 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Learning of 3D Object Categories from Videos in the Wild
Mar 30, 2021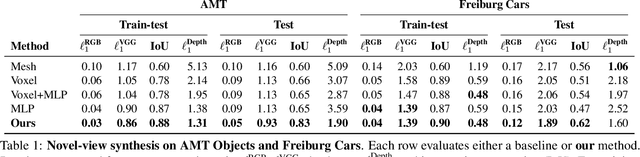
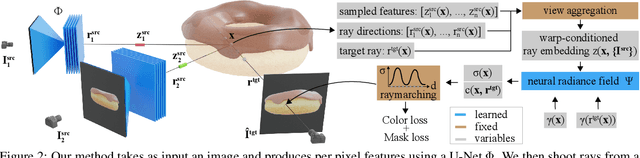
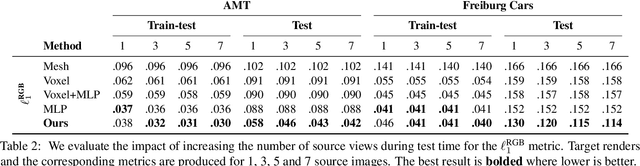
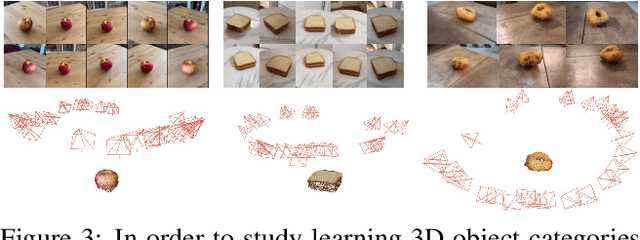
Our goal is to learn a deep network that, given a small number of images of an object of a given category, reconstructs it in 3D. While several recent works have obtained analogous results using synthetic data or assuming the availability of 2D primitives such as keypoints, we are interested in working with challenging real data and with no manual annotations. We thus focus on learning a model from multiple views of a large collection of object instances. We contribute with a new large dataset of object centric videos suitable for training and benchmarking this class of models. We show that existing techniques leveraging meshes, voxels, or implicit surfaces, which work well for reconstructing isolated objects, fail on this challenging data. Finally, we propose a new neural network design, called warp-conditioned ray embedding (WCR), which significantly improves reconstruction while obtaining a detailed implicit representation of the object surface and texture, also compensating for the noise in the initial SfM reconstruction that bootstrapped the learning process. Our evaluation demonstrates performance improvements over several deep monocular reconstruction baselines on existing benchmarks and on our novel dataset.
Space-Time Crop & Attend: Improving Cross-modal Video Representation Learning
