 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExoplanet Characterization using Conditional Invertible Neural Networks
Jan 31, 2022



The characterization of an exoplanet's interior is an inverse problem, which requires statistical methods such as Bayesian inference in order to be solved. Current methods employ Markov Chain Monte Carlo (MCMC) sampling to infer the posterior probability of planetary structure parameters for a given exoplanet. These methods are time consuming since they require the calculation of a large number of planetary structure models. To speed up the inference process when characterizing an exoplanet, we propose to use conditional invertible neural networks (cINNs) to calculate the posterior probability of the internal structure parameters. cINNs are a special type of neural network which excel in solving inverse problems. We constructed a cINN using FrEIA, which was then trained on a database of $5.6\cdot 10^6$ internal structure models to recover the inverse mapping between internal structure parameters and observable features (i.e., planetary mass, planetary radius and composition of the host star). The cINN method was compared to a Metropolis-Hastings MCMC. For that we repeated the characterization of the exoplanet K2-111 b, using both the MCMC method and the trained cINN. We show that the inferred posterior probability of the internal structure parameters from both methods are very similar, with the biggest differences seen in the exoplanet's water content. Thus cINNs are a possible alternative to the standard time-consuming sampling methods. Indeed, using cINNs allows for orders of magnitude faster inference of an exoplanet's composition than what is possible using an MCMC method, however, it still requires the computation of a large database of internal structures to train the cINN. Since this database is only computed once, we found that using a cINN is more efficient than an MCMC, when more than 10 exoplanets are characterized using the same cINN.
Neural Head Avatars from Monocular RGB Videos
Dec 02, 2021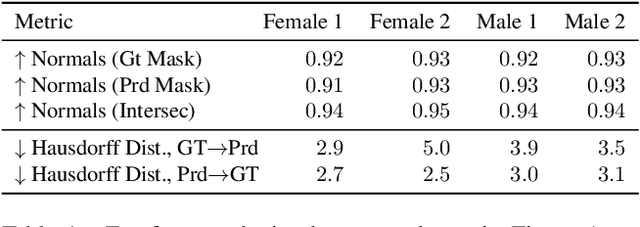
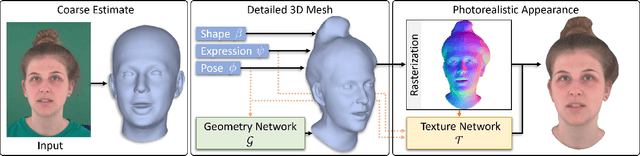
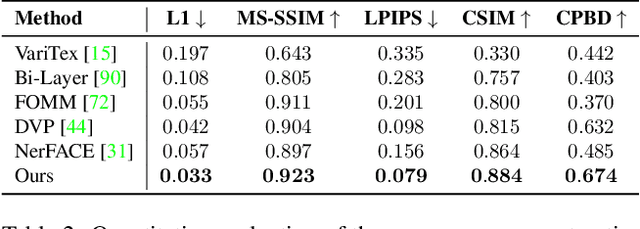
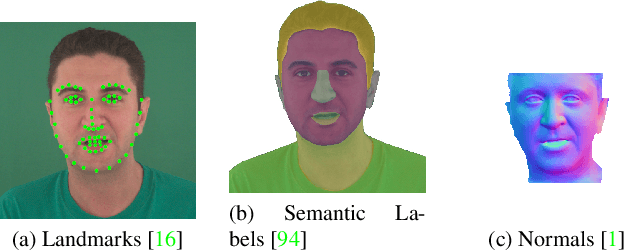
We present Neural Head Avatars, a novel neural representation that explicitly models the surface geometry and appearance of an animatable human avatar that can be used for teleconferencing in AR/VR or other applications in the movie or games industry that rely on a digital human. Our representation can be learned from a monocular RGB portrait video that features a range of different expressions and views. Specifically, we propose a hybrid representation consisting of a morphable model for the coarse shape and expressions of the face, and two feed-forward networks, predicting vertex offsets of the underlying mesh as well as a view- and expression-dependent texture. We demonstrate that this representation is able to accurately extrapolate to unseen poses and view points, and generates natural expressions while providing sharp texture details. Compared to previous works on head avatars, our method provides a disentangled shape and appearance model of the complete human head (including hair) that is compatible with the standard graphics pipeline. Moreover, it quantitatively and qualitatively outperforms current state of the art in terms of reconstruction quality and novel-view synthesis.
