 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrackletGPT: A Language-like GPT Framework for White Matter Tract Segmentation
Jan 20, 2026White Matter Tract Segmentation is imperative for studying brain structural connectivity, neurological disorders and neurosurgery. This task remains complex, as tracts differ among themselves, across subjects and conditions, yet have similar 3D structure across hemispheres and subjects. To address these challenges, we propose TrackletGPT, a language-like GPT framework which reintroduces sequential information in tokens using tracklets. TrackletGPT generalises seamlessly across datasets, is fully automatic, and encodes granular sub-streamline segments, Tracklets, scaling and refining GPT models in Tractography Segmentation. Based on our experiments, TrackletGPT outperforms state-of-the-art methods on average DICE, Overlap and Overreach scores on TractoInferno and HCP datasets, even on inter-dataset experiments.
TractRLFusion: A GPT-Based Multi-Critic Policy Fusion Framework for Fiber Tractography
Jan 20, 2026Tractography plays a pivotal role in the non-invasive reconstruction of white matter fiber pathways, providing vital information on brain connectivity and supporting precise neurosurgical planning. Although traditional methods relied mainly on classical deterministic and probabilistic approaches, recent progress has benefited from supervised deep learning (DL) and deep reinforcement learning (DRL) to improve tract reconstruction. A persistent challenge in tractography is accurately reconstructing white matter tracts while minimizing spurious connections. To address this, we propose TractRLFusion, a novel GPT-based policy fusion framework that integrates multiple RL policies through a data-driven fusion strategy. Our method employs a two-stage training data selection process for effective policy fusion, followed by a multi-critic fine-tuning phase to enhance robustness and generalization. Experiments on HCP, ISMRM, and TractoInferno datasets demonstrate that TractRLFusion outperforms individual RL policies as well as state-of-the-art classical and DRL methods in accuracy and anatomical reliability.
TractoGPT: A GPT architecture for White Matter Segmentation
Jan 26, 2025



White matter bundle segmentation is crucial for studying brain structural connectivity, neurosurgical planning, and neurological disorders. White Matter Segmentation remains challenging due to structural similarity in streamlines, subject variability, symmetry in 2 hemispheres, etc. To address these challenges, we propose TractoGPT, a GPT-based architecture trained on streamline, cluster, and fusion data representations separately. TractoGPT is a fully-automatic method that generalizes across datasets and retains shape information of the white matter bundles. Experiments also show that TractoGPT outperforms state-of-the-art methods on average DICE, Overlap and Overreach scores. We use TractoInferno and 105HCP datasets and validate generalization across dataset.
TractoEmbed: Modular Multi-level Embedding framework for white matter tract segmentation
Nov 12, 2024



White matter tract segmentation is crucial for studying brain structural connectivity and neurosurgical planning. However, segmentation remains challenging due to issues like class imbalance between major and minor tracts, structural similarity, subject variability, symmetric streamlines between hemispheres etc. To address these challenges, we propose TractoEmbed, a modular multi-level embedding framework, that encodes localized representations through learning tasks in respective encoders. In this paper, TractoEmbed introduces a novel hierarchical streamline data representation that captures maximum spatial information at each level i.e. individual streamlines, clusters, and patches. Experiments show that TractoEmbed outperforms state-of-the-art methods in white matter tract segmentation across different datasets, and spanning various age groups. The modular framework directly allows the integration of additional embeddings in future works.
Tract-RLFormer: A Tract-Specific RL policy based Decoder-only Transformer Network
Nov 08, 2024Fiber tractography is a cornerstone of neuroimaging, enabling the detailed mapping of the brain's white matter pathways through diffusion MRI. This is crucial for understanding brain connectivity and function, making it a valuable tool in neurological applications. Despite its importance, tractography faces challenges due to its complexity and susceptibility to false positives, misrepresenting vital pathways. To address these issues, recent strategies have shifted towards deep learning, utilizing supervised learning, which depends on precise ground truth, or reinforcement learning, which operates without it. In this work, we propose Tract-RLFormer, a network utilizing both supervised and reinforcement learning, in a two-stage policy refinement process that markedly improves the accuracy and generalizability across various data-sets. By employing a tract-specific approach, our network directly delineates the tracts of interest, bypassing the traditional segmentation process. Through rigorous validation on datasets such as TractoInferno, HCP, and ISMRM-2015, our methodology demonstrates a leap forward in tractography, showcasing its ability to accurately map the brain's white matter tracts.
