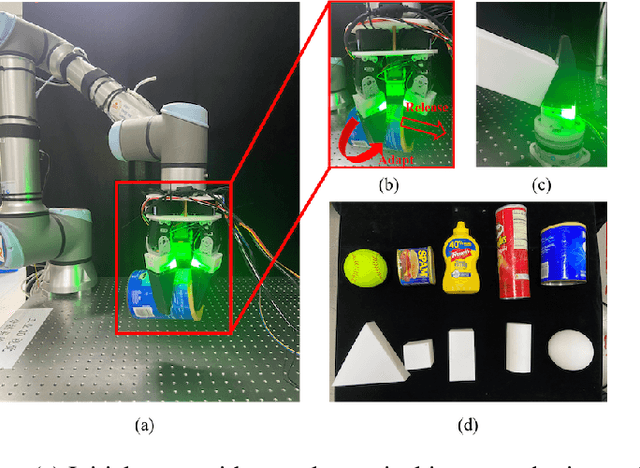
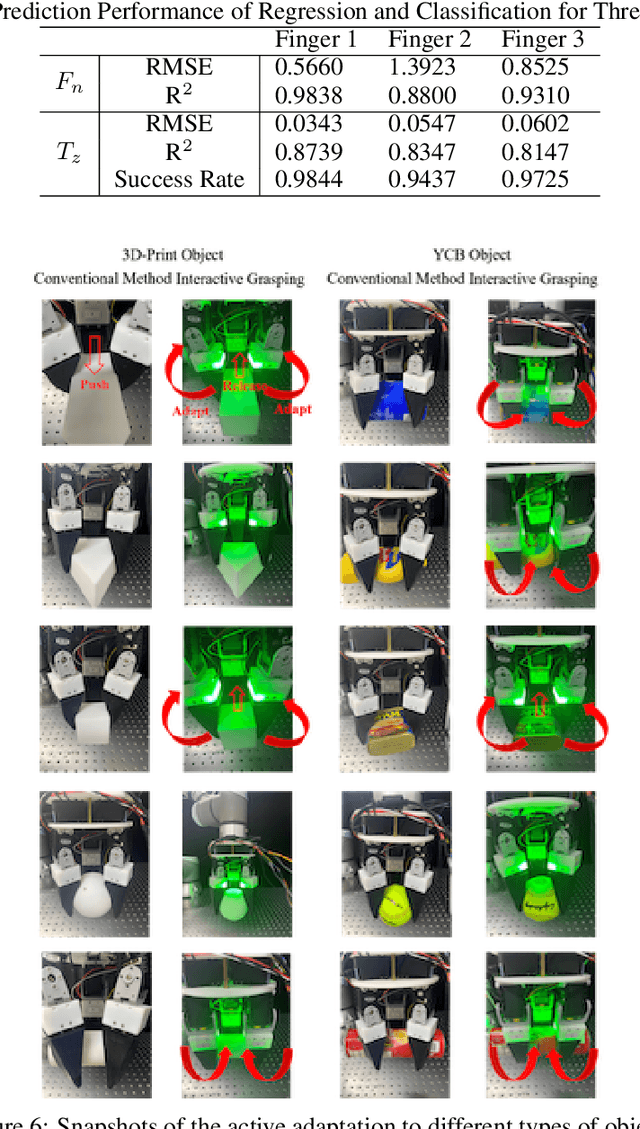
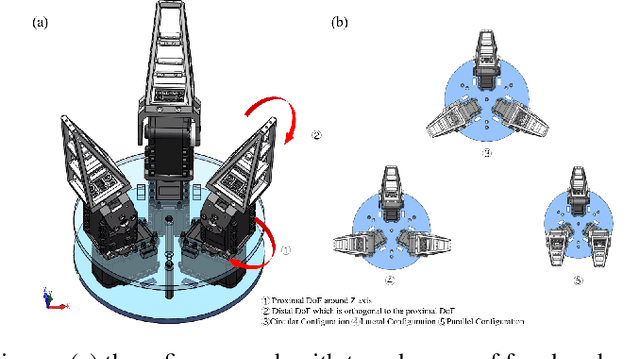
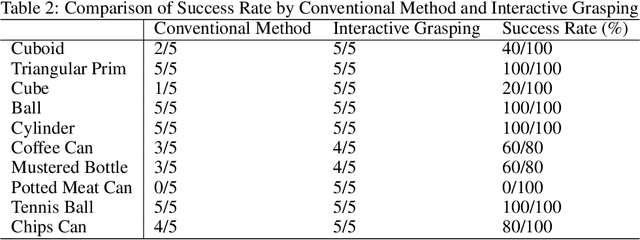
Over the past few decades, efforts have been made towards robust robotic grasping, and therefore dexterous manipulation. The soft gripper has shown their potential in robust grasping due to their inherent properties-low, control complexity, and high adaptability. However, the deformation of the soft gripper when interacting with objects bring inaccuracy of grasped objects, which causes instability for robust grasping and further manipulation. In this paper, we present an omni-directional adaptive soft finger that can sense deformation based on embedded optical fibers and the application of machine learning methods to interpret transmitted light intensities. Furthermore, to use tactile information provided by a soft finger, we design a low-cost and multi degrees of freedom gripper to conform to the shape of objects actively and optimize grasping policy, which is called Rigid-Soft Interactive Grasping. Two main advantages of this grasping policy are provided: one is that a more robust grasping could be achieved through an active adaptation; the other is that the tactile information collected could be helpful for further manipulation.