 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving 3D Object Detection through Progressive Population Based Augmentation
Apr 02, 2020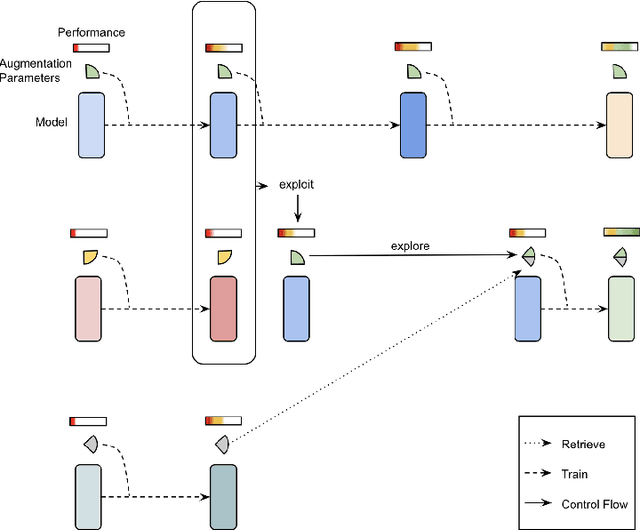
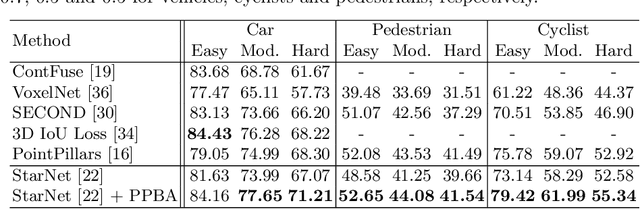
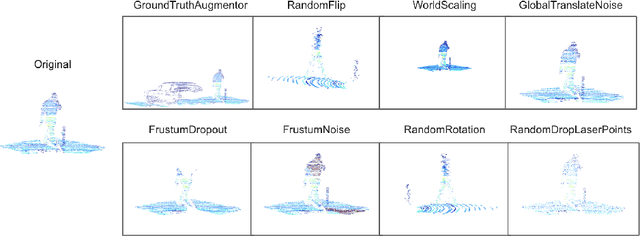
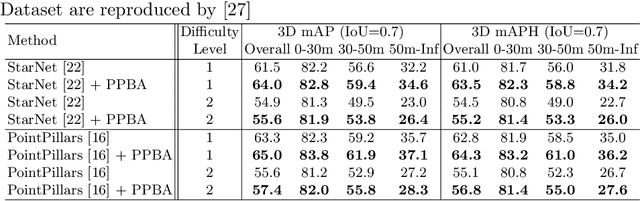
Data augmentation has been widely adopted for object detection in 3D point clouds. All previous efforts have focused on manually designing specific data augmentation methods for individual architectures, however no work has attempted to automate the design of data augmentation in 3D detection problems -- as is common in 2D image-based computer vision. In this work, we present the first attempt to automate the design of data augmentation policies for 3D object detection. We present an algorithm, termed Progressive Population Based Augmentation (PPBA). PPBA learns to optimize augmentation strategies by narrowing down the search space and adopting the best parameters discovered in previous iterations. On the KITTI test set, PPBA improves the StarNet detector by substantial margins on the moderate difficulty category of cars, pedestrians, and cyclists, outperforming all current state-of-the-art single-stage detection models. Additional experiments on the Waymo Open Dataset indicate that PPBA continues to effectively improve 3D object detection on a 20x larger dataset compared to KITTI. The magnitude of the improvements may be comparable to advances in 3D perception architectures and the gains come without an incurred cost at inference time. In subsequent experiments, we find that PPBA may be up to 10x more data efficient than baseline 3D detection models without augmentation, highlighting that 3D detection models may achieve competitive accuracy with far fewer labeled examples.
