 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLENS: Global Search via Learning from Solver Iterates with Diffusion Models
May 29, 2026We consider the problem of generating a large collection of initial guesses for local minima of multimodal non-convex continuous optimization problems. The goal is for these initial guesses to be high-quality (i.e., a numerical solver converges quickly) and diverse (i.e., represent many different local minima). Identifying multiple locally optimal solutions enables flexible downstream decision-making, but typically requires expensive global search. Existing data-driven methods predict initial guesses using only the final converged optima from offline solver runs, which discards information about the local neighborhoods of solutions and limits the available training data. We propose GLENS (Global Search via Learning from Solver Iterates), a data-efficient global search method that leverages intermediate solver iterates as free data augmentation. GLENS consists of two components: a neighborhood structure model that uses diffusion models to learn the local geometry around optima conditioned on problem parameters, and a solver behavior model that learns refinement directions to further guide samples towards nearby optima during diffusion sampling. Experiments on modified non-convex benchmark problems and a two-robot obstacle-avoidance navigation problem show that GLENS generates high-quality initial guesses while preserving the multimodal distribution of diverse local optima. The resulting initial guesses lead to faster solver convergence across different problem settings and solvers. We also analyze how key hyperparameter choices affect the performance.
Adaptive Time Step Flow Matching for Autonomous Driving Motion Planning
Feb 14, 2026Autonomous driving requires reasoning about interactions with surrounding traffic. A prevailing approach is large-scale imitation learning on expert driving datasets, aimed at generalizing across diverse real-world scenarios. For online trajectory generation, such methods must operate at real-time rates. Diffusion models require hundreds of denoising steps at inference, resulting in high latency. Consistency models mitigate this issue but rely on carefully tuned noise schedules to capture the multimodal action distributions common in autonomous driving. Adapting the schedule, typically requires expensive retraining. To address these limitations, we propose a framework based on conditional flow matching that jointly predicts future motions of surrounding agents and plans the ego trajectory in real time. We train a lightweight variance estimator that selects the number of inference steps online, removing the need for retraining to balance runtime and imitation learning performance. To further enhance ride quality, we introduce a trajectory post-processing step cast as a convex quadratic program, with negligible computational overhead. Trained on the Waymo Open Motion Dataset, the framework performs maneuvers such as lane changes, cruise control, and navigating unprotected left turns without requiring scenario-specific tuning. Our method maintains a 20 Hz update rate on an NVIDIA RTX 3070 GPU, making it suitable for online deployment. Compared to transformer, diffusion, and consistency model baselines, we achieve improved trajectory smoothness and better adherence to dynamic constraints. Experiment videos and code implementations can be found at https://flow-matching-self-driving.github.io/.
Recurrent Autoregressive Diffusion: Global Memory Meets Local Attention
Nov 17, 2025
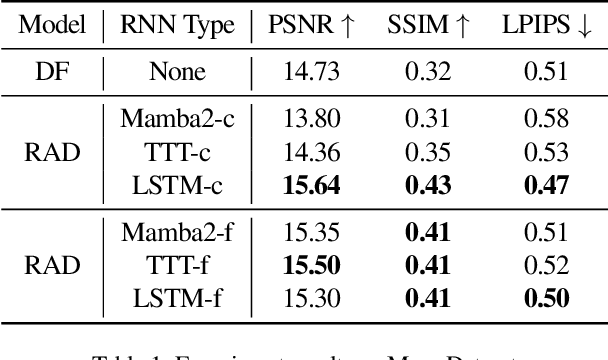

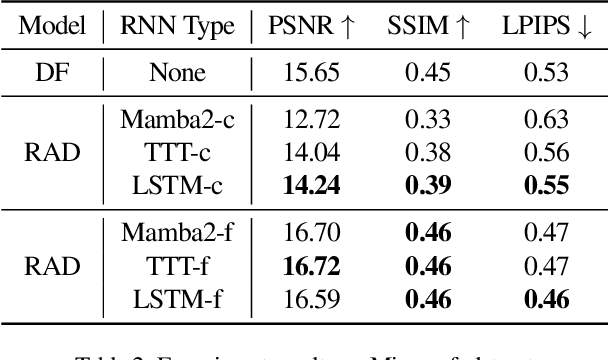
Recent advancements in video generation have demonstrated the potential of using video diffusion models as world models, with autoregressive generation of infinitely long videos through masked conditioning. However, such models, usually with local full attention, lack effective memory compression and retrieval for long-term generation beyond the window size, leading to issues of forgetting and spatiotemporal inconsistencies. To enhance the retention of historical information within a fixed memory budget, we introduce a recurrent neural network (RNN) into the diffusion transformer framework. Specifically, a diffusion model incorporating LSTM with attention achieves comparable performance to state-of-the-art RNN blocks, such as TTT and Mamba2. Moreover, existing diffusion-RNN approaches often suffer from performance degradation due to training-inference gap or the lack of overlap across windows. To address these limitations, we propose a novel Recurrent Autoregressive Diffusion (RAD) framework, which executes frame-wise autoregression for memory update and retrieval, consistently across training and inference time. Experiments on Memory Maze and Minecraft datasets demonstrate the superiority of RAD for long video generation, highlighting the efficiency of LSTM in sequence modeling.
Aligning Diffusion Model with Problem Constraints for Trajectory Optimization
Apr 01, 2025Diffusion models have recently emerged as effective generative frameworks for trajectory optimization, capable of producing high-quality and diverse solutions. However, training these models in a purely data-driven manner without explicit incorporation of constraint information often leads to violations of critical constraints, such as goal-reaching, collision avoidance, and adherence to system dynamics. To address this limitation, we propose a novel approach that aligns diffusion models explicitly with problem-specific constraints, drawing insights from the Dynamic Data-driven Application Systems (DDDAS) framework. Our approach introduces a hybrid loss function that explicitly measures and penalizes constraint violations during training. Furthermore, by statistically analyzing how constraint violations evolve throughout the diffusion steps, we develop a re-weighting strategy that aligns predicted violations to ground truth statistics at each diffusion step. Evaluated on a tabletop manipulation and a two-car reach-avoid problem, our constraint-aligned diffusion model significantly reduces constraint violations compared to traditional diffusion models, while maintaining the quality of trajectory solutions. This approach is well-suited for integration into the DDDAS framework for efficient online trajectory adaptation as new environmental data becomes available.
End-to-End Predictive Planner for Autonomous Driving with Consistency Models
Feb 12, 2025



