 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrefill Awareness in Large Language Models
Jun 10, 2026Safety-relevant studies of language models, including alignment and jailbreaking evaluations and AI control protocols, often rely on prefilling model outputs. If AI models can recognize and act on the fact their prior assistant messages have been inserted or edited, the effectiveness and validity of these methods could be compromised. We investigate whether frontier language models can distinguish between tampered and untampered assistant-side context, a capability we call prefill awareness. To do so, we construct a binary preference benchmark across three prefill mechanisms, filtering for cases where models show consistent stances. We find that frontier models show substantial prefill awareness: Claude Opus 4.5 detects prefills opposing its preferences in 9-35% of cases with a 0% false positive rate when prompted; additionally, models often revert towards baseline behavior without explicitly reporting that the prefill was foreign. Controlled ablations later also show that detection and resistance rely on different cues, where stylistic mismatch mainly affects whether models flag a prefill as foreign, while preference mismatch mainly affects whether they revert toward their baseline answer. We also examine more realistic agentic settings such as misalignment-continuation evaluations and SWE-bench trajectories, where frontier models sometimes disavow prefilled assistant turns in ways that depend strongly on dataset, task success, and hidden formatting artifacts. Our results indicate that prefill awareness is already a substantial confound for some prefill-based methods. We recommend that model developers track this capability in frontier systems.
Flow Control: Steering Vision-Language-Action Models with Simple Real-Time Inputs
Jun 08, 2026We introduce flow control of vision-language-action (VLA) models, a simple and effective way to steer VLA actions in real-time through generic inputs, such as a keyboard. This method can be used out-of-the-box and does not require retraining or fine-tuning VLAs. It enables relatively crude user inputs to steer a VLA to align with user intent. The VLA transforms these inputs into action samples drawn from the VLA expert action distribution learned during training, so that the generated actions are high quality (conformity to the action expert distribution) and high fidelity (reflecting the user's intent). We demonstrate that flow control has many desirable properties: (1) flow control accurately and responsively steers robot actions with user inputs, (2) it is robust to suboptimal user inputs, (3) it enables users to steer VLAs to achieve significantly higher success rates and faster task completion, and (4) fine-tuning a VLA on flow control trajectories improves the autonomous policy. Together, these results provide a simple and intuitive way for users to help steer VLA actions, increasing task performance.
An Independent Safety Evaluation of Kimi K2.5
Apr 03, 2026Kimi K2.5 is an open-weight LLM that rivals closed models across coding, multimodal, and agentic benchmarks, but was released without an accompanying safety evaluation. In this work, we conduct a preliminary safety assessment of Kimi K2.5 focusing on risks likely to be exacerbated by powerful open-weight models. Specifically, we evaluate the model for CBRNE misuse risk, cybersecurity risk, misalignment, political censorship, bias, and harmlessness, in both agentic and non-agentic settings. We find that Kimi K2.5 shows similar dual-use capabilities to GPT 5.2 and Claude Opus 4.5, but with significantly fewer refusals on CBRNE-related requests, suggesting it may uplift malicious actors in weapon creation. On cyber-related tasks, we find that Kimi K2.5 demonstrates competitive cybersecurity performance, but it does not appear to possess frontier-level autonomous cyberoffensive capabilities such as vulnerability discovery and exploitation. We further find that Kimi K2.5 shows concerning levels of sabotage ability and self-replication propensity, although it does not appear to have long-term malicious goals. In addition, Kimi K2.5 exhibits narrow censorship and political bias, especially in Chinese, and is more compliant with harmful requests related to spreading disinformation and copyright infringement. Finally, we find the model refuses to engage in user delusions and generally has low over-refusal rates. While preliminary, our findings highlight how safety risks exist in frontier open-weight models and may be amplified by the scale and accessibility of open-weight releases. Therefore, we strongly urge open-weight model developers to conduct and release more systematic safety evaluations required for responsible deployment.