Self-Supervised Object Detection via Generative Image Synthesis
Oct 19, 2021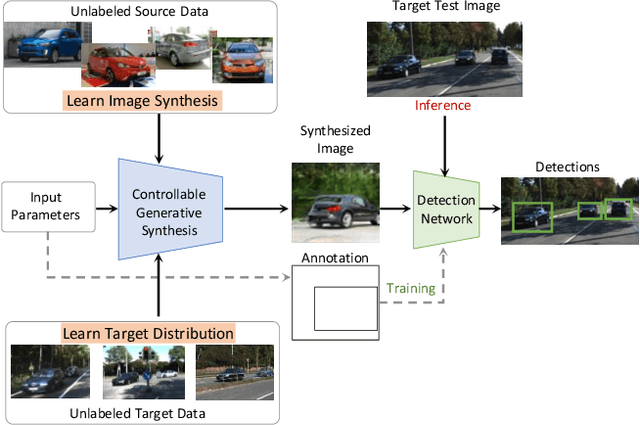
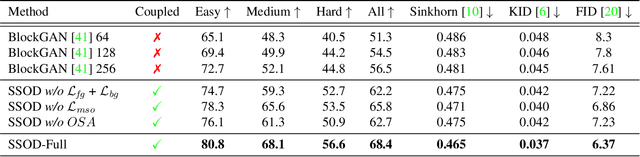
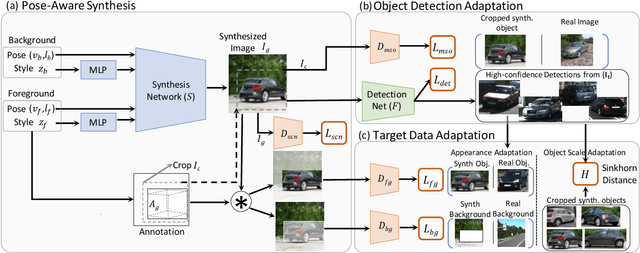
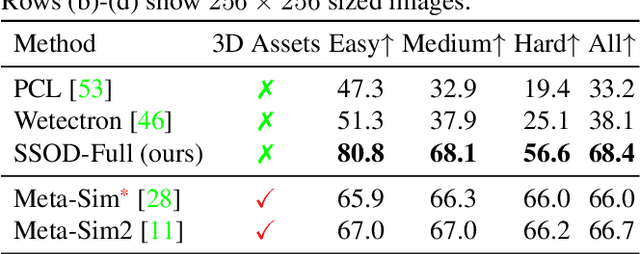
We present SSOD, the first end-to-end analysis-by synthesis framework with controllable GANs for the task of self-supervised object detection. We use collections of real world images without bounding box annotations to learn to synthesize and detect objects. We leverage controllable GANs to synthesize images with pre-defined object properties and use them to train object detectors. We propose a tight end-to-end coupling of the synthesis and detection networks to optimally train our system. Finally, we also propose a method to optimally adapt SSOD to an intended target data without requiring labels for it. For the task of car detection, on the challenging KITTI and Cityscapes datasets, we show that SSOD outperforms the prior state-of-the-art purely image-based self-supervised object detection method Wetectron. Even without requiring any 3D CAD assets, it also surpasses the state-of-the-art rendering based method Meta-Sim2. Our work advances the field of self-supervised object detection by introducing a successful new paradigm of using controllable GAN-based image synthesis for it and by significantly improving the baseline accuracy of the task. We open-source our code at https://github.com/NVlabs/SSOD.