AugMix: A Simple Data Processing Method to Improve Robustness and Uncertainty
Dec 05, 2019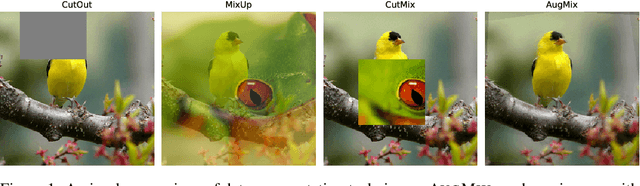
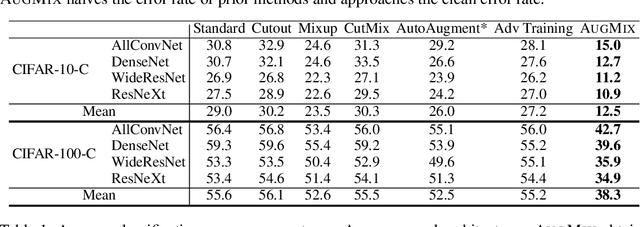
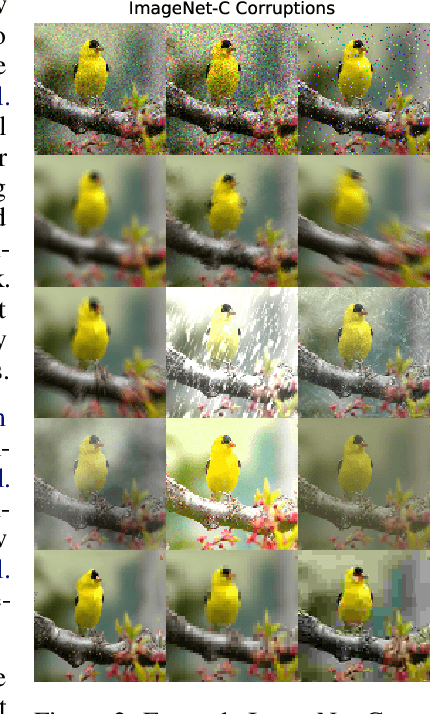

Modern deep neural networks can achieve high accuracy when the training distribution and test distribution are identically distributed, but this assumption is frequently violated in practice. When the train and test distributions are mismatched, accuracy can plummet. Currently there are few techniques that improve robustness to unforeseen data shifts encountered during deployment. In this work, we propose a technique to improve the robustness and uncertainty estimates of image classifiers. We propose AugMix, a data processing technique that is simple to implement, adds limited computational overhead, and helps models withstand unforeseen corruptions. AugMix significantly improves robustness and uncertainty measures on challenging image classification benchmarks, closing the gap between previous methods and the best possible performance in some cases by more than half.
RandAugment: Practical automated data augmentation with a reduced search space
Nov 14, 2019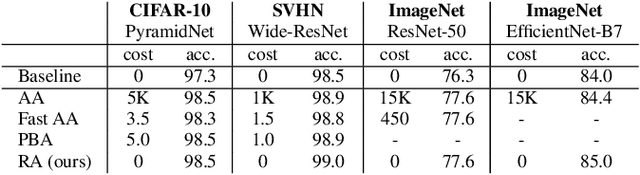
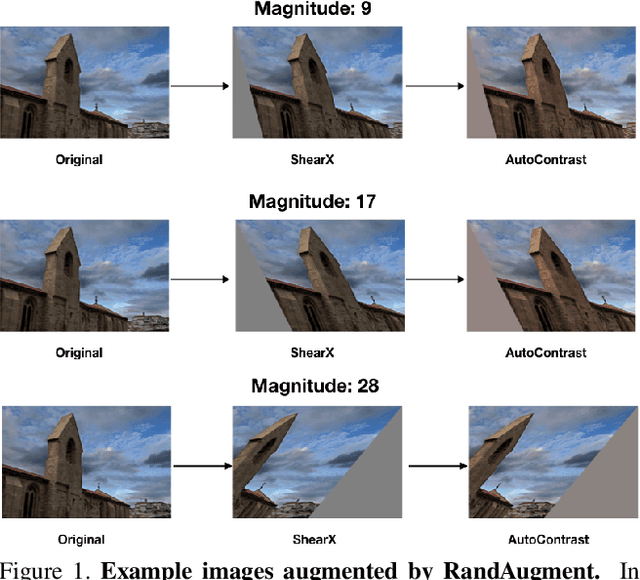
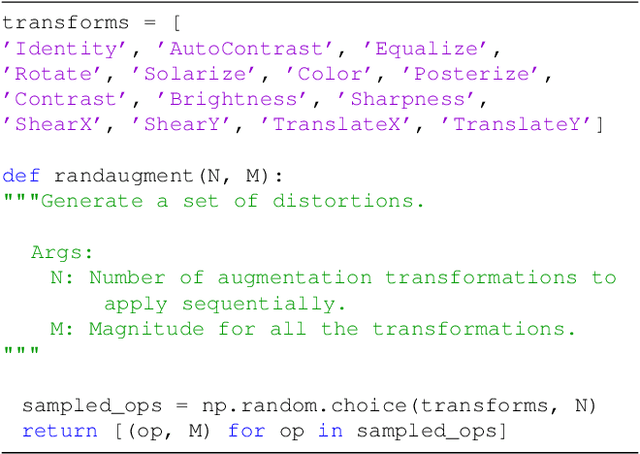
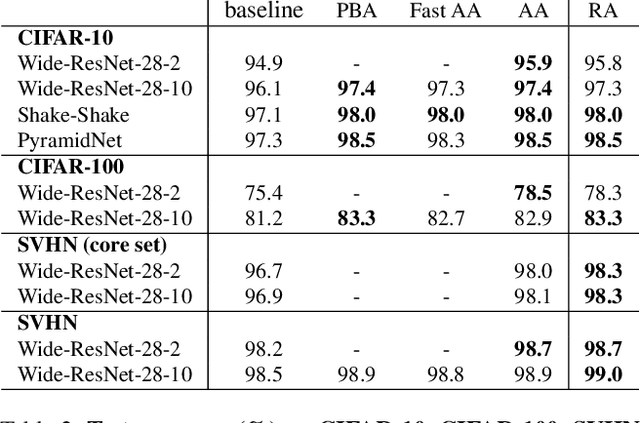
Recent work has shown that data augmentation has the potential to significantly improve the generalization of deep learning models. Recently, automated augmentation strategies have led to state-of-the-art results in image classification and object detection. While these strategies were optimized for improving validation accuracy, they also led to state-of-the-art results in semi-supervised learning and improved robustness to common corruptions of images. An obstacle to a large-scale adoption of these methods is a separate search phase which increases the training complexity and may substantially increase the computational cost. Additionally, due to the separate search phase, these approaches are unable to adjust the regularization strength based on model or dataset size. Automated augmentation policies are often found by training small models on small datasets and subsequently applied to train larger models. In this work, we remove both of these obstacles. RandAugment has a significantly