 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Simulation, and Testing of a Flexible Actuated Spine for Quadruped Robots
Sep 11, 2018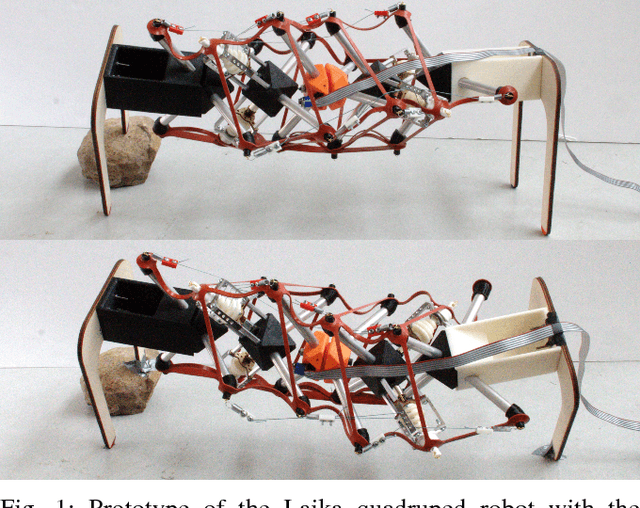
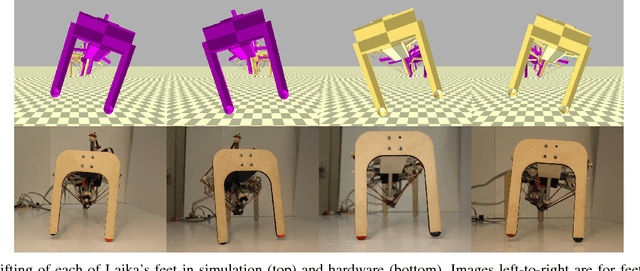
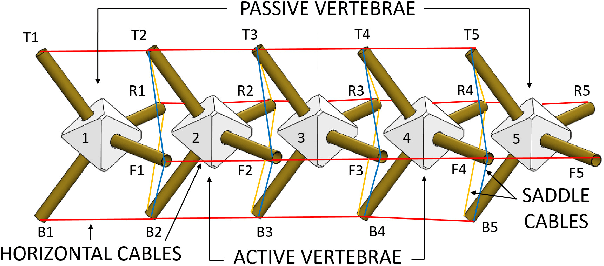
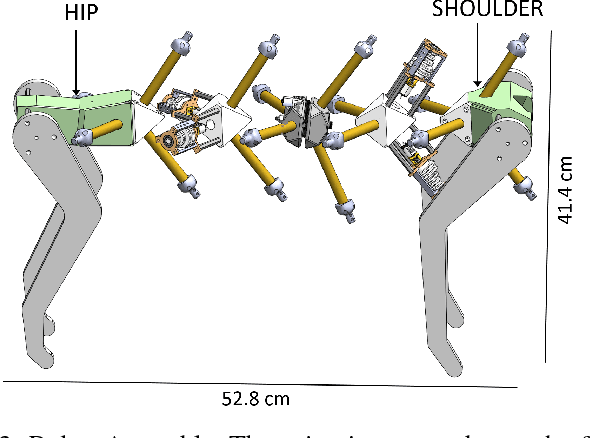
Walking quadruped robots face challenges in positioning their feet and lifting their legs during gait cycles over uneven terrain. The robot Laika is under development as a quadruped with a flexible, actuated spine designed to assist with foot movement and balance during these gaits. This paper presents the first set of hardware designs for the spine of Laika, a physical prototype of those designs, and tests in both hardware and simulations that show the prototype's capabilities. Laika's spine is a tensegrity structure, used for its advantages with weight and force distribution, and represents the first working prototype of a tensegrity spine for a quadruped robot. The spine bends by adjusting the lengths of the cables that separate its vertebrae, and twists using an actuated rotating vertebra at its center. The current prototype of Laika has stiff legs attached to the spine, and is used as a test setup for evaluation of the spine itself. This work shows the advantages of Laika's spine by demonstrating the spine lifting each of the robot's four feet, both as a form of balancing and as a precursor for a walking gait. These foot motions, using specific combinations of bending and rotation movements of the spine, are measured in both simulation and hardware experiments. Hardware data are used to calibrate the simulations, such that the simulations can be used for control of balancing or gait cycles in the future. Future work will attach actuated legs to Laika's spine, and examine balancing and gait cycles when combined with leg movements.