MetaRegNet: Metamorphic Image Registration Using Flow-Driven Residual Networks
Mar 16, 2023


Deep learning based methods provide efficient solutions to medical image registration, including the challenging problem of diffeomorphic image registration. However, most methods register normal image pairs, facing difficulty handling those with missing correspondences, e.g., in the presence of pathology like tumors. We desire an efficient solution to jointly account for spatial deformations and appearance changes in the pathological regions where the correspondences are missing, i.e., finding a solution to metamorphic image registration. Some approaches are proposed to tackle this problem, but they cannot properly handle large pathological regions and deformations around pathologies. In this paper, we propose a deep metamorphic image registration network (MetaRegNet), which adopts time-varying flows to drive spatial diffeomorphic deformations and generate intensity variations. We evaluate MetaRegNet on two datasets, i.e., BraTS 2021 with brain tumors and 3D-IRCADb-01 with liver tumors, showing promising results in registering a healthy and tumor image pair. The source code is available online.
DDR-Net: Dividing and Downsampling Mixed Network for Diffeomorphic Image Registration
May 24, 2021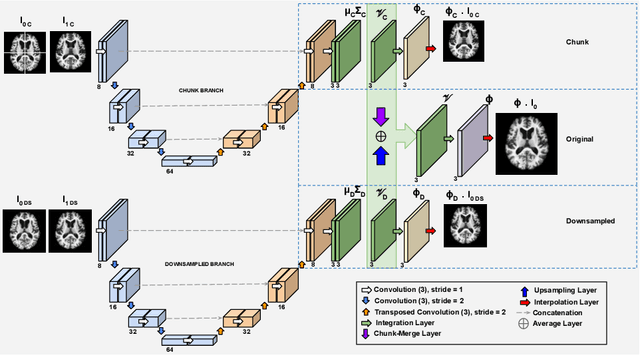
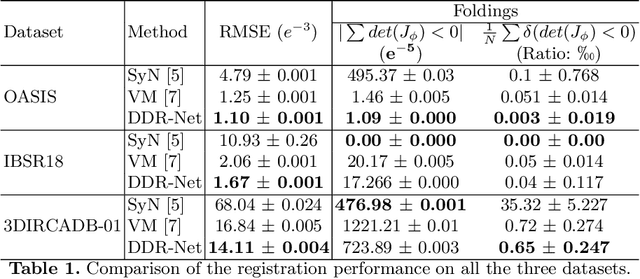
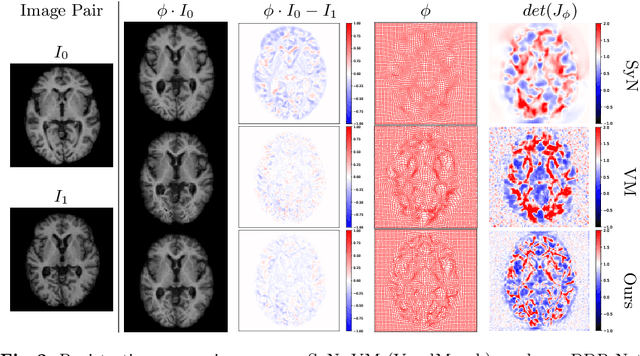
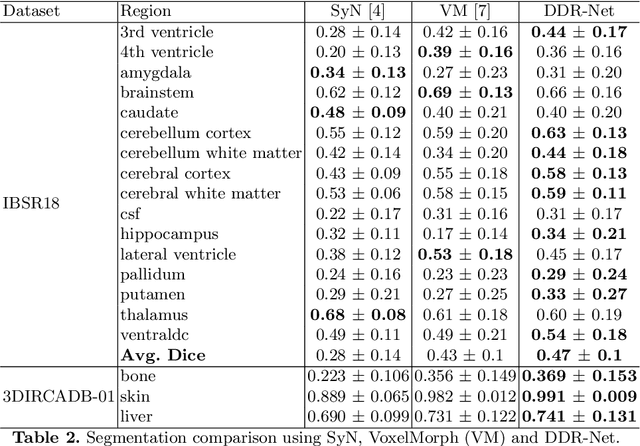
Deep diffeomorphic registration faces significant challenges for high-dimensional images, especially in terms of memory limits. Existing approaches either downsample original images, or approximate underlying transformations, or reduce model size. The information loss during the approximation or insufficient model capacity is a hindrance to the registration accuracy for high-dimensional images, e.g., 3D medical volumes. In this paper, we propose a Dividing and Downsampling mixed Registration network (DDR-Net), a general architecture that preserves most of the image information at multiple scales. DDR-Net leverages the global context via downsampling the input and utilizes the local details from divided chunks of the input images. This design reduces the network input size and its memory cost; meanwhile, by fusing global and local information, DDR-Net obtains both coarse-level and fine-level alignments in the final deformation fields. We evaluate DDR-Net on three public datasets, i.e., OASIS, IBSR18, and 3DIRCADB-01, and the experimental results demonstrate our approach outperforms existing approaches.