reduced search space which allows it to be trained on the target task with no need for a separate proxy task. Furthermore, due to the parameterization, the regularization strength may be tailored to different model and dataset sizes. RandAugment can be used uniformly across different tasks and datasets and works out of the box, matching or surpassing all previous automated augmentation approaches on CIFAR-10/100, SVHN, and ImageNet. On the ImageNet dataset we achieve 85.0% accuracy, a 0.6% increase over the previous state-of-the-art and 1.0% increase over baseline augmentation. On object detection, RandAugment leads to 1.0-1.3% improvement over baseline augmentation, and is within 0.3% mAP of AutoAugment on COCO. Finally, due to its interpretable hyperparameter, RandAugment may be used to investigate the role of data augmentation with varying model and dataset size. Code is available online.
Learning Data Augmentation Strategies for Object Detection
Jun 26, 2019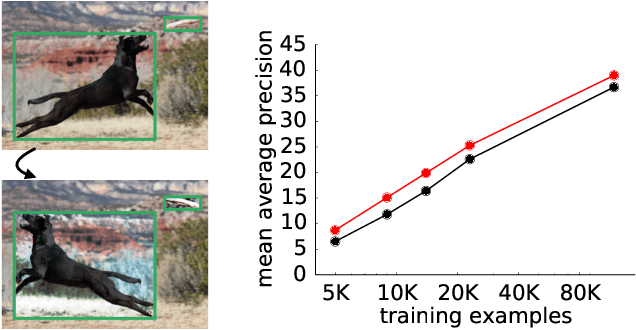
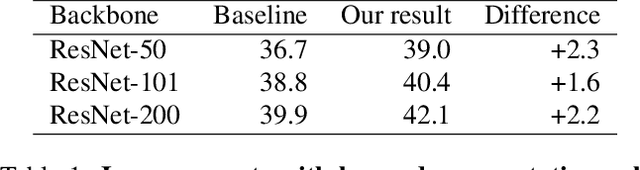
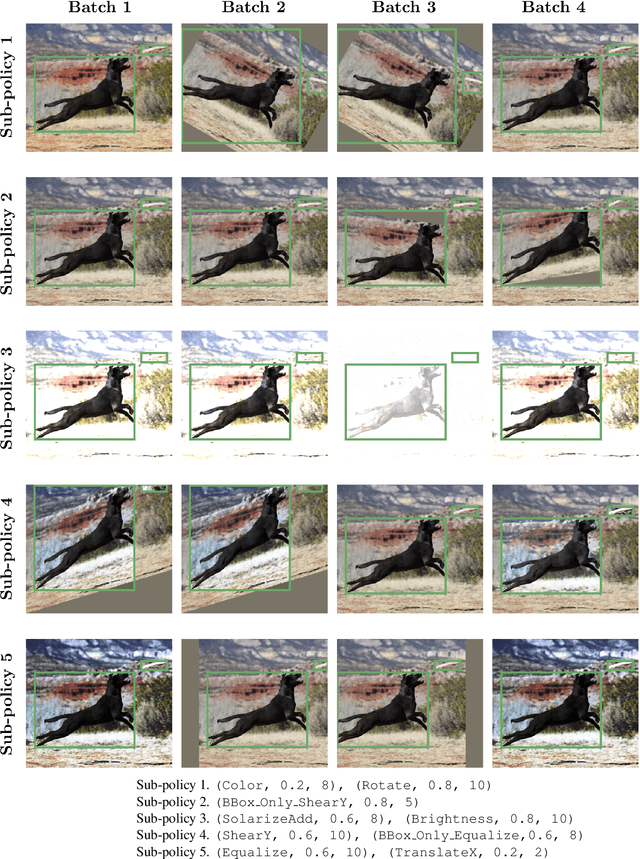
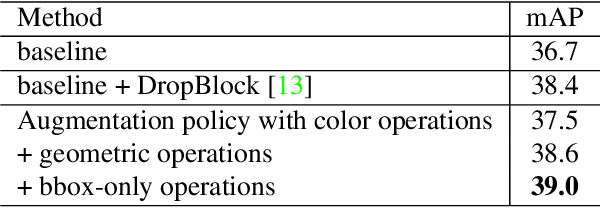
Data augmentation is a critical component of training deep learning models. Although data augmentation has been shown to significantly improve image classification, its potential has not been thoroughly investigated for object detection. Given the additional cost for annotating images for object detection, data augmentation may be of even greater importance for this computer vision task. In this work, we study the impact of data augmentation on object detection. We first demonstrate that data augmentation operations borrowed from image classification may be helpful for training detection models, but the improvement is limited. Thus, we investigate how learned, specialized data augmentation policies improve generalization performance for detection models. Importantly, these augmentation policies only affect training and leave a trained model unchanged during evaluation. Experiments on the COCO dataset indicate that an optimized data augmentation policy improves detection accuracy by more than +2.3 mAP, and allow a single inference model to achieve a state-of-the-art accuracy of 50.7 mAP. Importantly, the best policy found on COCO may be transferred unchanged to other detection datasets and models