 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Depth Priors for Neural Radiance Fields from Sparse Input Views
Dec 06, 2021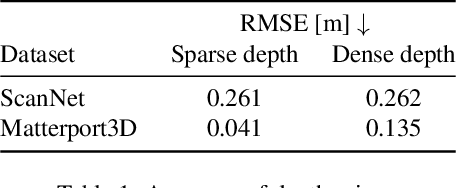
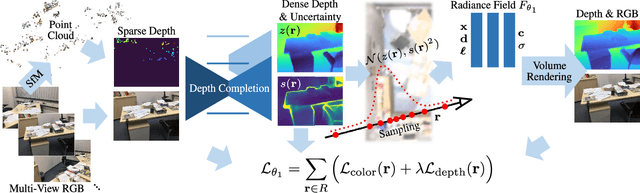
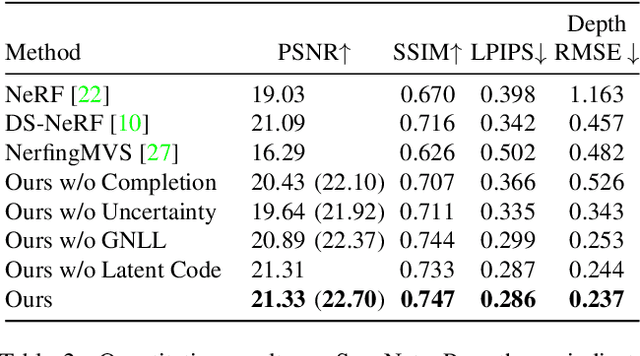

Neural radiance fields (NeRF) encode a scene into a neural representation that enables photo-realistic rendering of novel views. However, a successful reconstruction from RGB images requires a large number of input views taken under static conditions - typically up to a few hundred images for room-size scenes. Our method aims to synthesize novel views of whole rooms from an order of magnitude fewer images. To this end, we leverage dense depth priors in order to constrain the NeRF optimization. First, we take advantage of the sparse depth data that is freely available from the structure from motion (SfM) preprocessing step used to estimate camera poses. Second, we use depth completion to convert these sparse points into dense depth maps and uncertainty estimates, which are used to guide NeRF optimization. Our method enables data-efficient novel view synthesis on challenging indoor scenes, using as few as 18 images for an entire scene.
Zero-Shot Text-Guided Object Generation with Dream Fields
Dec 02, 2021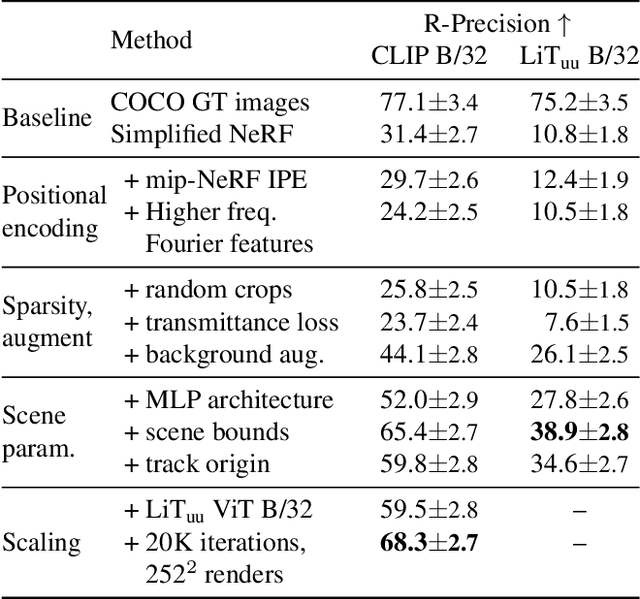
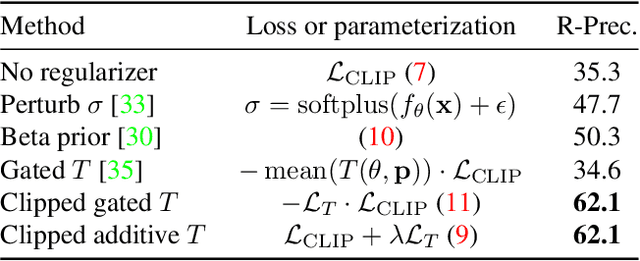
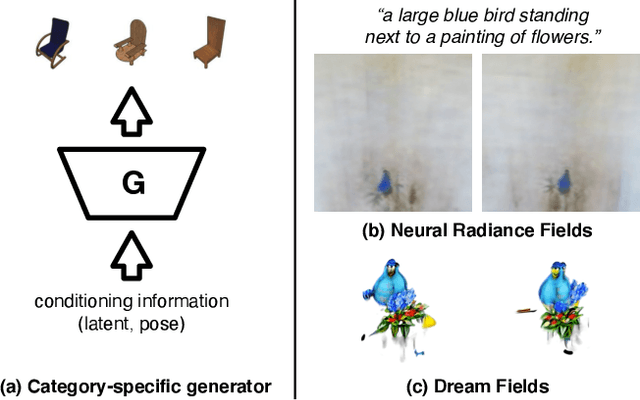
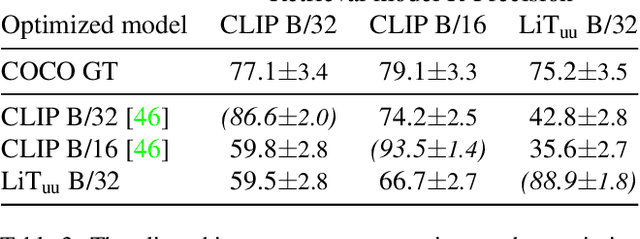
We combine neural rendering with multi-modal image and text representations to synthesize diverse 3D objects solely from natural language descriptions. Our method, Dream Fields, can generate the geometry and color of a wide range of objects without 3D supervision. Due to the scarcity of diverse, captioned 3D data, prior methods only generate objects from a handful of categories, such as