On the Limits of Pseudo Ground Truth in Visual Camera Re-localisation
Sep 01, 2021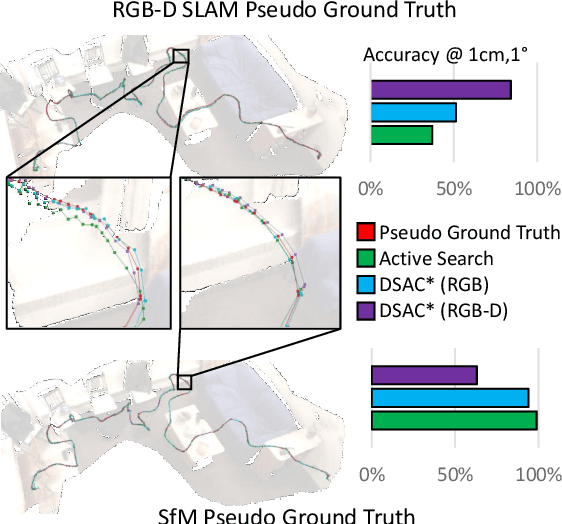
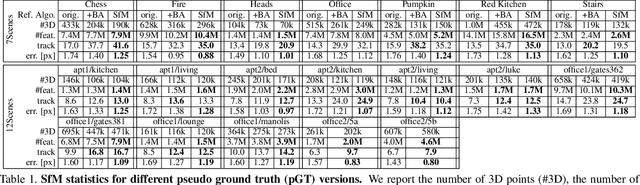
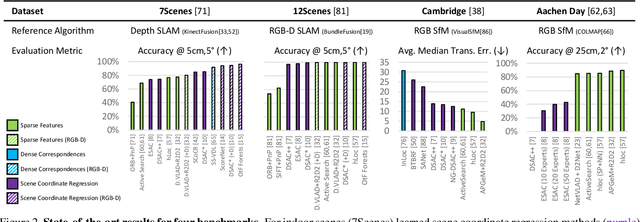

Benchmark datasets that measure camera pose accuracy have driven progress in visual re-localisation research. To obtain poses for thousands of images, it is common to use a reference algorithm to generate pseudo ground truth. Popular choices include Structure-from-Motion (SfM) and Simultaneous-Localisation-and-Mapping (SLAM) using additional sensors like depth cameras if available. Re-localisation benchmarks thus measure how well each method replicates the results of the reference algorithm. This begs the question whether the choice of the reference algorithm favours a certain family of re-localisation methods. This paper analyzes two widely used re-localisation datasets and shows that evaluation outcomes indeed vary with the choice of the reference algorithm. We thus question common beliefs in the re-localisation literature, namely that learning-based scene coordinate regression outperforms classical feature-based methods, and that RGB-D-based methods outperform RGB-based methods. We argue that any claims on ranking re-localisation methods should take the type of the reference algorithm, and the similarity of the methods to the reference algorithm, into account.
Conditional Invertible Neural Networks for Diverse Image-to-Image Translation
May 05, 2021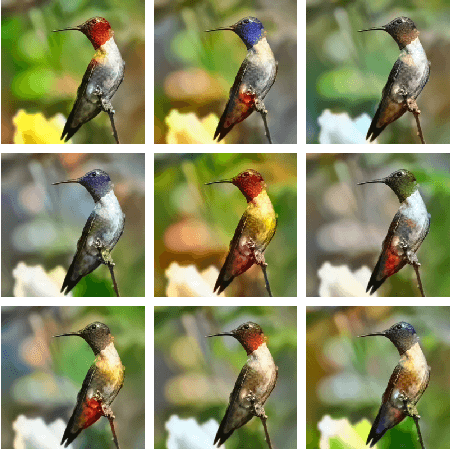

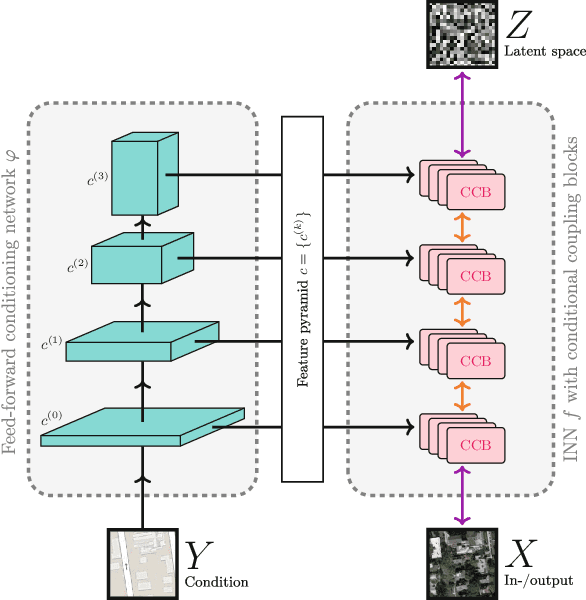
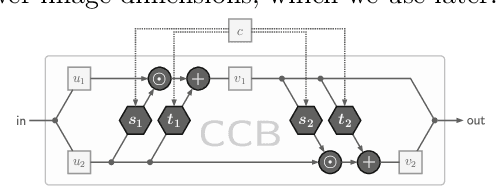