Trajectory prediction and planning are fundamental components for autonomous vehicles to navigate safely and efficiently in dynamic environments. Traditionally, these components have often been treated as separate modules, limiting the ability to perform interactive planning and leading to computational inefficiency in multi-agent scenarios. In this paper, we present a novel unified and data-driven framework that integrates prediction and planning with a single consistency model. Trained on real-world human driving datasets, our consistency model generates samples from high-dimensional, multimodal joint trajectory distributions of the ego and multiple surrounding agents, enabling end-to-end predictive planning. It effectively produces interactive behaviors, such as proactive nudging and yielding to ensure both safe and efficient interactions with other road users. To incorporate additional planning constraints on the ego vehicle, we propose an alternating direction method for multi-objective guidance in online guided sampling. Compared to diffusion models, our consistency model achieves better performance with fewer sampling steps, making it more suitable for real-time deployment. Experimental results on Waymo Open Motion Dataset (WOMD) demonstrate our method's superiority in trajectory quality, constraint satisfaction, and interactive behavior compared to various existing approaches.
Global Search of Optimal Spacecraft Trajectories using Amortization and Deep Generative Models
Dec 28, 2024



Preliminary spacecraft trajectory optimization is a parameter dependent global search problem that aims to provide a set of solutions that are of high quality and diverse. In the case of numerical solution, it is dependent on the original optimal control problem, the choice of a control transcription, and the behavior of a gradient based numerical solver. In this paper we formulate the parameterized global search problem as the task of sampling a conditional probability distribution with support on the neighborhoods of local basins of attraction to the high quality solutions. The conditional distribution is learned and represented using deep generative models that allow for prediction of how the local basins change as parameters vary. The approach is benchmarked on a low thrust spacecraft trajectory optimization problem in the circular restricted three-body problem, showing significant speed-up over a simple multi-start method and vanilla machine learning approaches. The paper also provides an in-depth analysis of the multi-modal funnel structure of a low-thrust spacecraft trajectory optimization problem.
Learning Optimal Control and Dynamical Structure of Global Trajectory Search Problems with Diffusion Models
Oct 03, 2024



Spacecraft trajectory design is a global search problem, where previous work has revealed specific solution structures that can be captured with data-driven methods. This paper explores two global search problems in the circular restricted three-body problem: hybrid cost function of minimum fuel/time-of-flight and transfers to energy-dependent invariant manifolds. These problems display a fundamental structure either in the optimal control profile or the use of dynamical structures. We build on our prior generative machine learning framework to apply diffusion models to learn the conditional probability distribution of the search problem and analyze the model's capability to capture these structures.
Constraint-Aware Diffusion Models for Trajectory Optimization
Jun 03, 2024



The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
Predicting Long-Term Human Behaviors in Discrete Representations via Physics-Guided Diffusion
May 29, 2024



Long-term human trajectory prediction is a challenging yet critical task in robotics and autonomous systems. Prior work that studied how to predict accurate short-term human trajectories with only unimodal features often failed in long-term prediction. Reinforcement learning provides a good solution for learning human long-term behaviors but can suffer from challenges in data efficiency and optimization. In this work, we propose a long-term human trajectory forecasting framework that leverages a guided diffusion model to generate diverse long-term human behaviors in a high-level latent action space, obtained via a hierarchical action quantization scheme using a VQ-VAE to discretize continuous trajectories and the available context. The latent actions are predicted by our guided diffusion model, which uses physics-inspired guidance at test time to constrain generated multimodal action distributions. Specifically, we use reachability analysis during the reverse denoising process to guide the diffusion steps toward physically feasible latent actions. We evaluate our framework on two publicly available human trajectory forecasting datasets: SFU-Store-Nav and JRDB, and extensive experimental results show that our framework achieves superior performance in long-term human trajectory forecasting.
Efficient and Guaranteed-Safe Non-Convex Trajectory Optimization with Constrained Diffusion Model
Feb 22, 2024



Trajectory optimization in robotics poses a challenging non-convex problem due to complex dynamics and environmental settings. Traditional numerical optimization methods are time-consuming in finding feasible solutions, whereas data-driven approaches lack safety guarantees for the output trajectories. In this paper, we introduce a general and fully parallelizable framework that combines diffusion models and numerical solvers for non-convex trajectory optimization, ensuring both computational efficiency and constraint satisfaction. A novel constrained diffusion model is proposed with an additional constraint violation loss for training. It aims to approximate the distribution of locally optimal solutions while minimizing constraint violations during sampling. The samples are then used as initial guesses for a numerical solver to refine and derive final solutions with formal verification of feasibility and optimality. Experimental evaluations on three tasks over different robotics domains verify the improved constraint satisfaction and computational efficiency with 4$\times$ to 22$\times$ acceleration using our proposed method, which generalizes across trajectory optimization problems and scales well with problem complexity.