ShapeNet. Instead, we guide generation with image-text models pre-trained on large datasets of captioned images from the web. Our method optimizes a Neural Radiance Field from many camera views so that rendered images score highly with a target caption according to a pre-trained CLIP model. To improve fidelity and visual quality, we introduce simple geometric priors, including sparsity-inducing transmittance regularization, scene bounds, and new MLP architectures. In experiments, Dream Fields produce realistic, multi-view consistent object geometry and color from a variety of natural language captions.
RegNeRF: Regularizing Neural Radiance Fields for View Synthesis from Sparse Inputs
Dec 01, 2021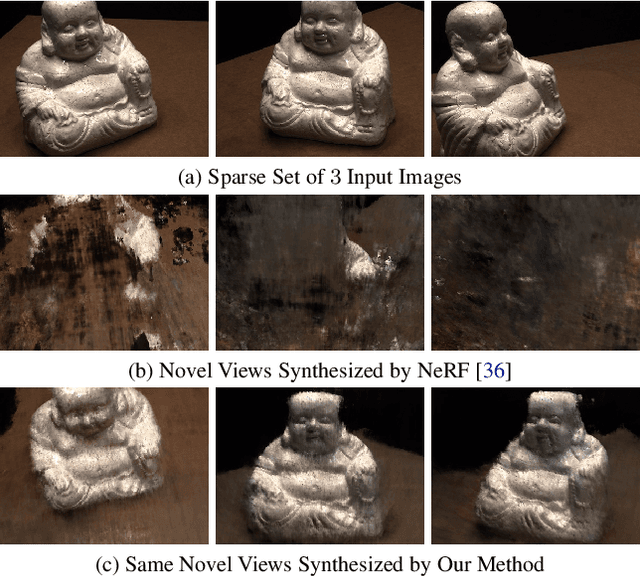
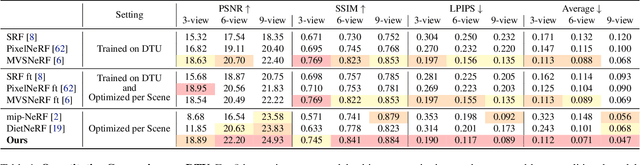
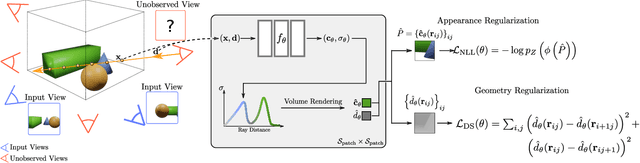
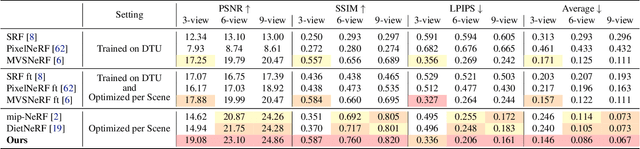
Neural Radiance Fields (NeRF) have emerged as a powerful representation for the task of novel view synthesis due to their simplicity and state-of-the-art performance. Though NeRF can produce photorealistic renderings of unseen viewpoints when many input views are available, its performance drops significantly when this number is reduced. We observe that the majority of artifacts in sparse input scenarios are caused by errors in the estimated scene geometry, and by divergent behavior at the start of training. We address this by regularizing the geometry and appearance of patches rendered from unobserved viewpoints, and annealing the ray sampling space during training. We additionally use a normalizing flow model to regularize the color of unobserved viewpoints. Our model outperforms not only other methods that optimize over a single scene, but in many cases also conditional models that are extensively pre-trained on large multi-view datasets.