We introduce a new architecture called a conditional invertible neural network (cINN), and use it to address the task of diverse image-to-image translation for natural images. This is not easily possible with existing INN models due to some fundamental limitations. The cINN combines the purely generative INN model with an unconstrained feed-forward network, which efficiently preprocesses the conditioning image into maximally informative features. All parameters of a cINN are jointly optimized with a stable, maximum likelihood-based training procedure. Even though INN-based models have received far less attention in the literature than GANs, they have been shown to have some remarkable properties absent in GANs, e.g. apparent immunity to mode collapse. We find that our cINNs leverage these properties for image-to-image translation, demonstrated on day to night translation and image colorization. Furthermore, we take advantage of our bidirectional cINN architecture to explore and manipulate emergent properties of the latent space, such as changing the image style in an intuitive way.
Fusion Moves for Graph Matching
Feb 05, 2021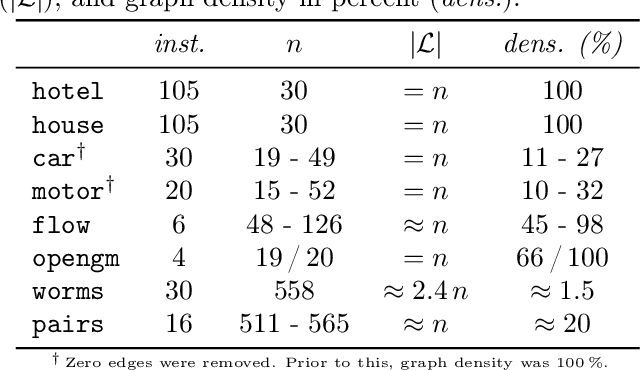
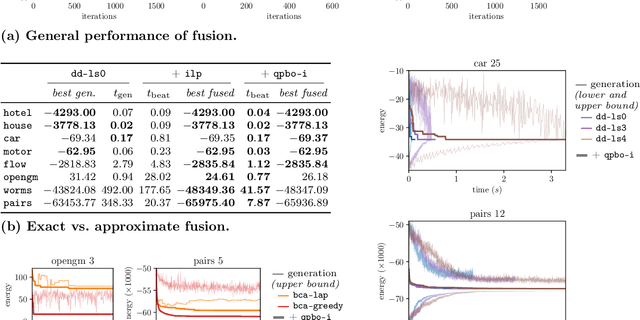
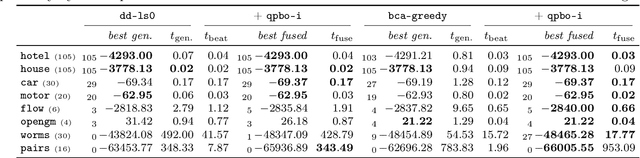

We contribute to approximate algorithms for the quadratic assignment problem also known as graph matching. Inspired by the success of the fusion moves technique developed for multilabel discrete Markov random fields, we investigate its applicability to graph matching. In particular, we show how it can be efficiently combined with the dedicated state-of-the-art Lagrange dual methods that have recently shown superior results in computer vision and bio-imaging applications. As our empirical evaluation on a wide variety of graph matching datasets suggests, fusion moves notably improve performance of these methods in terms of speed and quality of the obtained solutions. Hence, this combination results in a state-of-the-art solver for graph matching.
