 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Harsh Truth: Segment-Level Analysis of Harsh Driving Events in Milan Using Large-Scale Telematics, Street Networks, and Google Street View
May 29, 2026Police-reported crash statistics remain the standard input for urban road-safety assessment, but their incompleteness and reporting lag limit their usefulness for timely, fine-grained intervention design. Harsh acceleration and braking events are widely used as surrogate safety indicators, but have so far been studied only in comparatively small urban samples. This study analyses harsh events across the urban road network of Milan, combining high-resolution telematics from more than 4.2 million vehicles equipped with On-Board Units, segment-level traffic metrics from TomTom, street-network and infrastructure attributes from OpenStreetMap, and visual streetscape features extracted from Google Street View via semantic segmentation using a OneFormer model. We employ an analytical framework combining non-parametric Mann--Whitney U tests of segment-feature distributions between high- and low-harshness groups with supervised machine-learning regressors. We find that, once exposure is controlled for, wider carriageways, crossings and transit stops, and more open visual fields (higher sky- and road-pixel proportions) are associated with higher harsh-event intensity, while denser built frontage is associated with lower intensity. Finally, the cycling-infrastructure case study identifies a gradient in harsh-event intensity across facility types: markings-only cycle lanes are associated with a 19.5% higher harshness score, and mixed-traffic configurations with an 11.5% higher score, relative to physically separated cycle paths, conditional on the included controls. These results support context-specific rather than uniform urban-safety interventions and illustrate how large-scale telematics combined with open geospatial and visual data can inform Vision Zero decision-making at the metropolitan scale.
Safe Motion Planning and Control Using Predictive and Adaptive Barrier Methods for Autonomous Surface Vessels
Oct 01, 2025Safe motion planning is essential for autonomous vessel operations, especially in challenging spaces such as narrow inland waterways. However, conventional motion planning approaches are often computationally intensive or overly conservative. This paper proposes a safe motion planning strategy combining Model Predictive Control (MPC) and Control Barrier Functions (CBFs). We introduce a time-varying inflated ellipse obstacle representation, where the inflation radius is adjusted depending on the relative position and attitude between the vessel and the obstacle. The proposed adaptive inflation reduces the conservativeness of the controller compared to traditional fixed-ellipsoid obstacle formulations. The MPC solution provides an approximate motion plan, and high-order CBFs ensure the vessel's safety using the varying inflation radius. Simulation and real-world experiments demonstrate that the proposed strategy enables the fully-actuated autonomous robot vessel to navigate through narrow spaces in real time and resolve potential deadlocks, all while ensuring safety.
Deep Reinforcement Learning Based Tracking Control of an Autonomous Surface Vessel in Natural Waters
Feb 20, 2023Accurate control of autonomous marine robots still poses challenges due to the complex dynamics of the environment. In this paper, we propose a Deep Reinforcement Learning (DRL) approach to train a controller for autonomous surface vessel (ASV) trajectory tracking and compare its performance with an advanced nonlinear model predictive controller (NMPC) in real environments. Taking into account environmental disturbances (e.g., wind, waves, and currents), noisy measurements, and non-ideal actuators presented in the physical ASV, several effective reward functions for DRL tracking control policies are carefully designed. The control policies were trained in a simulation environment with diverse tracking trajectories and disturbances. The performance of the DRL controller has been verified and compared with the NMPC in both simulations with model-based environmental disturbances and in natural waters. Simulations show that the DRL controller has 53.33% lower tracking error than that of NMPC. Experimental results further show that, compared to NMPC, the DRL controller has 35.51% lower tracking error, indicating that DRL controllers offer better disturbance rejection in river environments than NMPC.
Urban Visual Intelligence: Studying Cities with AI and Street-level Imagery
Jan 02, 2023The visual dimension of cities has been a fundamental subject in urban studies, since the pioneering work of scholars such as Sitte, Lynch, Arnheim, and Jacobs. Several decades later, big data and artificial intelligence (AI) are revolutionizing how people move, sense, and interact with cities. This paper reviews the literature on the appearance and function of cities to illustrate how visual information has been used to understand them. A conceptual framework, Urban Visual Intelligence, is introduced to systematically elaborate on how new image data sources and AI techniques are reshaping the way researchers perceive and measure cities, enabling the study of the physical environment and its interactions with socioeconomic environments at various scales. The paper argues that these new approaches enable researchers to revisit the classic urban theories and themes, and potentially help cities create environments that are more in line with human behaviors and aspirations in the digital age.