Mar 18, 2021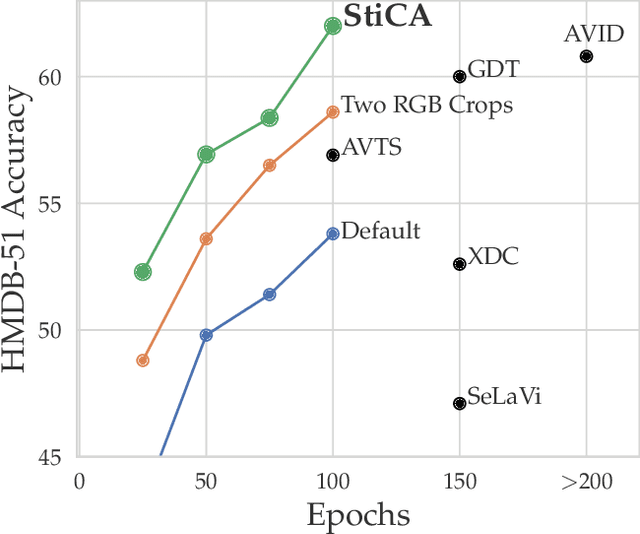
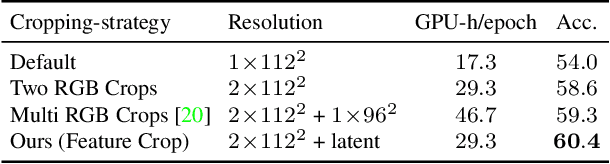
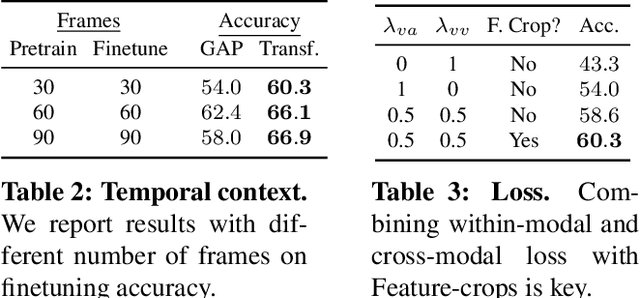
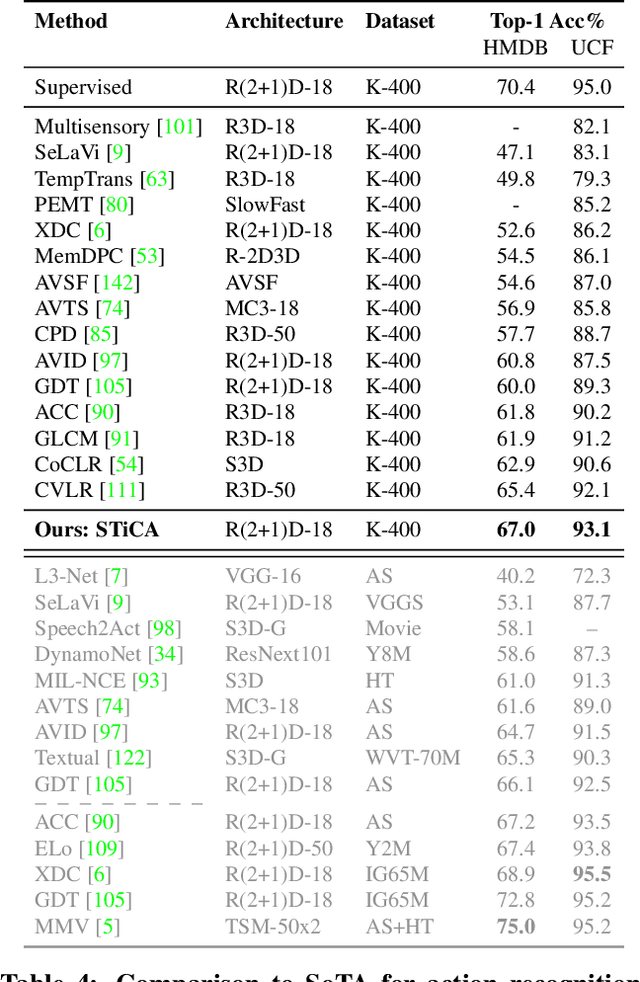
The quality of the image representations obtained from self-supervised learning depends strongly on the type of data augmentations used in the learning formulation. Recent papers have ported these methods from still images to videos and found that leveraging both audio and video signals yields strong gains; however, they did not find that spatial augmentations such as cropping, which are very important for still images, work as well for videos. In this paper, we improve these formulations in two ways unique to the spatio-temporal aspect of videos. First, for space, we show that spatial augmentations such as cropping do work well for videos too, but that previous implementations, due to the high processing and memory cost, could not do this at a scale sufficient for it to work well. To address this issue, we first introduce Feature Crop, a method to simulate such augmentations much more efficiently directly in feature space. Second, we show that as opposed to naive average pooling, the use of transformer-based attention improves performance significantly, and is well suited for processing feature crops. Combining both of our discoveries into a new method, Space-time Crop & Attend (STiCA) we achieve state-of-the-art performance across multiple video-representation learning benchmarks. In particular, we achieve new state-of-the-art accuracies of 67.0% on HMDB-51 and 93.1% on UCF-101 when pre-training on Kinetics-400.