Benchmarking Invertible Architectures on Inverse Problems
Jan 26, 2021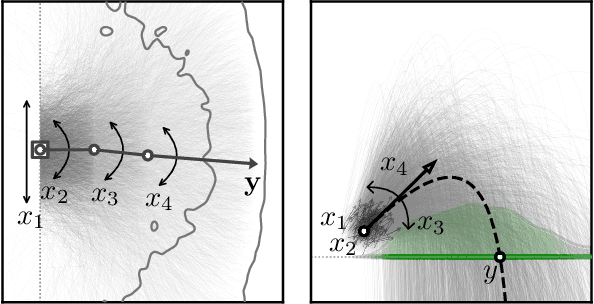
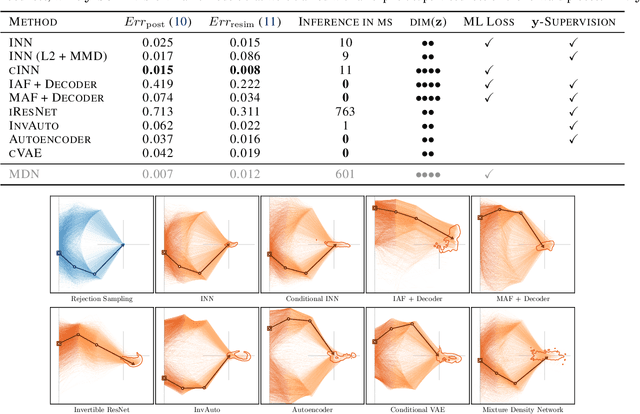
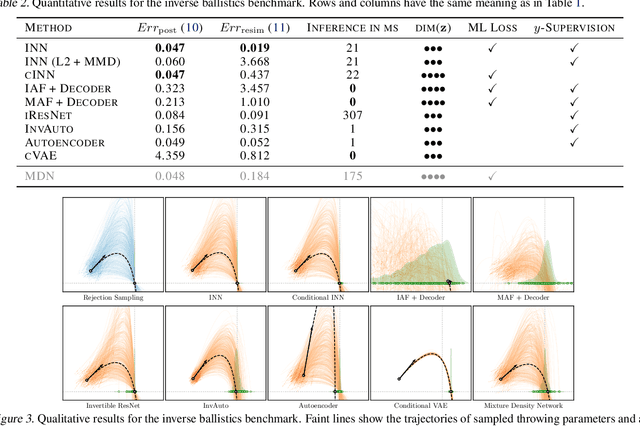
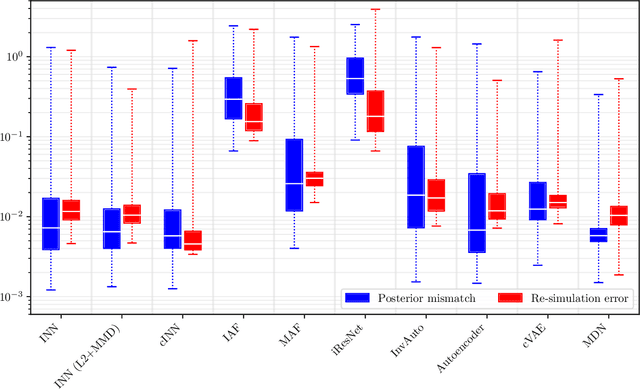
Recent work demonstrated that flow-based invertible neural networks are promising tools for solving ambiguous inverse problems. Following up on this, we investigate how ten invertible architectures and related models fare on two intuitive, low-dimensional benchmark problems, obtaining the best results with coupling layers and simple autoencoders. We hope that our initial efforts inspire other researchers to evaluate their invertible architectures in the same setting and put forth additional benchmarks, so our evaluation may eventually grow into an official community challenge.