Identifying Damage-Sensitive Spatial Vibration Characteristics of Bridges from Widespread Smartphone Data
Nov 02, 2022The knowledge gap in the expected and actual conditions of bridges has created worldwide deficits in infrastructure service and funding challenges. Despite rapid advances over the past four decades, sensing technology is still not a part of bridge inspection protocols. Every time a vehicle with a mobile device passes over a bridge, there is an opportunity to capture potentially important structural response information at a very low cost. Prior work has shown how bridge modal frequencies can be accurately determined with crowdsourced smartphone-vehicle trip (SVT) data in real-world settings. However, modal frequencies provide very limited insight on the structural health conditions of the bridge. Here, we present a novel method to extract spatial vibration characteristics of real bridges, namely, absolute mode shapes, from crowdsourced SVT data. These characteristics have a demonstrable sensitivity to structural damage and provide superior, yet complementary, indicators of bridge condition. Furthermore, they are useful in the development of accurate mathematical models of the structural system and help reconcile the differences between models and real systems. We demonstrate successful applications on four very different bridges, with span lengths ranging from about 30 to 1300 meters, collectively representing about one quarter of bridges in the US. Supplementary work applies this computational approach to accurately detect simulated bridge damage entirely from crowdsourced SVT data in an unprecedentedly timely fashion. The results presented in this article open the way towards large-scale crowdsourced monitoring of bridge infrastructure.
Survey of Deep Learning for Autonomous Surface Vehicles in the Marine Environment