Continuous Surface Embeddings
Nov 24, 2020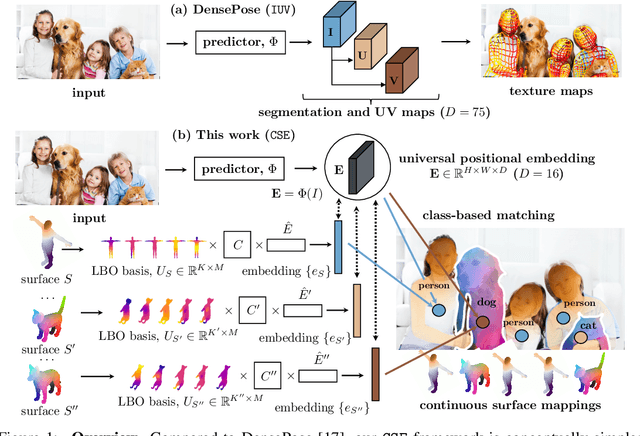
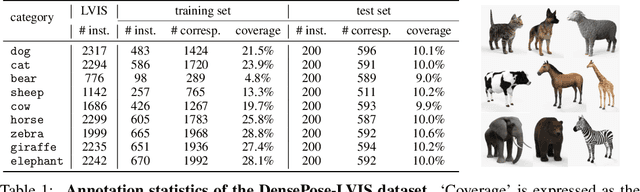
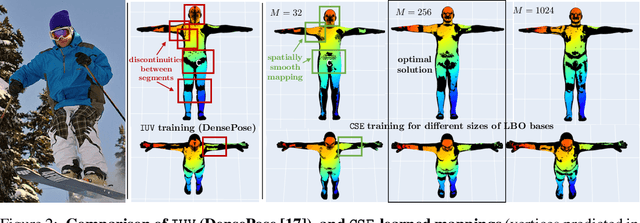
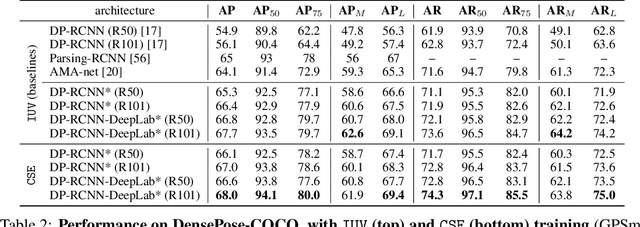
In this work, we focus on the task of learning and representing dense correspondences in deformable object categories. While this problem has been considered before, solutions so far have been rather ad-hoc for specific object types (i.e., humans), often with significant manual work involved. However, scaling the geometry understanding to all objects in nature requires more automated approaches that can also express correspondences between related, but geometrically different objects. To this end, we propose a new, learnable image-based representation of dense correspondences. Our model predicts, for each pixel in a 2D image, an embedding vector of the corresponding vertex in the object mesh, therefore establishing dense correspondences between image pixels and 3D object geometry. We demonstrate that the proposed approach performs on par or better than the state-of-the-art methods for dense pose estimation for humans, while being conceptually simpler. We also collect a new in-the-wild dataset of dense correspondences for animal classes and demonstrate that our framework scales naturally to the new deformable object categories.