Representing Ambiguity in Registration Problems with Conditional Invertible Neural Networks
Dec 15, 2020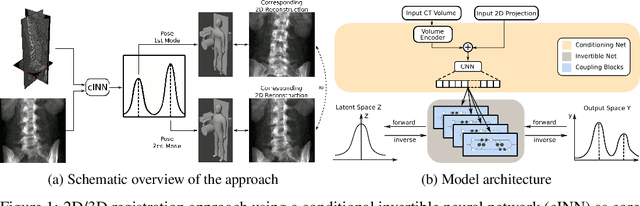
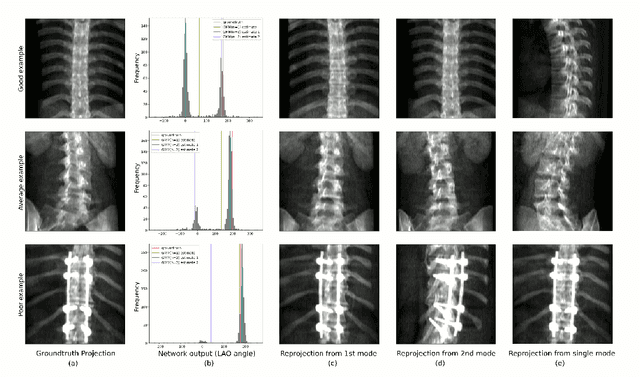
Image registration is the basis for many applications in the fields of medical image computing and computer assisted interventions. One example is the registration of 2D X-ray images with preoperative three-dimensional computed tomography (CT) images in intraoperative surgical guidance systems. Due to the high safety requirements in medical applications, estimating registration uncertainty is of a crucial importance in such a scenario. However, previously proposed methods, including classical iterative registration methods and deep learning-based methods have one characteristic in common: They lack the capacity to represent the fact that a registration problem may be inherently ambiguous, meaning that multiple (substantially different) plausible solutions exist. To tackle this limitation, we explore the application of invertible neural networks (INN) as core component of a registration methodology. In the proposed framework, INNs enable going beyond point estimates as network output by representing the possible solutions to a registration problem by a probability distribution that encodes different plausible solutions via multiple modes. In a first feasibility study, we test the approach for a 2D 3D registration setting by registering spinal CT volumes to X-ray images. To this end, we simulate the X-ray images taken by a C-Arm with multiple orientations using the principle of digitially reconstructed radiographs (DRRs). Due to the symmetry of human spine, there are potentially multiple substantially different poses of the C-Arm that can lead to similar projections. The hypothesis of this work is that the proposed approach is able to identify multiple solutions in such ambiguous registration problems.
Invertible Neural Networks for Uncertainty Quantification in Photoacoustic Imaging
Nov 10, 2020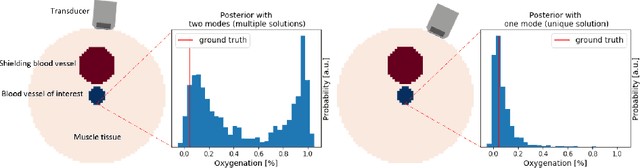
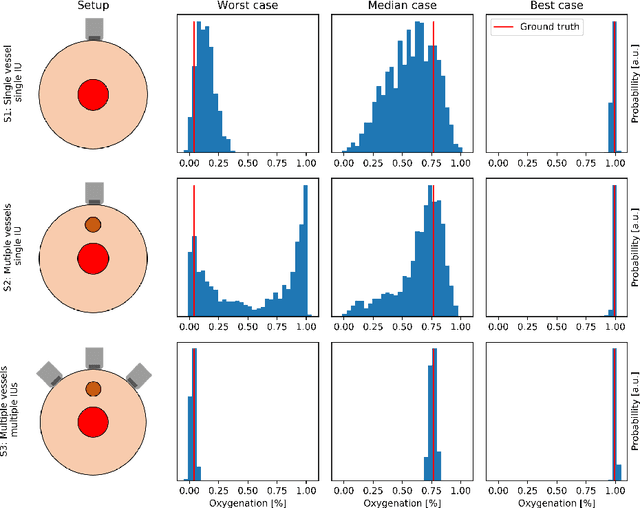
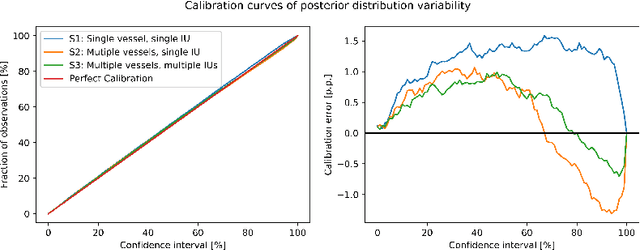
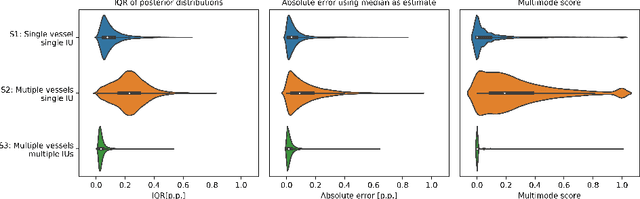