Inverse Kinematics for Control of Tensegrity Soft Robots: Existence and Optimality of Solutions
Aug 24, 2018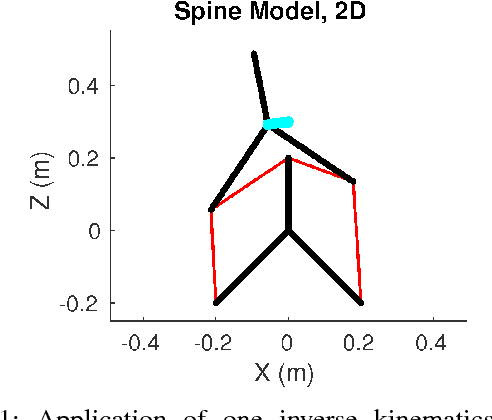
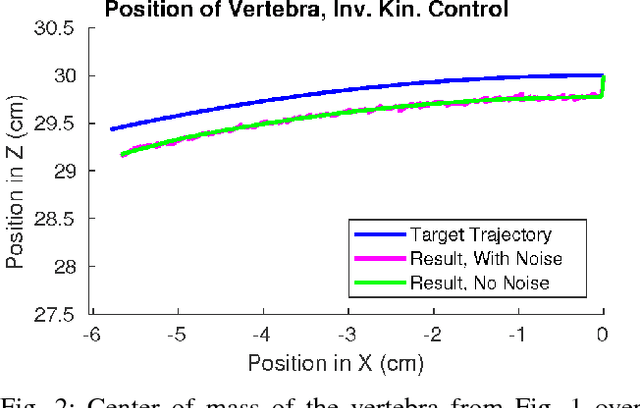
Tension-network (`tensegrity') robots encounter many control challenges as articulated soft robots, due to the structures' high-dimensional nonlinear dynamics. Control approaches have been developed which use the inverse kinematics of tensegrity structures, either for open-loop control or as equilibrium inputs for closed-loop controllers. However, current formulations of the tensegrity inverse kinematics problem are limited in robotics applications: first, they can lead to higher than needed cable tensions, and second, may lack solutions when applied to robots with high node-to-cable ratios. This work provides progress in both directions. To address the first limitation, the objective function for the inverse kinematics optimization problem is modified to produce cable tensions as low or lower than before, thus reducing the load on the robots' motors. For the second, a reformulation of the static equilibrium constraint is proposed, which produces solutions independent of the number of nodes within each rigid body. Simulation results using the second reformulation on a specific tensegrity spine robot show reasonable open-loop control results, whereas the previous formulation could not produce any solution.