NeRF in the Dark: High Dynamic Range View Synthesis from Noisy Raw Images
Nov 26, 2021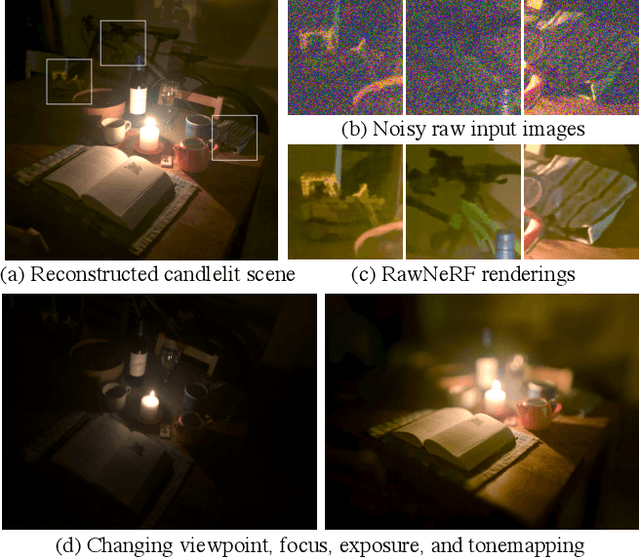
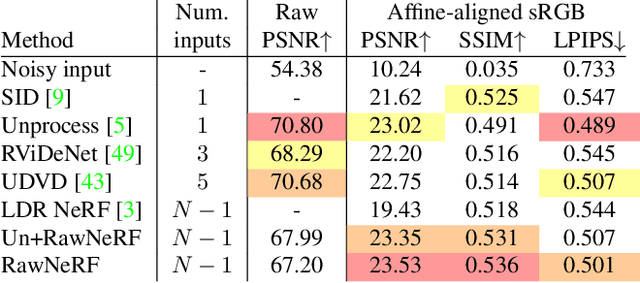
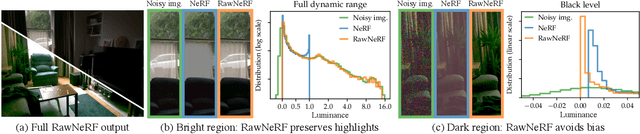
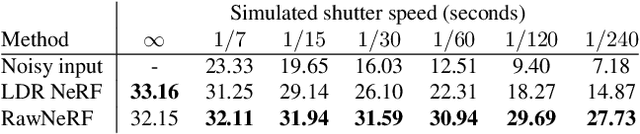
Neural Radiance Fields (NeRF) is a technique for high quality novel view synthesis from a collection of posed input images. Like most view synthesis methods, NeRF uses tonemapped low dynamic range (LDR) as input; these images have been processed by a lossy camera pipeline that smooths detail, clips highlights, and distorts the simple noise distribution of raw sensor data. We modify NeRF to instead train directly on linear raw images, preserving the scene's full dynamic range. By rendering raw output images from the resulting NeRF, we can perform novel high dynamic range (HDR) view synthesis tasks. In addition to changing the camera viewpoint, we can manipulate focus, exposure, and tonemapping after the fact. Although a single raw image appears significantly more noisy than a postprocessed one, we show that NeRF is highly robust to the zero-mean distribution of raw noise. When optimized over many noisy raw inputs (25-200), NeRF produces a scene representation so accurate that its rendered novel views outperform dedicated single and multi-image deep raw denoisers run on the same wide baseline input images. As a result, our method, which we call RawNeRF, can reconstruct scenes from extremely noisy images captured in near-darkness.