Oct 16, 2022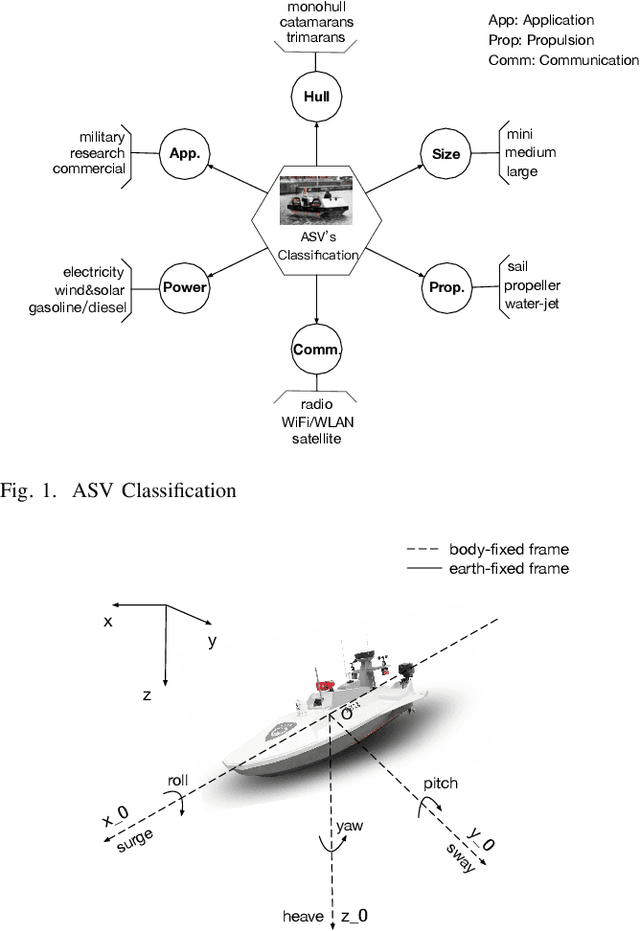
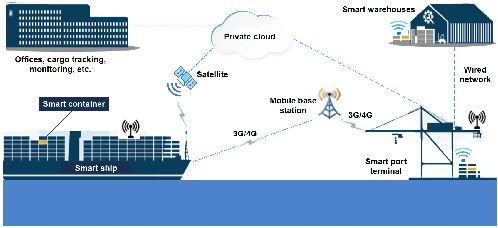
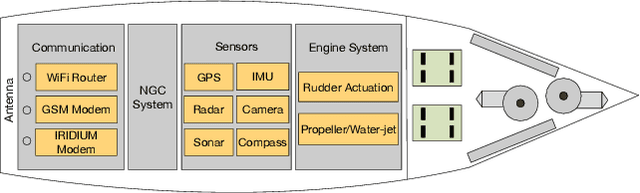
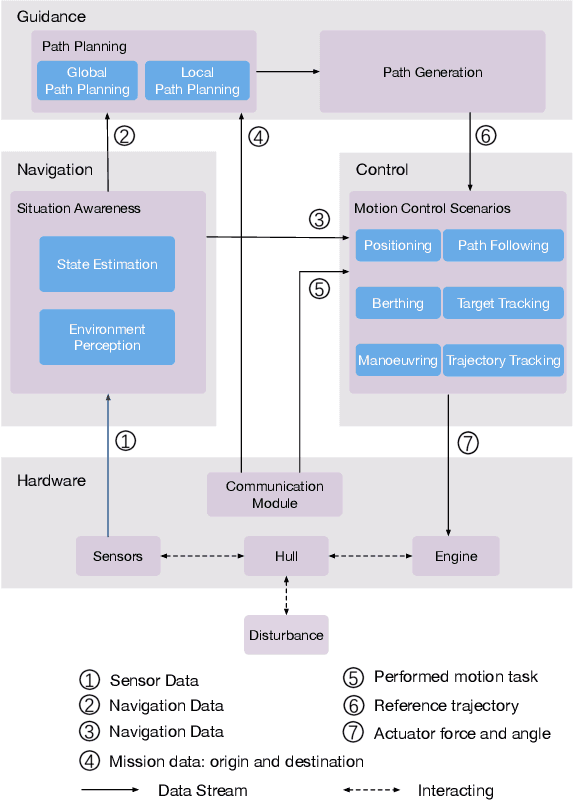
Within the next several years, there will be a high level of autonomous technology that will be available for widespread use, which will reduce labor costs, increase safety, save energy, enable difficult unmanned tasks in harsh environments, and eliminate human error. Compared to software development for other autonomous vehicles, maritime software development, especially on aging but still functional fleets, is described as being in a very early and emerging phase. This introduces very large challenges and opportunities for researchers and engineers to develop maritime autonomous systems. Recent progress in sensor and communication technology has introduced the use of autonomous surface vehicles (ASVs) in applications such as coastline surveillance, oceanographic observation, multi-vehicle cooperation, and search and rescue missions. Advanced artificial intelligence technology, especially deep learning (DL) methods that conduct nonlinear mapping with self-learning representations, has brought the concept of full autonomy one step closer to reality. This paper surveys the existing work regarding the implementation of DL methods in ASV-related fields. First, the scope of this work is described after reviewing surveys on ASV developments and technologies, which draws attention to the research gap between DL and maritime operations. Then, DL-based navigation, guidance, control (NGC) systems and cooperative operations, are presented. Finally, this survey is completed by highlighting the current challenges and future research directions.
Favelas 4D: Scalable methods for morphology analysis of informal settlements using terrestrial laser scanning data
Apr 23, 2021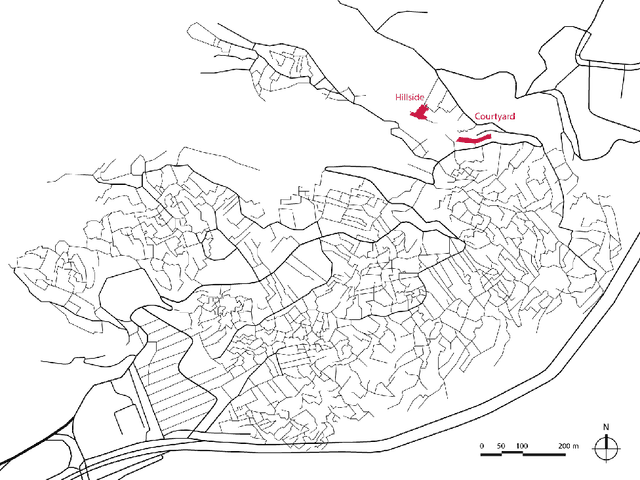