3D Multi-bodies: Fitting Sets of Plausible 3D Human Models to Ambiguous Image Data
Nov 02, 2020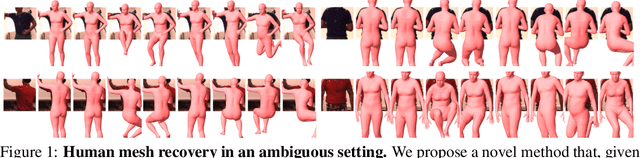
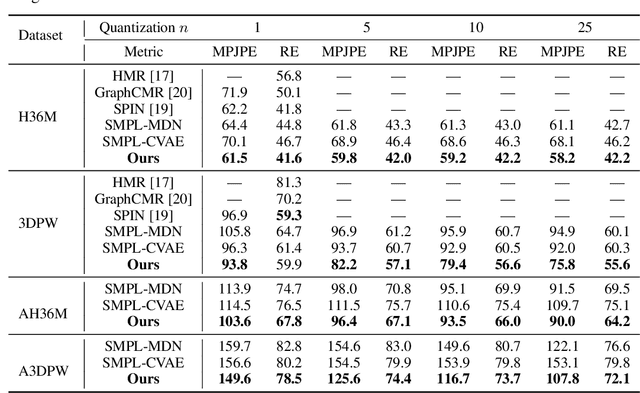
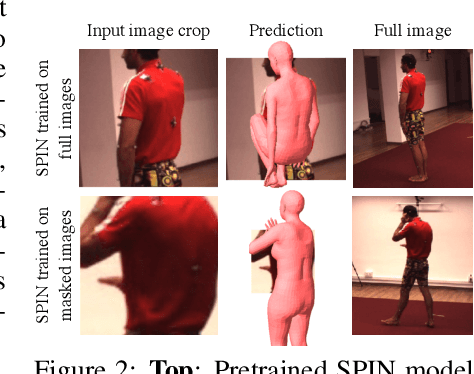
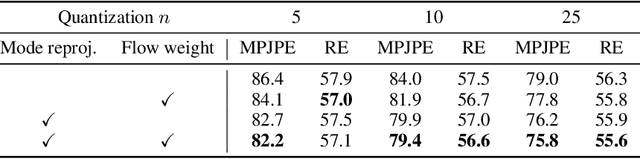
We consider the problem of obtaining dense 3D reconstructions of humans from single and partially occluded views. In such cases, the visual evidence is usually insufficient to identify a 3D reconstruction uniquely, so we aim at recovering several plausible reconstructions compatible with the input data. We suggest that ambiguities can be modelled more effectively by parametrizing the possible body shapes and poses via a suitable 3D model, such as SMPL for humans. We propose to learn a multi-hypothesis neural network regressor using a best-of-M loss, where each of the M hypotheses is constrained to lie on a manifold of plausible human poses by means of a generative model. We show that our method outperforms alternative approaches in ambiguous pose recovery on standard benchmarks for 3D humans, and in heavily occluded versions of these benchmarks.
Quantifying Learnability and Describability of Visual Concepts Emerging in Representation Learning
Oct 27, 2020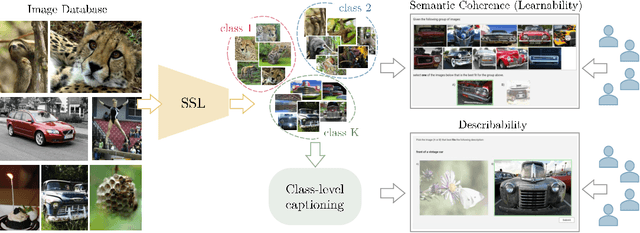
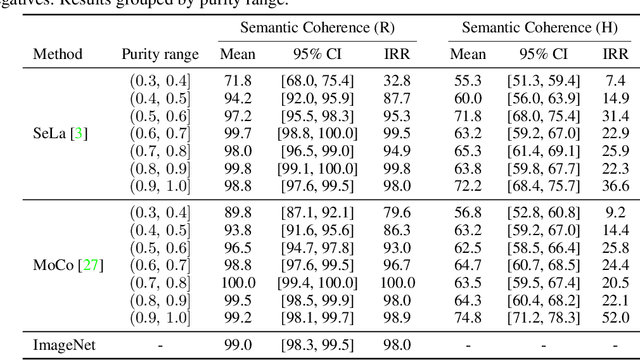
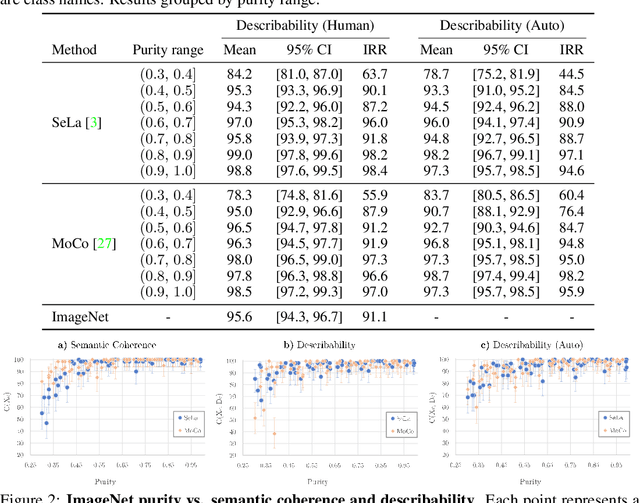
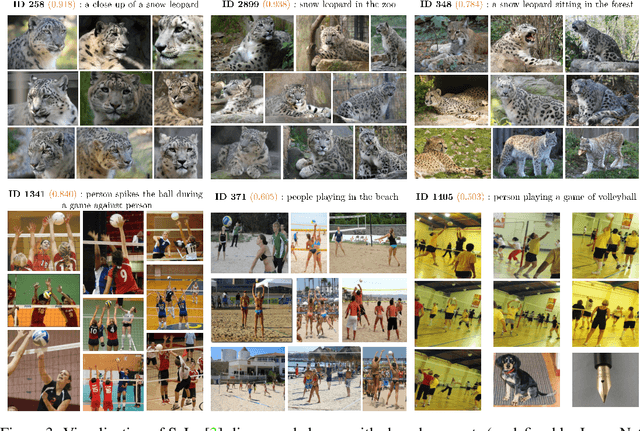
The increasing impact of black box models, and particularly of unsupervised ones, comes with an increasing interest in tools to understand and interpret them. In this paper, we consider in particular how to characterise visual groupings discovered automatically by deep neural networks, starting with state-of-the-art clustering methods. In some cases, clusters readily correspond to an existing labelled dataset. However, often they do not, yet they still maintain an "intuitive interpretability". We introduce two concepts, visual learnability and describability, that can be used