Inclined Surface Locomotion Strategies for Spherical Tensegrity Robots
Aug 27, 2017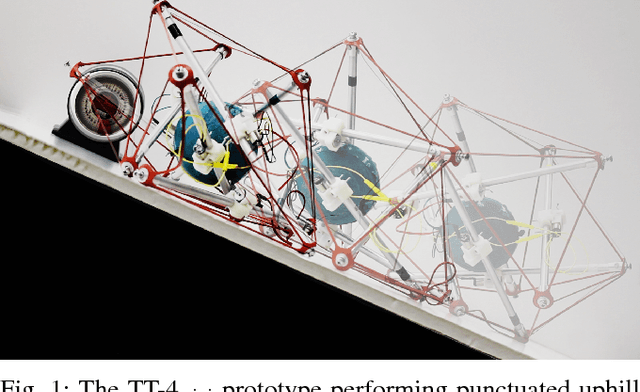
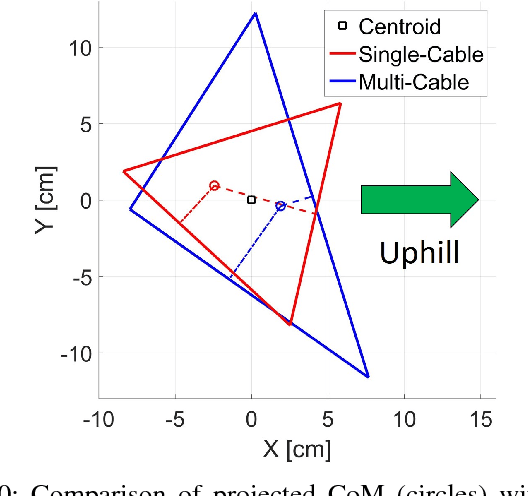
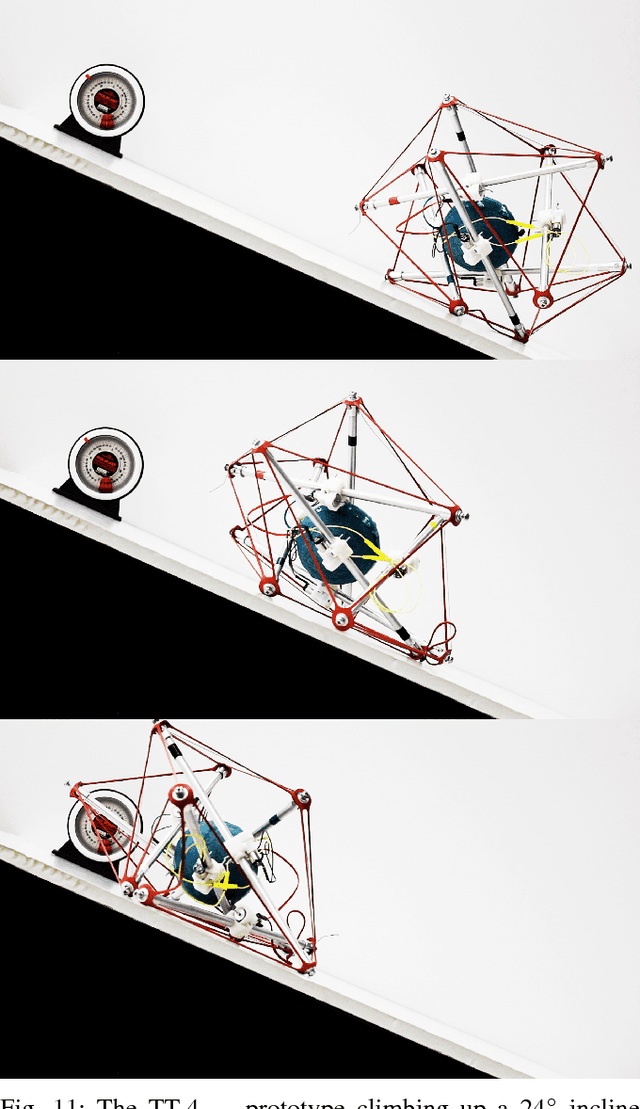
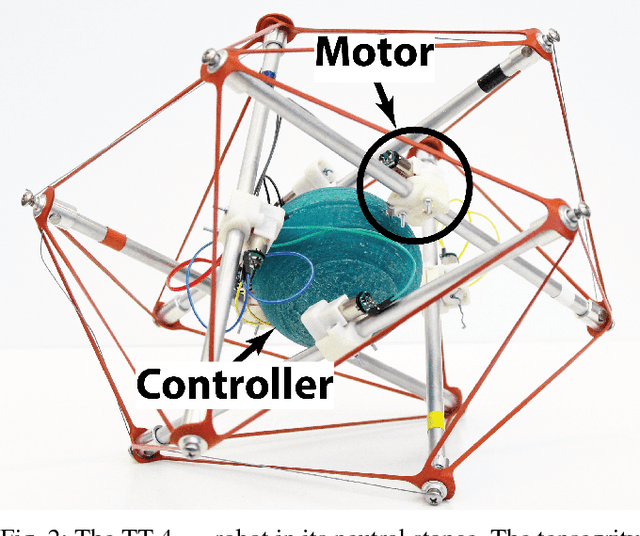
This paper presents a new teleoperated spherical tensegrity robot capable of performing locomotion on steep inclined surfaces. With a novel control scheme centered around the simultaneous actuation of multiple cables, the robot demonstrates robust climbing on inclined surfaces in hardware experiments and speeds significantly faster than previous spherical tensegrity models. This robot is an improvement over other iterations in the TT-series and the first tensegrity to achieve reliable locomotion on inclined surfaces of up to 24\degree. We analyze locomotion in simulation and hardware under single and multi-cable actuation, and introduce two novel multi-cable actuation policies, suited for steep incline climbing and speed, respectively. We propose compelling justifications for the increased dynamic ability of the robot and motivate development of optimization algorithms able to take advantage of the robot's increased control authority.