 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Motion Planning and Control Using Predictive and Adaptive Barrier Methods for Autonomous Surface Vessels
Oct 01, 2025Safe motion planning is essential for autonomous vessel operations, especially in challenging spaces such as narrow inland waterways. However, conventional motion planning approaches are often computationally intensive or overly conservative. This paper proposes a safe motion planning strategy combining Model Predictive Control (MPC) and Control Barrier Functions (CBFs). We introduce a time-varying inflated ellipse obstacle representation, where the inflation radius is adjusted depending on the relative position and attitude between the vessel and the obstacle. The proposed adaptive inflation reduces the conservativeness of the controller compared to traditional fixed-ellipsoid obstacle formulations. The MPC solution provides an approximate motion plan, and high-order CBFs ensure the vessel's safety using the varying inflation radius. Simulation and real-world experiments demonstrate that the proposed strategy enables the fully-actuated autonomous robot vessel to navigate through narrow spaces in real time and resolve potential deadlocks, all while ensuring safety.
IMPACT: A Toolchain for Nonlinear Model Predictive Control Specification, Prototyping, and Deployment
Mar 15, 2023



We present IMPACT, a flexible toolchain for nonlinear model predictive control (NMPC) specification with automatic code generation capabilities. The toolchain reduces the engineering complexity of NMPC implementations by providing the user with an easy-to-use application programming interface, and with the flexibility of using multiple state-of-the-art tools and numerical optimization solvers for rapid prototyping of NMPC solutions. IMPACT is written in Python, users can call it from Python and MATLAB, and the generated NMPC solvers can be directly executed from C, Python, MATLAB and Simulink. An application example is presented involving problem specification and deployment on embedded hardware using Simulink, showing the effectiveness and applicability of IMPACT for NMPC-based solutions.
An optimal open-loop strategy for handling a flexible beam with a robot manipulator
Oct 02, 2022
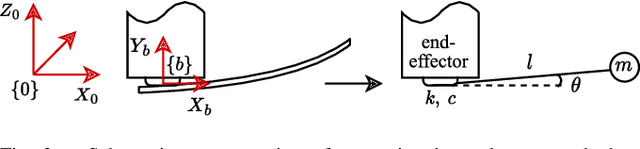
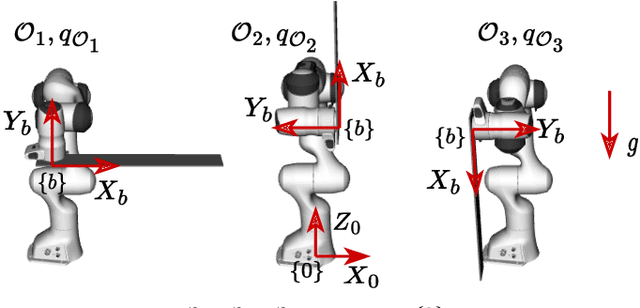
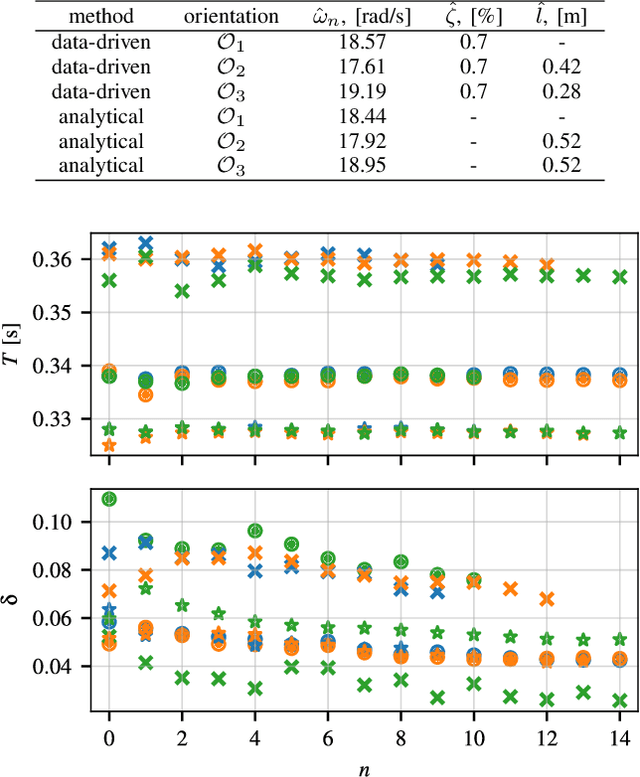
Fast and safe manipulation of flexible objects with a robot manipulator necessitates measures to cope with vibrations. Existing approaches either increase the task execution time or require complex models and/or additional instrumentation to measure vibrations. This paper develops a model-based method that overcomes these limitations. It relies on a simple pendulum-like model for modeling the beam, open-loop optimal control for suppressing vibrations, and does not require any exteroceptive sensors. We experimentally show that the proposed method drastically reduces residual vibrations -- at least 90% -- and outperforms the commonly used input shaping (IS) for the same execution time. Besides, our method can also execute the task faster than IS with a minor reduction in vibration suppression performance. The proposed method facilitates the development of new solutions to a wide range of tasks that involve dynamic manipulation of flexible objects.