to quantify the interpretability of arbitrary image groupings, including unsupervised ones. The idea is to measure (1) how well humans can learn to reproduce a grouping by measuring their ability to generalise from a small set of visual examples (learnability) and (2) whether the set of visual examples can be replaced by a succinct, textual description (describability). By assessing human annotators as classifiers, we remove the subjective quality of existing evaluation metrics. For better scalability, we finally propose a class-level captioning system to generate descriptions for visual groupings automatically and compare it to human annotators using the describability metric.
Support-set bottlenecks for video-text representation learning
Oct 06, 2020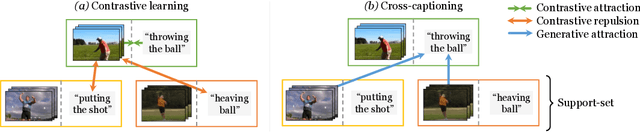
The dominant paradigm for learning video-text representations -- noise contrastive learning -- increases the similarity of the representations of pairs of samples that are known to be related, such as text and video from the same sample, and pushes away the representations of all other pairs. We posit that this last behaviour is too strict, enforcing dissimilar representations even for samples that are semantically-related -- for example, visually similar videos or ones that share the same depicted action. In this paper, we propose a novel method that alleviates this by leveraging a generative model to naturally push these related samples together: each sample's caption must be reconstructed as a weighted combination of other support samples' visual representations. This simple idea ensures that representations are not overly-specialized to individual samples, are reusable across the dataset, and results in representations that explicitly encode semantics shared between samples, unlike noise contrastive learning. Our proposed method outperforms others by a large margin on MSR-VTT, VATEX and ActivityNet, for video-to-text and text-to-video retrieval.