to improve predictive accuracy. For example, the best augmentation policy identified with COCO improves a strong baseline on PASCAL-VOC by +2.7 mAP. Our results also reveal that a learned augmentation policy is superior to state-of-the-art architecture regularization methods for object detection, even when considering strong baselines. Code for training with the learned policy is available online at https://github.com/tensorflow/tpu/tree/master/models/official/detection
Attention Augmented Convolutional Networks
Apr 22, 2019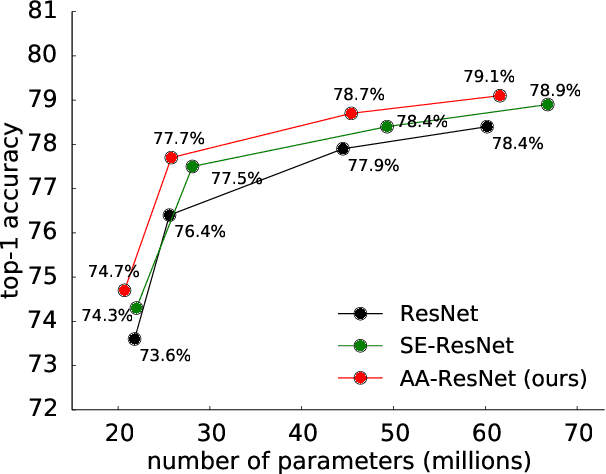
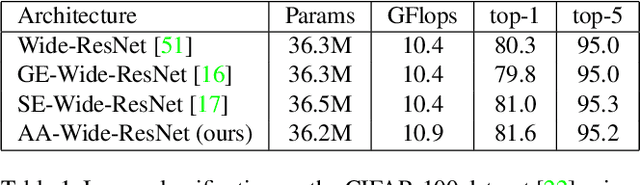
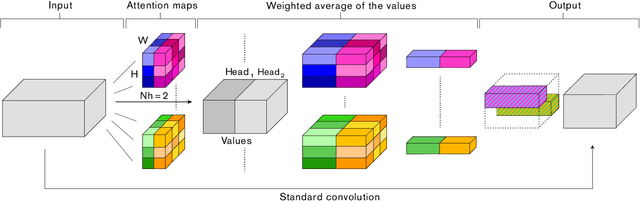
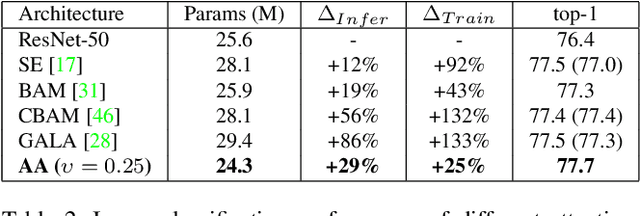
Convolutional networks have been the paradigm of choice in many computer vision applications. The convolution operation however has a significant weakness in that it only operates on a local neighborhood, thus missing global information. Self-attention, on the other hand, has emerged as a recent advance to capture long range interactions, but has mostly been applied to sequence modeling and generative modeling tasks. In this paper, we consider the use of self-attention for discriminative visual tasks as an alternative to convolutions. We introduce a novel two-dimensional relative self-attention mechanism that proves competitive in replacing convolutions as a stand-alone computational primitive for image classification. We find in control experiments that the best results are obtained when combining both convolutions and self-attention. We therefore propose to augment convolutional operators with this self-attention mechanism by concatenating convolutional feature maps with a set of feature maps produced via self-attention. Extensive experiments show that Attention Augmentation leads to consistent improvements in image classification on ImageNet and object detection on COCO across many different models and scales, including ResNets and a state-of-the art mobile constrained network, while keeping the number of parameters similar. In particular, our method achieves a $1.3\%$ top-1 accuracy improvement on ImageNet classification over a ResNet50 baseline and outperforms other attention mechanisms for images such as Squeeze-and-Excitation. It also achieves an improvement of 1.4 mAP in COCO Object Detection on top of a RetinaNet baseline.