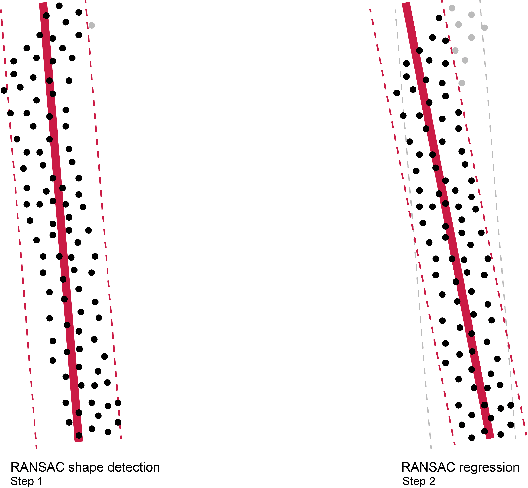
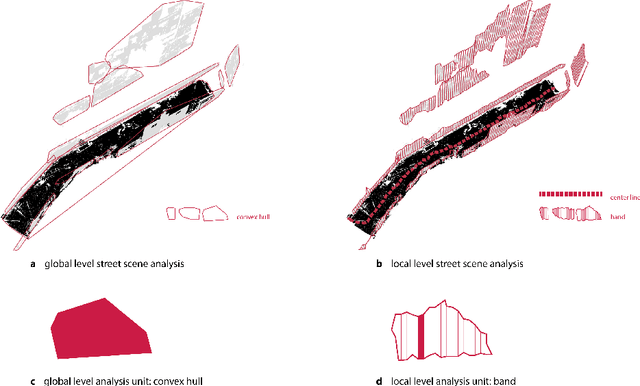
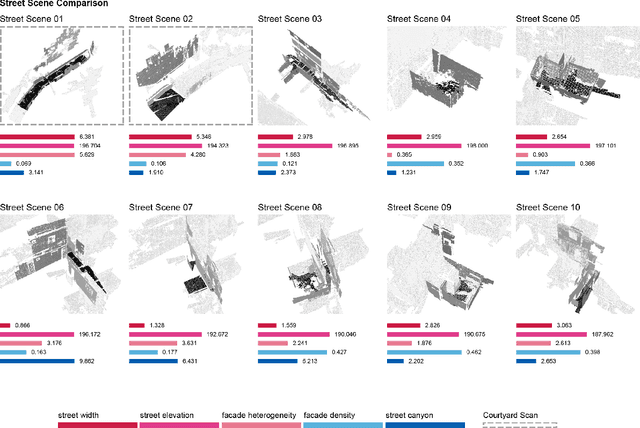
One billion people live in informal settlements worldwide. The complex and multilayered spaces that characterize this unplanned form of urbanization pose a challenge to traditional approaches to mapping and morphological analysis. This study proposes a methodology to study the morphological properties of informal settlements based on terrestrial LiDAR (Light Detection and Ranging) data collected in Rocinha, the largest favela in Rio de Janeiro, Brazil. Our analysis operates at two resolutions, including a \emph{global} analysis focused on comparing different streets of the favela to one another, and a \emph{local} analysis unpacking the variation of morphological metrics within streets. We show that our methodology reveals meaningful differences and commonalities both in terms of the global morphological characteristics across streets and their local distributions. Finally, we create morphological maps at high spatial resolution from LiDAR data, which can inform urban planning assessments of concerns related to crowding, structural safety, air quality, and accessibility in the favela. The methods for this study are automated and can be easily scaled to analyze entire informal settlements, leveraging the increasing availability of inexpensive LiDAR scanners on portable devices such as cellphones.
LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
Apr 22, 2021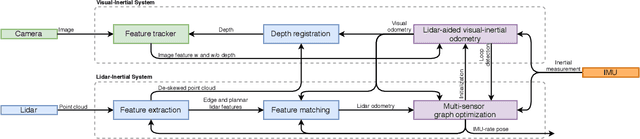
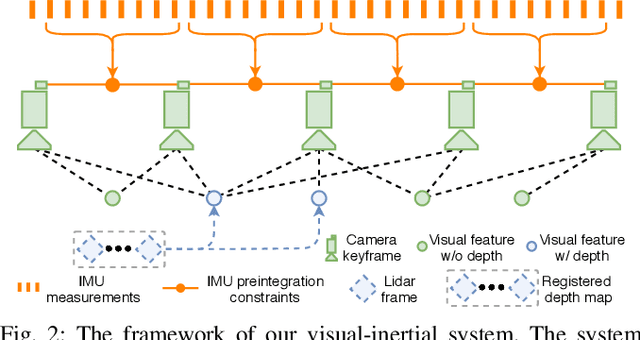
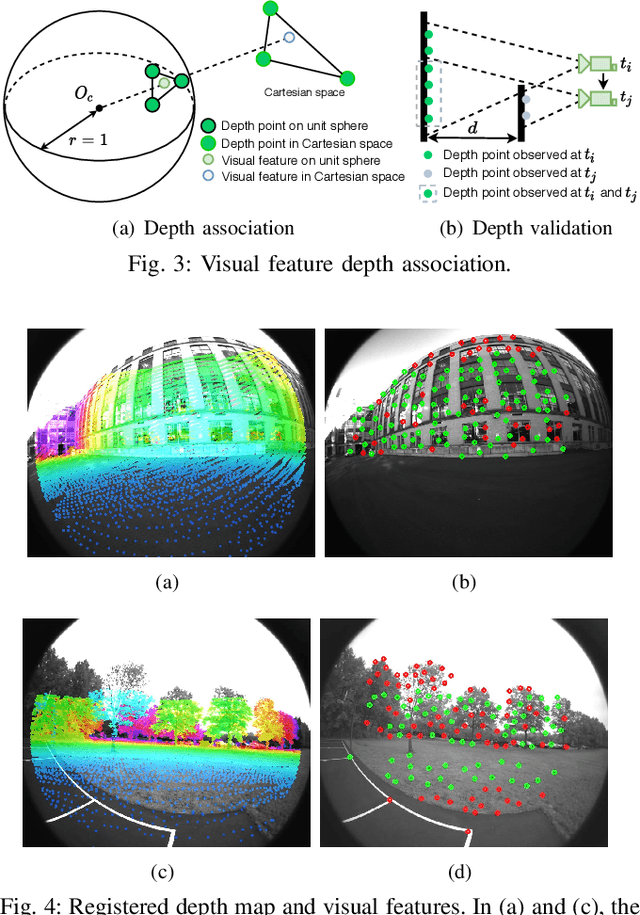
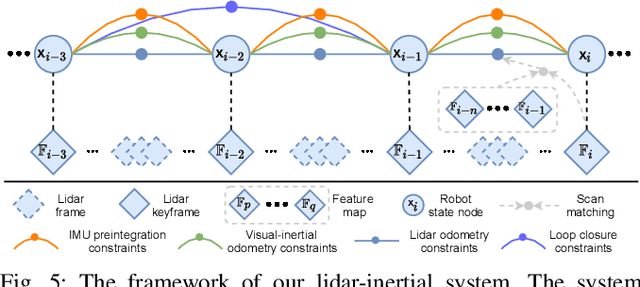