EpochX: Building the Infrastructure for an Emergent Agent Civilization
Mar 28, 2026General-purpose technologies reshape economies less by improving individual tools than by enabling new ways to organize production and coordination. We believe AI agents are approaching a similar inflection point: as foundation models make broad task execution and tool use increasingly accessible, the binding constraint shifts from raw capability to how work is delegated, verified, and rewarded at scale. We introduce EpochX, a credits-native marketplace infrastructure for human-agent production networks. EpochX treats humans and agents as peer participants who can post tasks or claim them. Claimed tasks can be decomposed into subtasks and executed through an explicit delivery workflow with verification and acceptance. Crucially, EpochX is designed so that each completed transaction can produce reusable ecosystem assets, including skills, workflows, execution traces, and distilled experience. These assets are stored with explicit dependency structure, enabling retrieval, composition, and cumulative improvement over time. EpochX also introduces a native credit mechanism to make participation economically viable under real compute costs. Credits lock task bounties, budget delegation, settle rewards upon acceptance, and compensate creators when verified assets are reused. By formalizing the end-to-end transaction model together with its asset and incentive layers, EpochX reframes agentic AI as an organizational design problem: building infrastructures where verifiable work leaves persistent, reusable artifacts, and where value flows support durable human-agent collaboration.
DiSCo: Diffusion Sequence Copilots for Shared Autonomy
Mar 24, 2026Shared autonomy combines human user and AI copilot actions to control complex systems such as robotic arms. When a task is challenging, requires high dimensional control, or is subject to corruption, shared autonomy can significantly increase task performance by using a trained copilot to effectively correct user actions in a manner consistent with the user's goals. To significantly improve the performance of shared autonomy, we introduce Diffusion Sequence Copilots (DiSCo): a method of shared autonomy with diffusion policy that plans action sequences consistent with past user actions. DiSCo seeds and inpaints the diffusion process with user-provided actions with hyperparameters to balance conformity to expert actions, alignment with user intent, and perceived responsiveness. We demonstrate that DiSCo substantially improves task performance in simulated driving and robotic arm tasks. Project website: https://sites.google.com/view/disco-shared-autonomy/
Geometric Deep Learning for Post-Menstrual Age Prediction based on the Neonatal White Matter Cortical Surface
Aug 13, 2020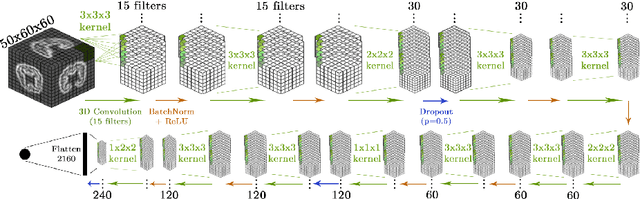
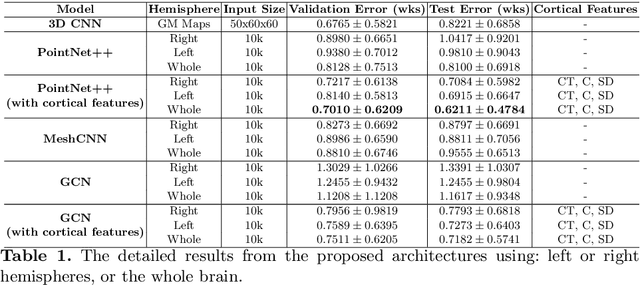

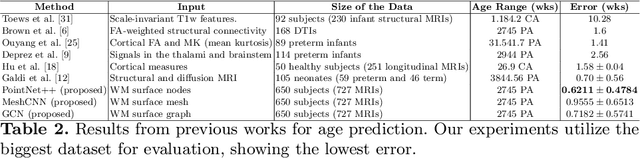
Accurate estimation of the age in neonates is essential for measuring neurodevelopmental, medical, and growth outcomes. In this paper, we propose a novel approach to predict the post-menstrual age (PA) at scan, using techniques from geometric deep learning, based on the neonatal white matter cortical surface. We utilize and compare multiple specialized neural network architectures that predict the age using different geometric representations of the cortical surface; we compare MeshCNN, Pointnet++, GraphCNN, and a volumetric benchmark. The dataset is part of the Developing Human Connectome Project (dHCP), and is a cohort of healthy and premature neonates. We evaluate our approach on 650 subjects (727scans) with PA ranging from 27 to 45 weeks. Our results show accurate prediction of the estimated PA, with mean error less than one week.