SpecAugment: A Simple Data Augmentation Method for Automatic Speech Recognition
Apr 18, 2019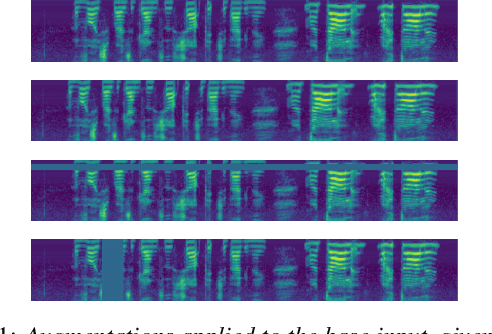
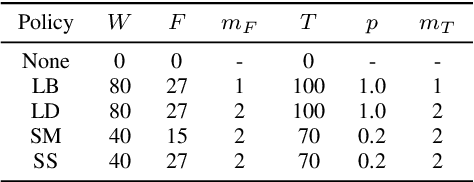
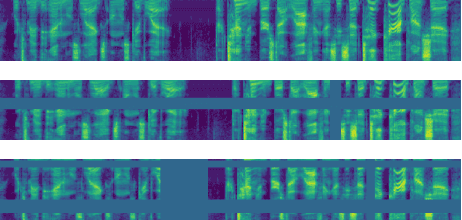
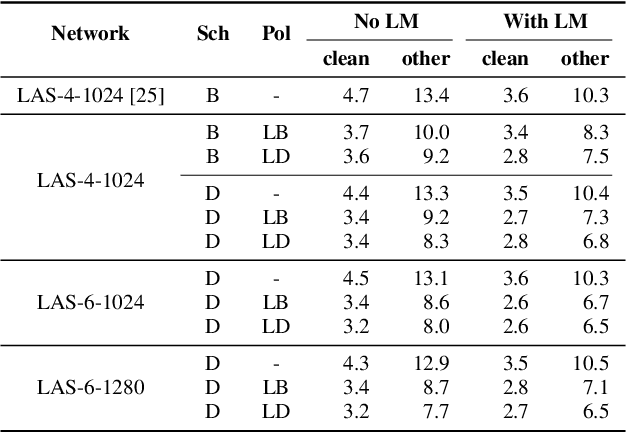
We present SpecAugment, a simple data augmentation method for speech recognition. SpecAugment is applied directly to the feature inputs of a neural network (i.e., filter bank coefficients). The augmentation policy consists of warping the features, masking blocks of frequency channels, and masking blocks of time steps. We apply SpecAugment on Listen, Attend and Spell networks for end-to-end speech recognition tasks. We achieve state-of-the-art performance on the LibriSpeech 960h and Swichboard 300h tasks, outperforming all prior work. On LibriSpeech, we achieve 6.8% WER on test-other without the use of a language model, and 5.8% WER with shallow fusion with a language model. This compares to the previous state-of-the-art hybrid system of 7.5% WER. For Switchboard, we achieve 7.2%/14.6% on the Switchboard/CallHome portion of the Hub5'00 test set without the use of a language model, and 6.8%/14.1% with shallow fusion, which compares to the previous state-of-the-art hybrid system at 8.3%/17.3% WER.