We propose a framework for tightly-coupled lidar-visual-inertial odometry via smoothing and mapping, LVI-SAM, that achieves real-time state estimation and map-building with high accuracy and robustness. LVI-SAM is built atop a factor graph and is composed of two sub-systems: a visual-inertial system (VIS) and a lidar-inertial system (LIS). The two sub-systems are designed in a tightly-coupled manner, in which the VIS leverages LIS estimation to facilitate initialization. The accuracy of the VIS is improved by extracting depth information for visual features using lidar measurements. In turn, the LIS utilizes VIS estimation for initial guesses to support scan-matching. Loop closures are first identified by the VIS and further refined by the LIS. LVI-SAM can also function when one of the two sub-systems fails, which increases its robustness in both texture-less and feature-less environments. LVI-SAM is extensively evaluated on datasets gathered from several platforms over a variety of scales and environments. Our implementation is available at https://git.io/lvi-sam
Robust Place Recognition using an Imaging Lidar
Mar 03, 2021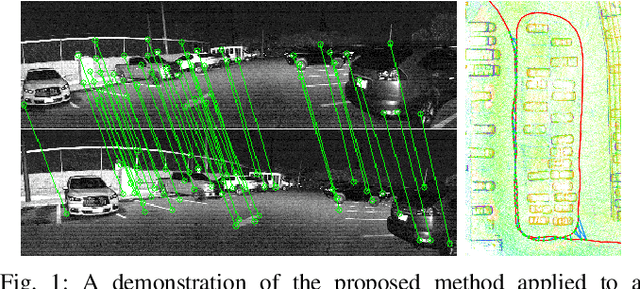
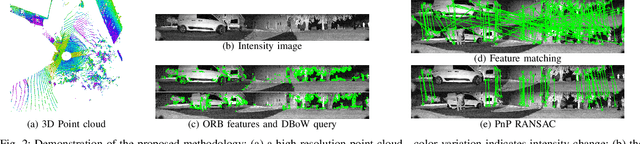
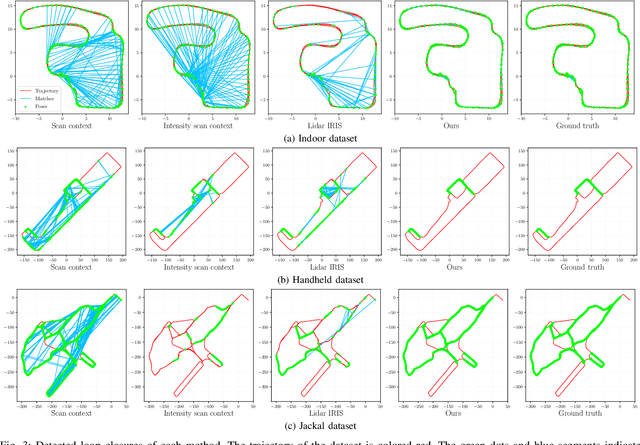
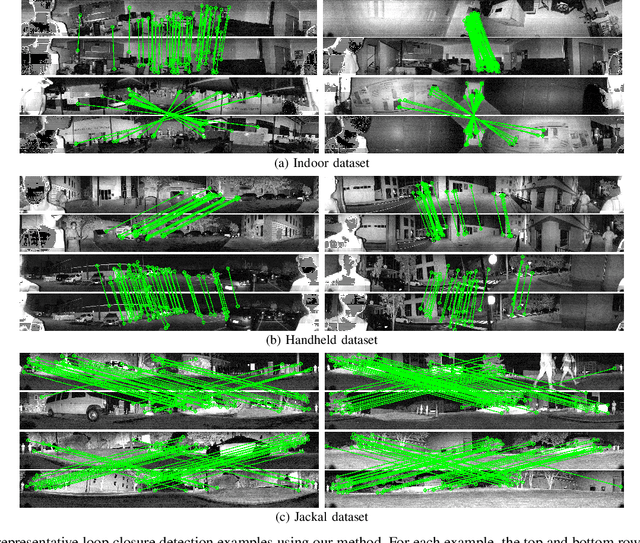
We propose a methodology for robust, real-time place recognition using an imaging lidar, which yields image-quality high-resolution 3D point clouds. Utilizing the intensity readings of an imaging lidar, we project the point cloud and obtain an intensity image. ORB feature descriptors are extracted from the image and encoded into a bag-of-words vector. The vector, used to identify the point cloud, is inserted into a database that is maintained by DBoW for fast place recognition queries. The returned candidate is further validated by matching visual feature descriptors. To reject matching outliers, we apply PnP, which minimizes the reprojection error of visual features' positions in Euclidean space with their correspondences in 2D image space, using RANSAC. Combining the advantages from