Mip-NeRF 360: Unbounded Anti-Aliased Neural Radiance Fields
Nov 24, 2021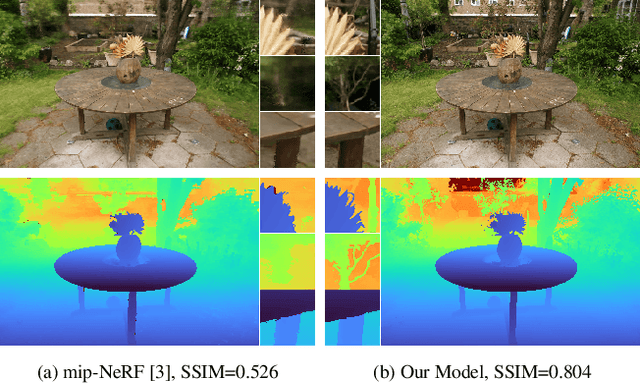
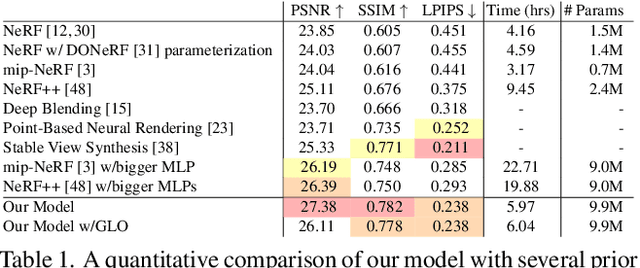
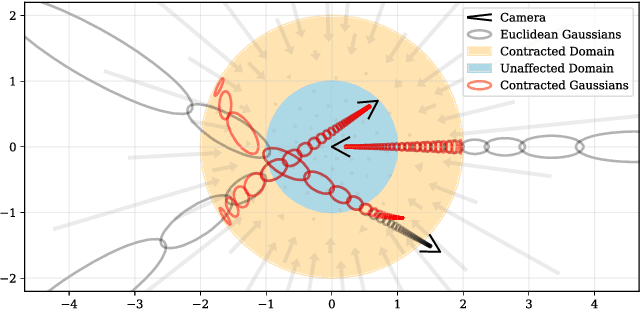
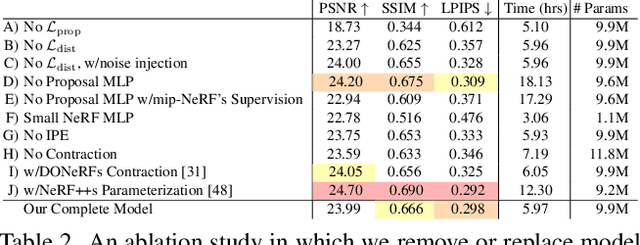
Though neural radiance fields (NeRF) have demonstrated impressive view synthesis results on objects and small bounded regions of space, they struggle on "unbounded" scenes, where the camera may point in any direction and content may exist at any distance. In this setting, existing NeRF-like models often produce blurry or low-resolution renderings (due to the unbalanced detail and scale of nearby and distant objects), are slow to train, and may exhibit artifacts due to the inherent ambiguity of the task of reconstructing a large scene from a small set of images. We present an extension of mip-NeRF (a NeRF variant that addresses sampling and aliasing) that uses a non-linear scene parameterization, online distillation, and a novel distortion-based regularizer to overcome the challenges presented by unbounded scenes. Our model, which we dub "mip-NeRF 360" as we target scenes in which the camera rotates 360 degrees around a point, reduces mean-squared error by 54% compared to mip-NeRF, and is able to produce realistic synthesized views and detailed depth maps for highly intricate, unbounded real-world scenes.