AutoAugment: Learning Augmentation Policies from Data
Oct 09, 2018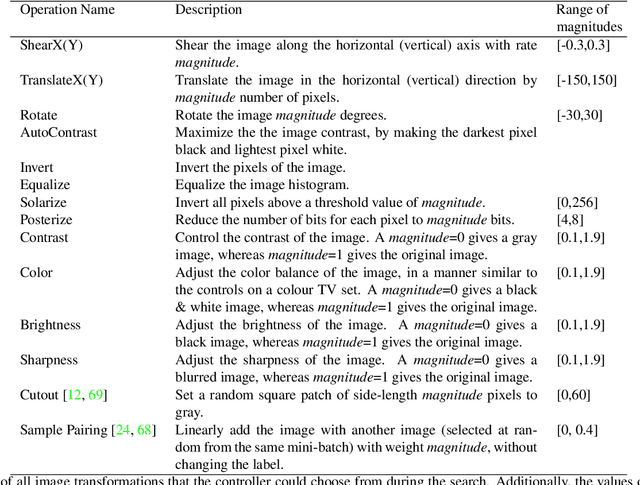
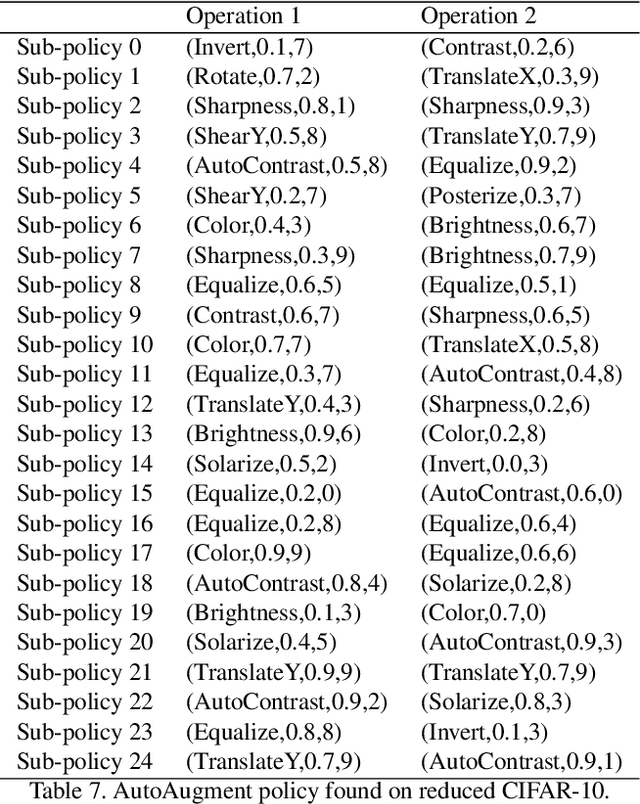
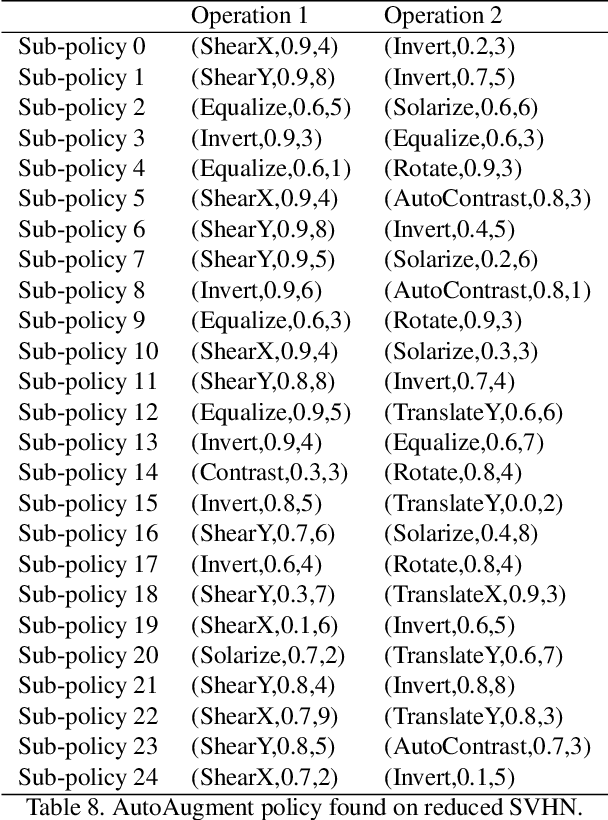
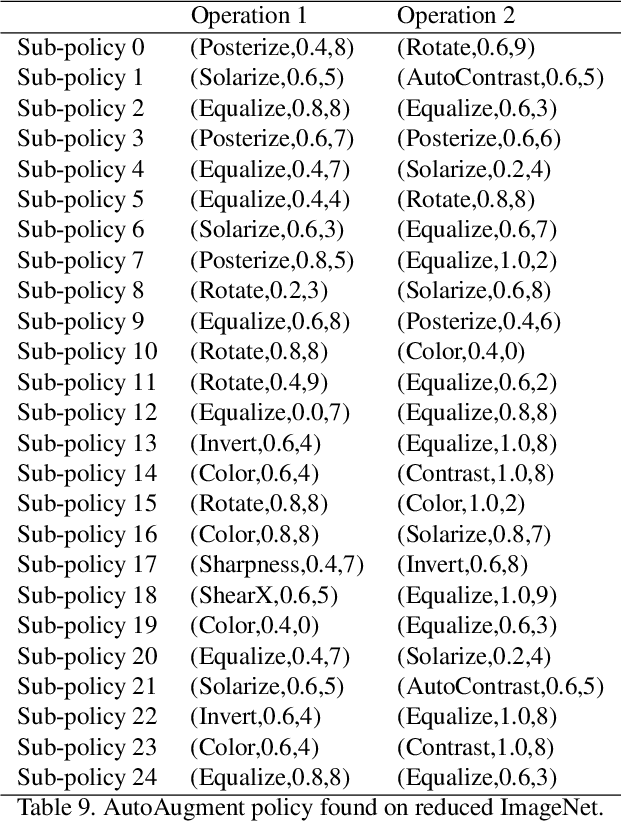
In this paper, we take a closer look at data augmentation for images, and describe a simple procedure called AutoAugment to search for improved data augmentation policies. Our key insight is to create a search space of data augmentation policies, evaluating the quality of a particular policy directly on the dataset of interest. In our implementation, we have designed a search space where a policy consists of many sub-policies, one of which is randomly chosen for each image in each mini-batch. A sub-policy consists of two operations, each operation being an image processing function such as translation, rotation, or shearing, and the probabilities and magnitudes with which the functions are applied. We use a search algorithm to find the best policy such that the neural network yields the highest validation accuracy on a target dataset. Our method achieves state-of-the-art accuracy on CIFAR-10, CIFAR-100, SVHN, and ImageNet (without additional data). On ImageNet, we attain a Top-1 accuracy of 83.54%. On CIFAR-10, we achieve an error rate of 1.48%, which is 0.65% better than the previous state-of-the-art. Finally, policies learned from one dataset can be transferred to work well on other similar datasets. For example, the policy learned on ImageNet allows us to achieve state-of-the-art accuracy on the fine grained visual classification dataset Stanford Cars, without fine-tuning weights pre-trained on additional data. Code to train Wide-ResNet, Shake-Shake and ShakeDrop models with AutoAugment policies can be found at https://github.com/tensorflow/models/tree/master/research/autoaugment