both camera and lidar-based place recognition approaches, our method is truly rotation-invariant and can tackle reverse revisiting and upside-down revisiting. The proposed method is evaluated on datasets gathered from a variety of platforms over different scales and environments. Our implementation is available at https://git.io/imaging-lidar-place-recognition
ConiVAT: Cluster Tendency Assessment and Clustering with Partial Background Knowledge
Sep 28, 2020
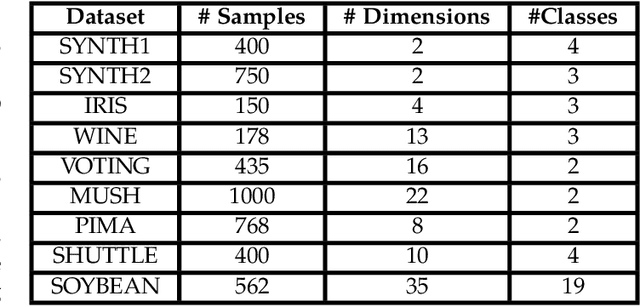

The VAT method is a visual technique for determining the potential cluster structure and the possible number of clusters in numerical data. Its improved version, iVAT, uses a path-based distance transform to improve the effectiveness of VAT for "tough" cases. Both VAT and iVAT have also been used in conjunction with a single-linkage(SL) hierarchical clustering algorithm. However, they are sensitive to noise and bridge points between clusters in the dataset, and consequently, the corresponding VAT/iVAT images are often in-conclusive for such cases. In this paper, we propose a constraint-based version of iVAT, which we call ConiVAT, that makes use of background knowledge in the form of constraints, to improve VAT/iVAT for challenging and complex datasets. ConiVAT uses the input constraints to learn the underlying similarity metric and builds a minimum transitive dissimilarity matrix, before applying VAT to it. We demonstrate ConiVAT approach to visual assessment and single linkage clustering on nine datasets to show that, it improves the quality of iVAT images for complex datasets, and it also overcomes the limitation of SL clustering with VAT/iVAT due to "noisy" bridges between clusters. Extensive experiment results on nine datasets suggest that ConiVAT outperforms the other three semi-supervised clustering algorithms in terms of improved clustering accuracy.