Multispectral photoacoustic imaging (PAI) is an emerging imaging modality which enables the recovery of functional tissue parameters such as blood oxygenation. However, the underlying inverse problems are potentially ill-posed, meaning that radically different tissue properties may - in theory - yield comparable measurements. In this work, we present a new approach for handling this specific type of uncertainty by leveraging the concept of conditional invertible neural networks (cINNs). Specifically, we propose going beyond commonly used point estimates for tissue oxygenation and converting single-pixel initial pressure spectra to the full posterior probability density. This way, the inherent ambiguity of a problem can be encoded with multiple modes in the output. Based on the presented architecture, we demonstrate two use cases which leverage this information to not only detect and quantify but also to compensate for uncertainties: (1) photoacoustic device design and (2) optimization of photoacoustic image acquisition. Our in silico studies demonstrate the potential of the proposed methodology to become an important building block for uncertainty-aware reconstruction of physiological parameters with PAI.
Learning Robust Models Using The Principle of Independent Causal Mechanisms
Oct 14, 2020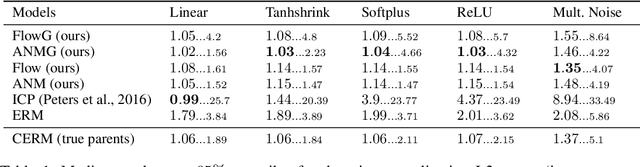
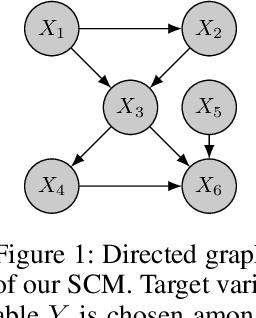
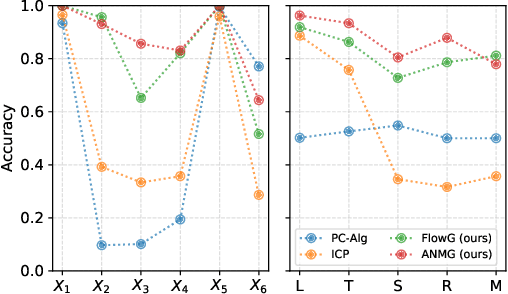
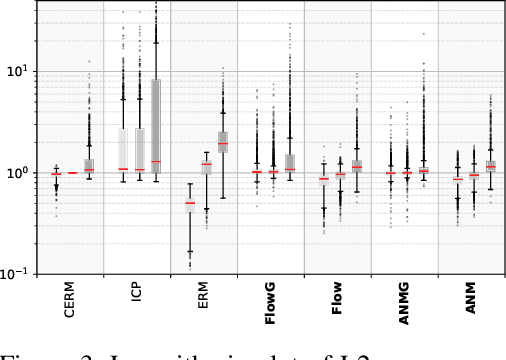
Standard supervised learning breaks down under data distribution shift. However, the principle of independent causal mechanisms (ICM, Peters et al. (2017)) can turn this weakness into an opportunity: one can take advantage of distribution shift between different environments during training in order to obtain more robust models. We propose a new gradient-based learning framework whose objective function is derived from the ICM principle. We show theoretically and experimentally that neural networks trained in this framework focus on relations remaining invariant across environments and ignore unstable ones. Moreover, we prove that the recovered stable relations correspond to the true causal mechanisms under certain conditions. In both regression and classification, the resulting models generalize well to unseen scenarios where traditionally trained models fail.