Advances in Neural Rendering
Nov 10, 2021Synthesizing photo-realistic images and videos is at the heart of computer graphics and has been the focus of decades of research. Traditionally, synthetic images of a scene are generated using rendering algorithms such as rasterization or ray tracing, which take specifically defined representations of geometry and material properties as input. Collectively, these inputs define the actual scene and what is rendered, and are referred to as the scene representation (where a scene consists of one or more objects). Example scene representations are triangle meshes with accompanied textures (e.g., created by an artist), point clouds (e.g., from a depth sensor), volumetric grids (e.g., from a CT scan), or implicit surface functions (e.g., truncated signed distance fields). The reconstruction of such a scene representation from observations using differentiable rendering losses is known as inverse graphics or inverse rendering. Neural rendering is closely related, and combines ideas from classical computer graphics and machine learning to create algorithms for synthesizing images from real-world observations. Neural rendering is a leap forward towards the goal of synthesizing photo-realistic image and video content. In recent years, we have seen immense progress in this field through hundreds of publications that show different ways to inject learnable components into the rendering pipeline. This state-of-the-art report on advances in neural rendering focuses on methods that combine classical rendering principles with learned 3D scene representations, often now referred to as neural scene representations. A key advantage of these methods is that they are 3D-consistent by design, enabling applications such as novel viewpoint synthesis of a captured scene. In addition to methods that handle static scenes, we cover neural scene representations for modeling non-rigidly deforming objects...
Baking Neural Radiance Fields for Real-Time View Synthesis
Mar 26, 2021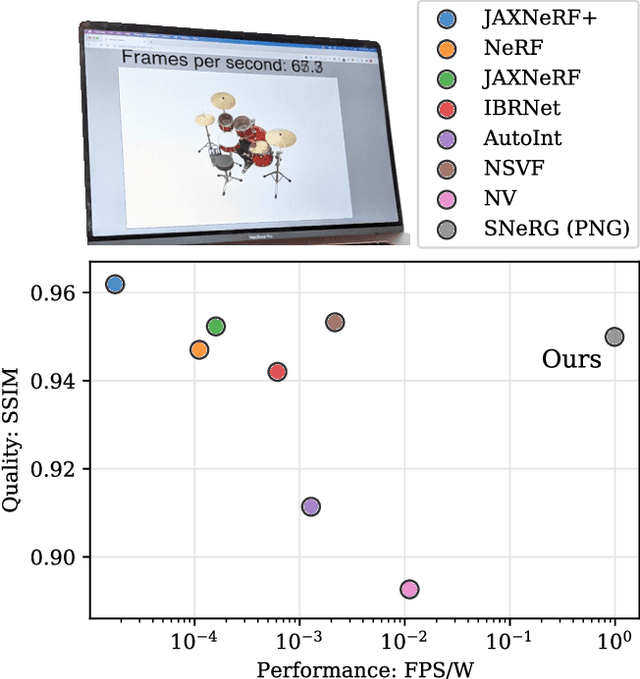
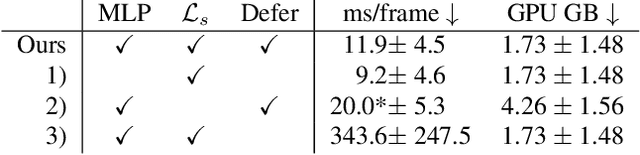
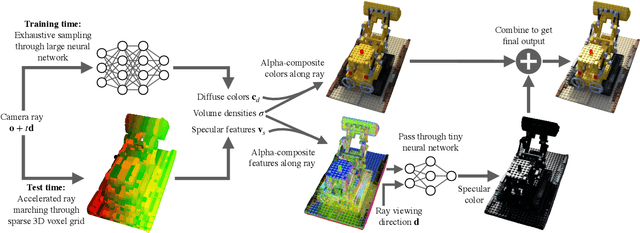
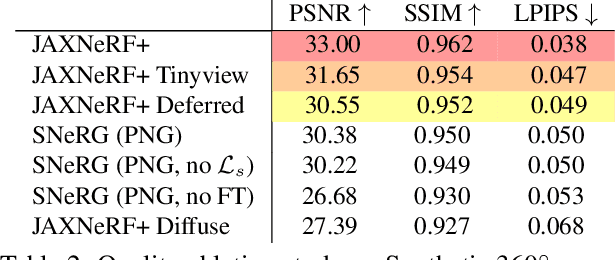
Neural volumetric representations such as Neural Radiance Fields (NeRF) have emerged as a compelling technique for learning to represent 3D scenes from images with the goal of rendering photorealistic images of the scene from unobserved viewpoints. However, NeRF's computational requirements are prohibitive for real-time applications: rendering views from a trained NeRF requires querying a multilayer perceptron (MLP) hundreds of times per ray. We present a method to train a NeRF, then precompute and store (i.e. "bake") it as a novel representation called a Sparse Neural Radiance Grid (SNeRG) that enables real-time rendering on commodity hardware. To achieve this, we introduce 1) a reformulation of NeRF's architecture, and 2) a sparse voxel grid representation with learned feature vectors. The resulting scene representation retains NeRF's ability to render fine geometric details and view-dependent appearance, is compact (averaging less than 90 MB per scene), and can be rendered in real-time (higher than 30 frames per second on a laptop GPU). Actual screen captures are shown in our video.
Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Radiance Fields
Mar 24, 2021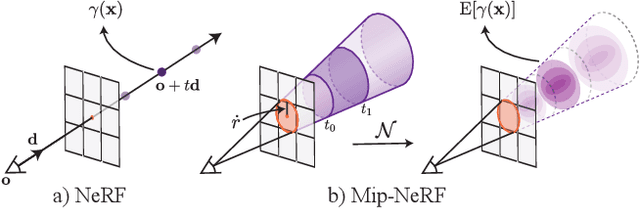

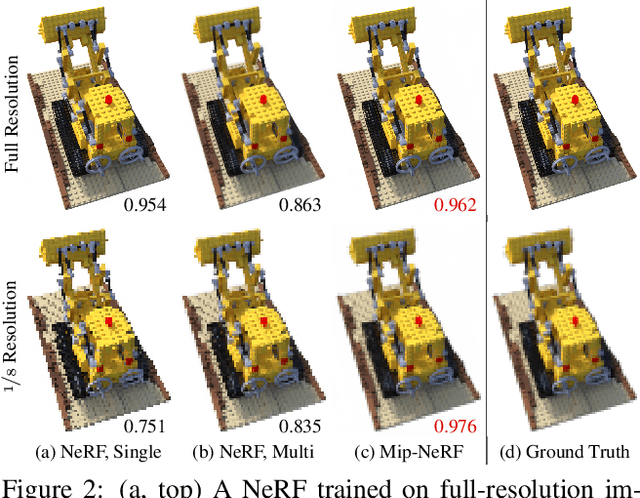
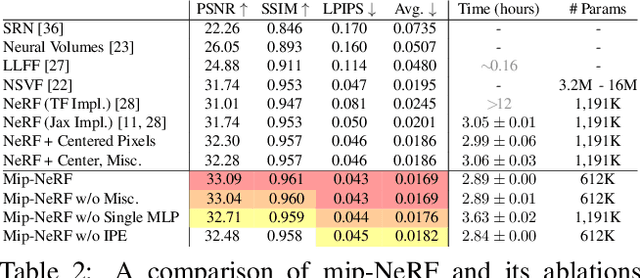
The rendering procedure used by neural radiance fields (NeRF) samples a scene with a single ray per pixel and may therefore produce renderings that are excessively blurred or aliased when training or testing images observe scene content at different resolutions. The straightforward solution of supersampling by rendering with multiple rays per pixel is impractical for NeRF, because rendering each ray requires querying a multilayer perceptron hundreds of times. Our solution, which we call "mip-NeRF" (a la "mipmap"), extends NeRF to represent the scene at a continuously-valued scale. By efficiently rendering anti-aliased conical frustums instead of rays, mip-NeRF reduces objectionable aliasing artifacts and significantly improves NeRF's ability to represent fine details, while also being 7% faster than NeRF and half the size. Compared to NeRF, mip-NeRF reduces average error rates by 16% on the dataset presented with NeRF and by 60% on a challenging multiscale variant of that dataset that we present. Mip-NeRF is also able to match the accuracy of a brute-force supersampled NeRF on our multiscale dataset while being 22x faster.