Design, Simulation, and Testing of a Flexible Actuated Spine for Quadruped Robots
Sep 11, 2018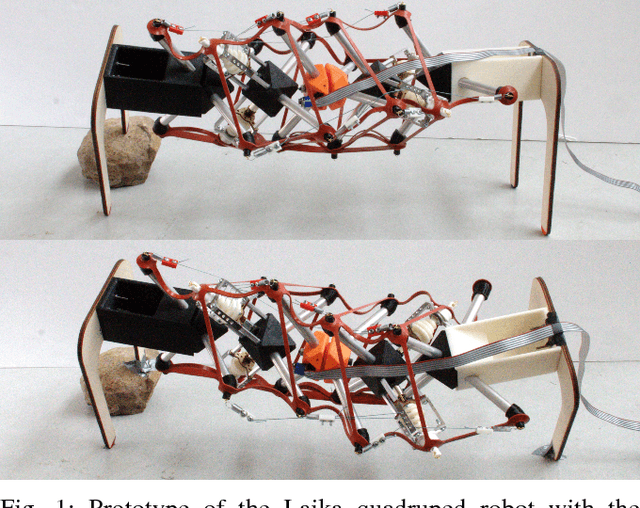
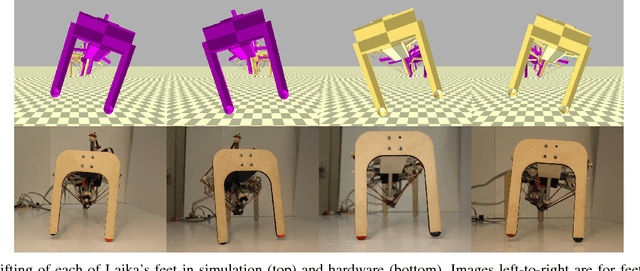
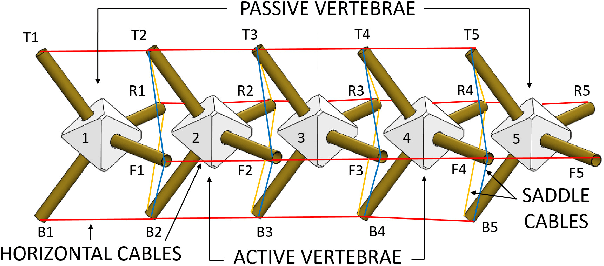
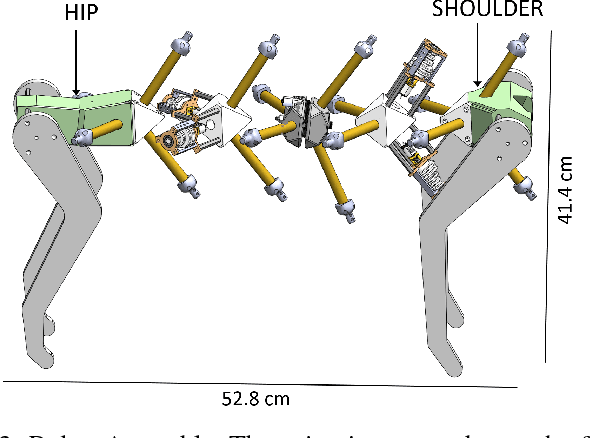
Walking quadruped robots face challenges in positioning their feet and lifting their legs during gait cycles over uneven terrain. The robot Laika is under development as a quadruped with a flexible, actuated spine designed to assist with foot movement and balance during these gaits. This paper presents the first set of hardware designs for the spine of Laika, a physical prototype of those designs, and tests in both hardware and simulations that show the prototype's capabilities. Laika's spine is a tensegrity structure, used for its advantages with weight and force distribution, and represents the first working prototype of a tensegrity spine for a quadruped robot. The spine bends by adjusting the lengths of the cables that separate its vertebrae, and twists using an actuated rotating vertebra at its center. The current prototype of Laika has stiff legs attached to the spine, and is used as a test setup for evaluation of the spine itself. This work shows the advantages of Laika's spine by demonstrating the spine lifting each of the robot's four feet, both as a form of balancing and as a precursor for a walking gait. These foot motions, using specific combinations of bending and rotation movements of the spine, are measured in both simulation and hardware experiments. Hardware data are used to calibrate the simulations, such that the simulations can be used for control of balancing or gait cycles in the future. Future work will attach actuated legs to Laika's spine, and examine balancing and gait cycles when combined with leg movements.