Calibrating Self-supervised Monocular Depth Estimation
Sep 16, 2020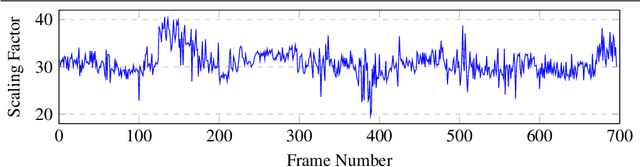

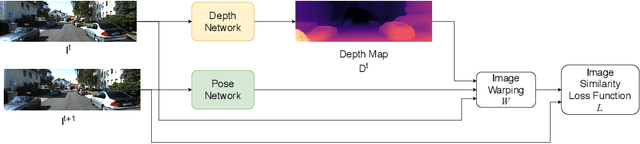
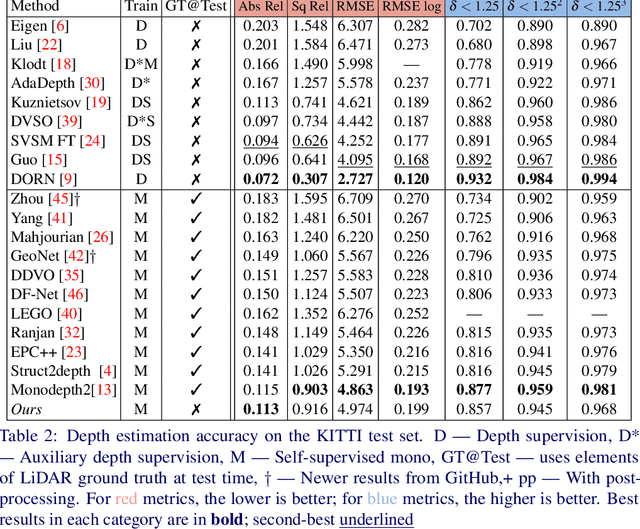
In the recent years, many methods demonstrated the ability of neural networks tolearn depth and pose changes in a sequence of images, using only self-supervision as thetraining signal. Whilst the networks achieve good performance, the often over-lookeddetail is that due to the inherent ambiguity of monocular vision they predict depth up to aunknown scaling factor. The scaling factor is then typically obtained from the LiDARground truth at test time, which severely limits practical applications of these methods.In this paper, we show that incorporating prior information about the camera configu-ration and the environment, we can remove the scale ambiguity and predict depth directly,still using the self-supervised formulation and not relying on any additional sensors.
Canonical 3D Deformer Maps: Unifying parametric and non-parametric methods for dense weakly-supervised category reconstruction
Aug 28, 2020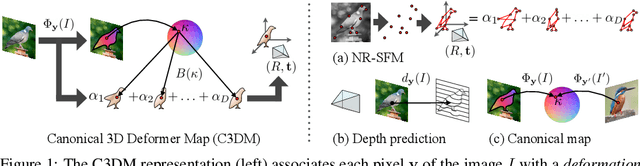
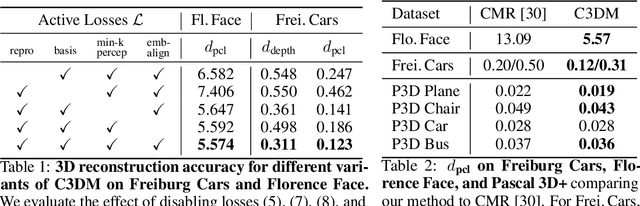
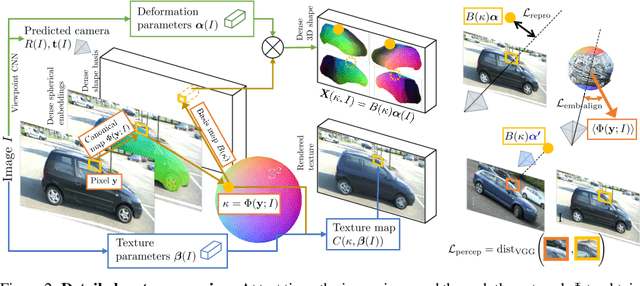
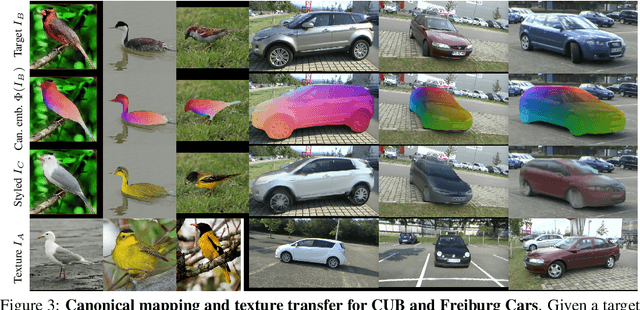
We propose the Canonical 3D Deformer Map, a new representation of the 3D shape of common object categories that can be learned from a collection of 2D images of independent objects. Our method builds in a novel way on concepts from parametric deformation models, non-parametric 3D reconstruction, and canonical embeddings, combining their individual advantages. In particular, it learns to associate each image pixel with a deformation model of the corresponding 3D object point which is canonical, i.e. intrinsic to the identity of the point