NeRV: Neural Reflectance and Visibility Fields for Relighting and View Synthesis
Dec 07, 2020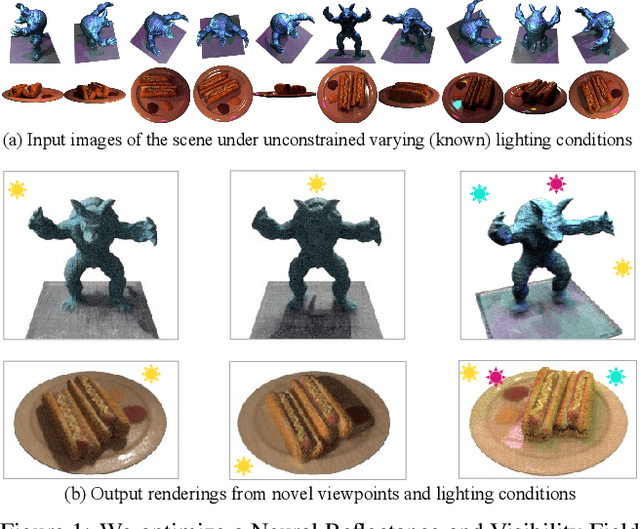
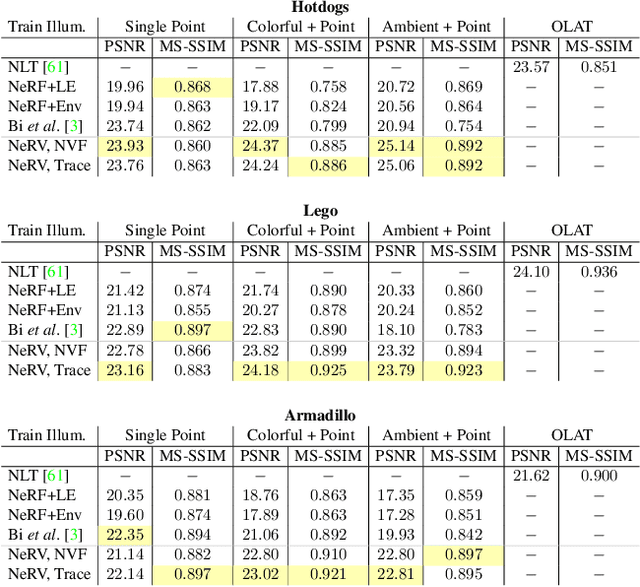
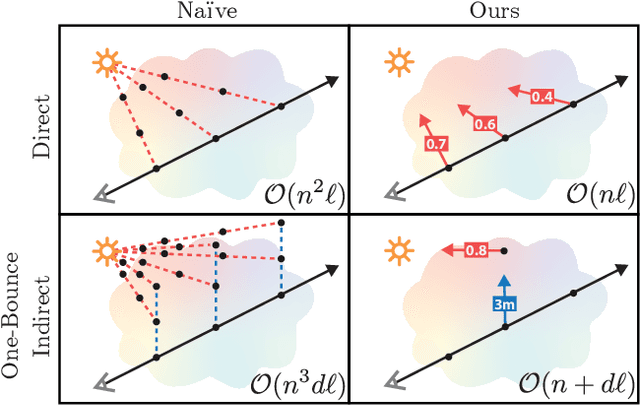
We present a method that takes as input a set of images of a scene illuminated by unconstrained known lighting, and produces as output a 3D representation that can be rendered from novel viewpoints under arbitrary lighting conditions. Our method represents the scene as a continuous volumetric function parameterized as MLPs whose inputs are a 3D location and whose outputs are the following scene properties at that input location: volume density, surface normal, material parameters, distance to the first surface intersection in any direction, and visibility of the external environment in any direction. Together, these allow us to render novel views of the object under arbitrary lighting, including indirect illumination effects. The predicted visibility and surface intersection fields are critical to our model's ability to simulate direct and indirect illumination during training, because the brute-force techniques used by prior work are intractable for lighting conditions outside of controlled setups with a single light. Our method outperforms alternative approaches for recovering relightable 3D scene representations, and performs well in complex lighting settings that have posed a significant challenge to prior work.