Searching for Efficient Multi-Scale Architectures for Dense Image Prediction
Sep 11, 2018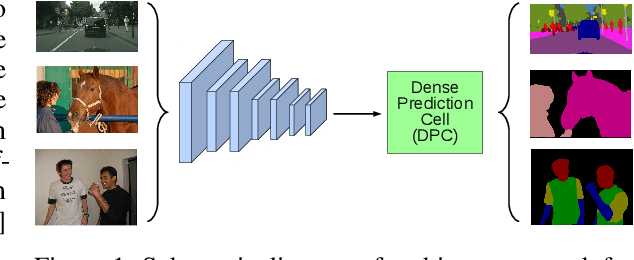
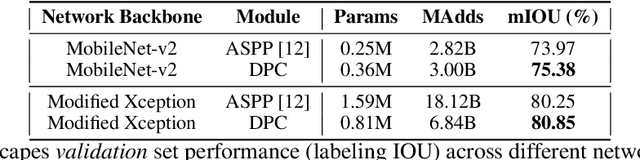
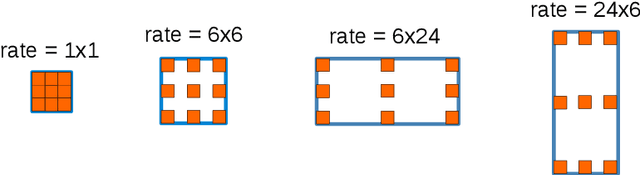
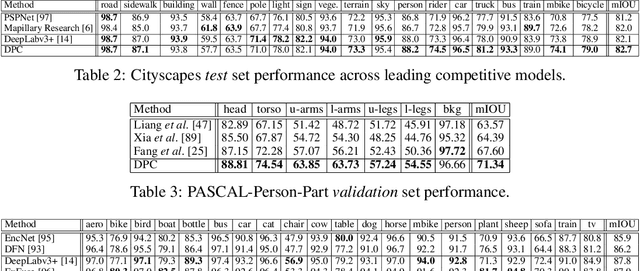
The design of neural network architectures is an important component for achieving state-of-the-art performance with machine learning systems across a broad array of tasks. Much work has endeavored to design and build architectures automatically through clever construction of a search space paired with simple learning algorithms. Recent progress has demonstrated that such meta-learning methods may exceed scalable human-invented architectures on image classification tasks. An open question is the degree to which such methods may generalize to new domains. In this work we explore the construction of meta-learning techniques for dense image prediction focused on the tasks of scene parsing, person-part segmentation, and semantic image segmentation. Constructing viable search spaces in this domain is challenging because of the multi-scale representation of visual information and the necessity to operate on high resolution imagery. Based on a survey of techniques in dense image prediction, we construct a recursive search space and demonstrate that even with efficient random search, we can identify architectures that outperform human-invented architectures and achieve state-of-the-art performance on three dense prediction tasks including 82.7\% on Cityscapes (street scene parsing), 71.3\% on PASCAL-Person-Part (person-part segmentation), and 87.9\% on PASCAL VOC 2012 (semantic image segmentation). Additionally, the resulting architecture is more computationally efficient, requiring half the parameters and half the computational cost as previous state of the art systems.