and shared across objects of the category. The result is a method that, given only sparse 2D supervision at training time, can, at test time, reconstruct the 3D shape and texture of objects from single views, while establishing meaningful dense correspondences between object instances. It also achieves state-of-the-art results in dense 3D reconstruction on public in-the-wild datasets of faces, cars, and birds.
Automatic Recall Machines: Internal Replay, Continual Learning and the Brain
Jul 15, 2020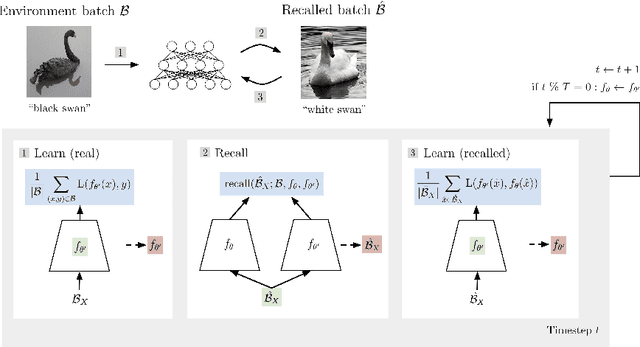
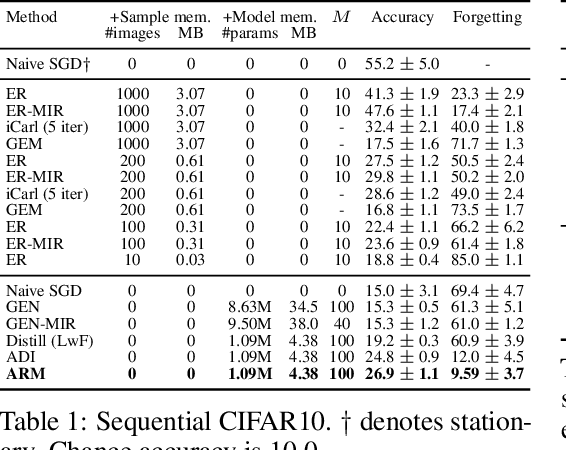
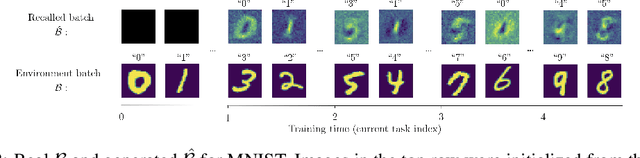
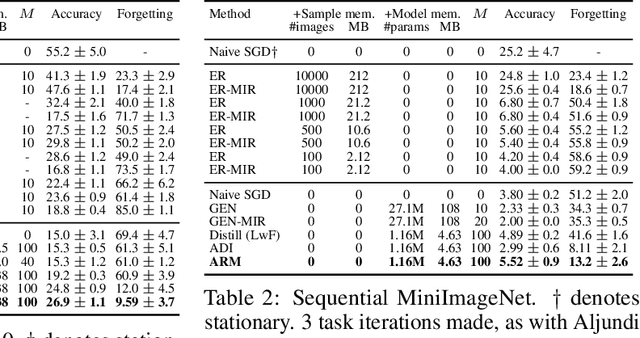
Replay in neural networks involves training on sequential data with memorized samples, which counteracts forgetting of previous behavior caused by non-stationarity. We present a method where these auxiliary samples are generated on the fly, given only the model that is being trained for the assessed objective, without extraneous buffers or generator networks. Instead the implicit memory of learned samples within the assessed model itself is exploited. Furthermore, whereas existing work focuses on reinforcing the full seen data distribution, we show that optimizing for not forgetting calls for the generation of samples that are specialized to each real training batch, which is more efficient and scalable. We consider high-level parallels with the brain, notably the use of a single model for inference and recall, the dependency of recalled samples on the current environment batch, top-down modulation of activations and learning, abstract recall, and the dependency between the degree to which a task is learned and the degree to which it is recalled. These characteristics emerge naturally from the method without being controlled for.