Learned Initializations for Optimizing Coordinate-Based Neural Representations
Dec 03, 2020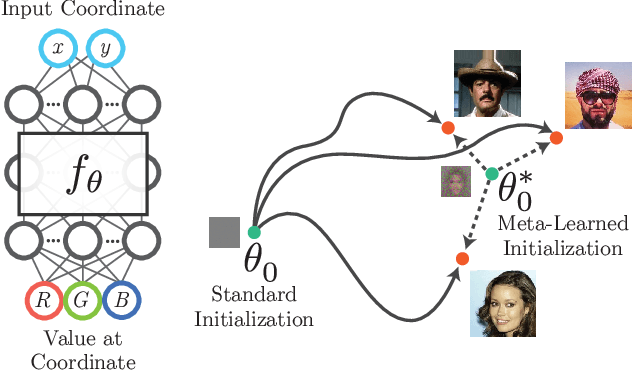
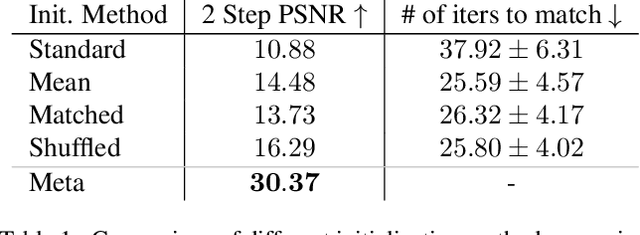
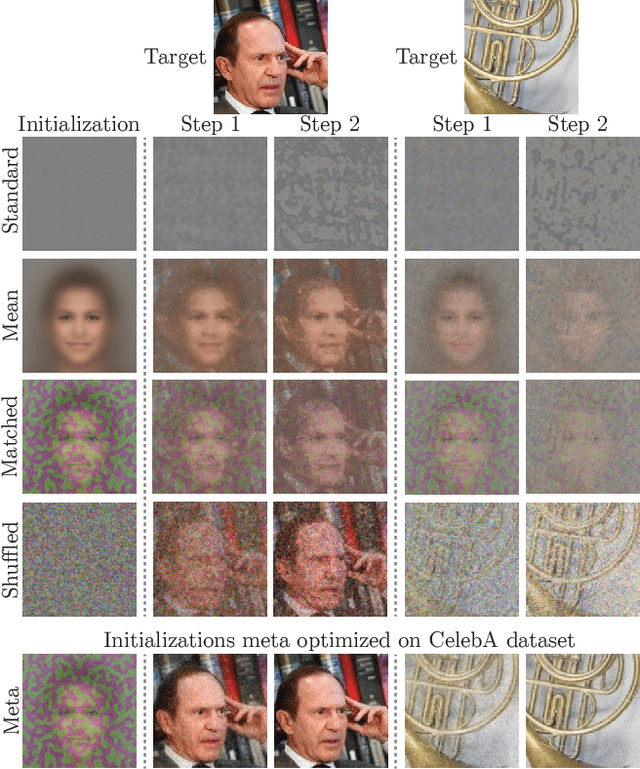
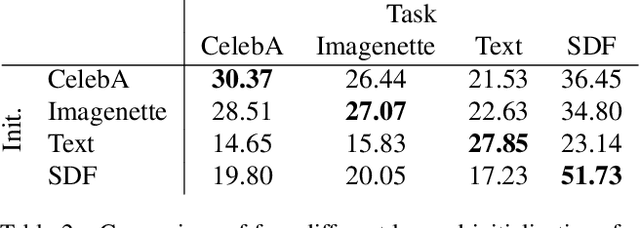
Coordinate-based neural representations have shown significant promise as an alternative to discrete, array-based representations for complex low dimensional signals. However, optimizing a coordinate-based network from randomly initialized weights for each new signal is inefficient. We propose applying standard meta-learning algorithms to learn the initial weight parameters for these fully-connected networks based on the underlying class of signals being represented (e.g., images of faces or 3D models of chairs). Despite requiring only a minor change in implementation, using these learned initial weights enables faster convergence during optimization and can serve as a strong prior over the signal class being modeled, resulting in better generalization when only partial observations of a given signal are available. We explore these benefits across a variety of tasks, including representing 2D images, reconstructing CT scans, and recovering 3D shapes and scenes from 2D image observations.