Backprop Evolution
Aug 08, 2018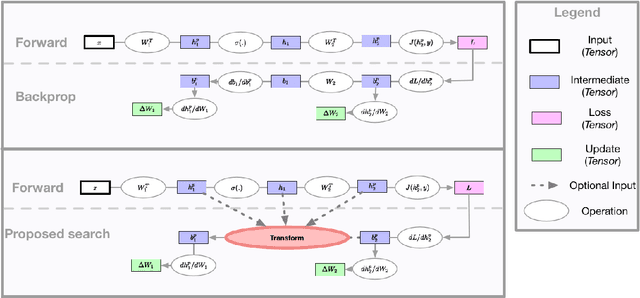
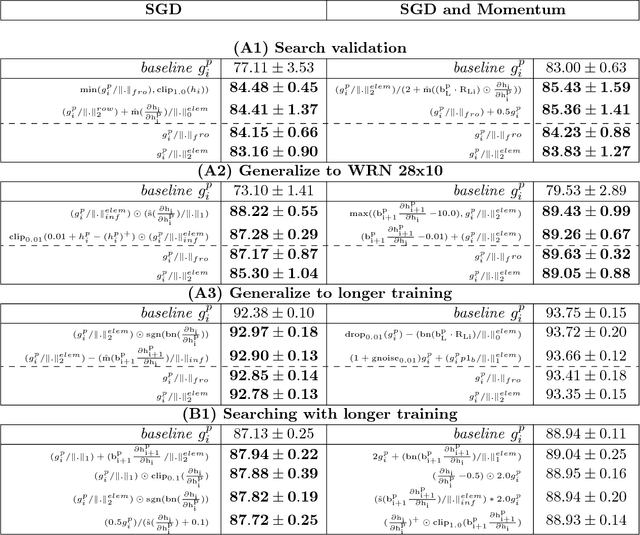
The back-propagation algorithm is the cornerstone of deep learning. Despite its importance, few variations of the algorithm have been attempted. This work presents an approach to discover new variations of the back-propagation equation. We use a domain specific lan- guage to describe update equations as a list of primitive functions. An evolution-based method is used to discover new propagation rules that maximize the generalization per- formance after a few epochs of training. We find several update equations that can train faster with short training times than standard back-propagation, and perform similar as standard back-propagation at convergence.
Progressive Neural Architecture Search
Jul 26, 2018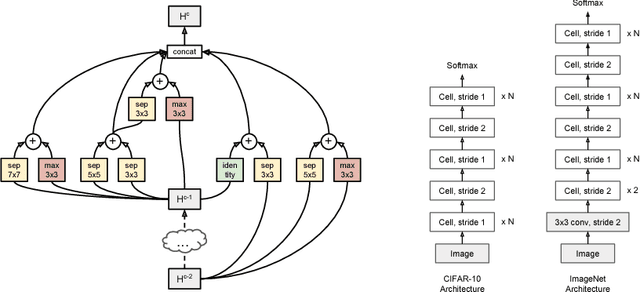
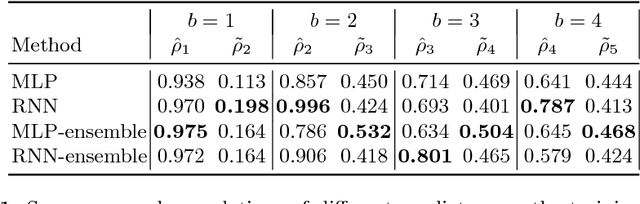
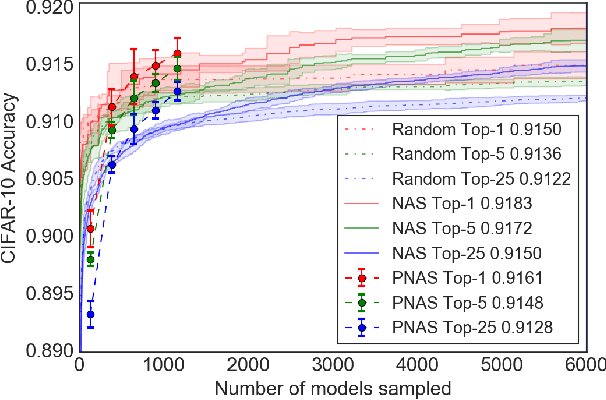
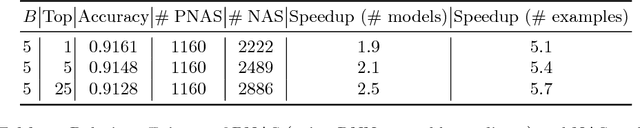
We propose a new method for learning the structure of convolutional neural networks (CNNs) that is more efficient than recent state-of-the-art methods based on reinforcement learning and evolutionary algorithms. Our approach uses a sequential model-based optimization (SMBO) strategy, in which we search for structures in order of increasing complexity, while simultaneously learning a surrogate model to guide the search through structure space. Direct comparison under the same search space shows that our method is up to 5 times more efficient than the RL method of Zoph et al. (2018) in terms of number of models evaluated, and 8 times faster in terms of total compute. The structures we discover in this way achieve state of the art classification accuracies on CIFAR-10 and ImageNet.