RELATE: Physically Plausible Multi-Object Scene Synthesis Using Structured Latent Spaces
Jul 02, 2020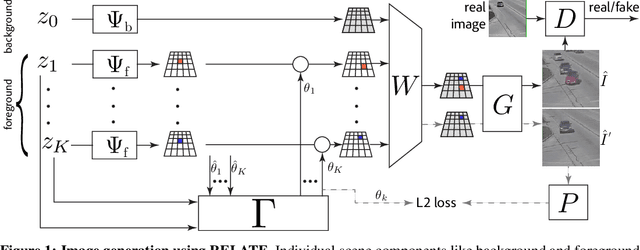
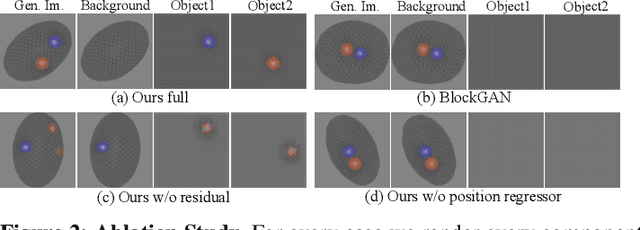
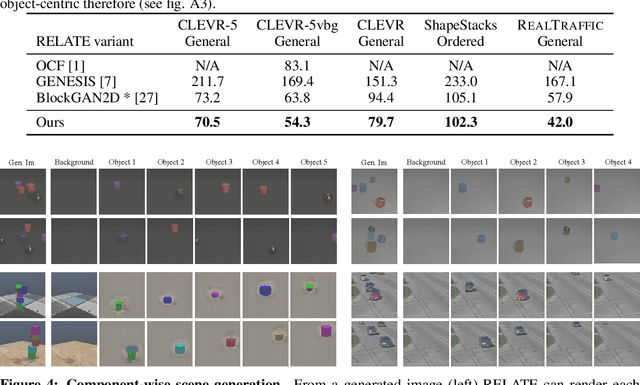
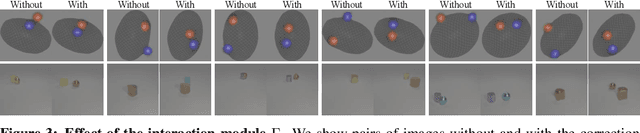
We present RELATE, a model that learns to generate physically plausible scenes and videos of multiple interacting objects. Similar to other generative approaches, RELATE is trained end-to-end on raw, unlabeled data. RELATE combines an object-centric GAN formulation with a model that explicitly accounts for correlations between individual objects. This allows the model to generate realistic scenes and videos from a physically-interpretable parameterization. Furthermore, we show that modeling the object correlation is necessary to learn to disentangle object positions and identity. We find that RELATE is also amenable to physically realistic scene editing and that it significantly outperforms prior art in object-centric scene generation in both synthetic (CLEVR, ShapeStacks) and real-world data (street traffic scenes). In addition, in contrast to state-of-the-art methods in object-centric generative modeling, RELATE also extends naturally to dynamic scenes and generates videos of high visual fidelity