 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDARLA: Improving Zero-Shot Transfer in Reinforcement Learning
Jun 06, 2018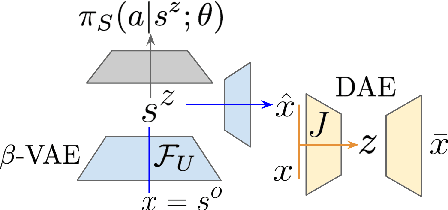
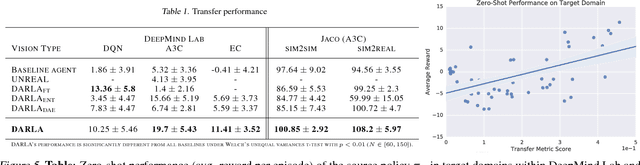
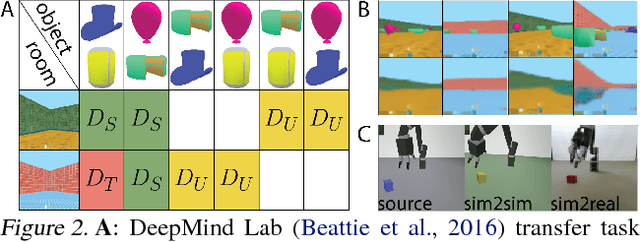
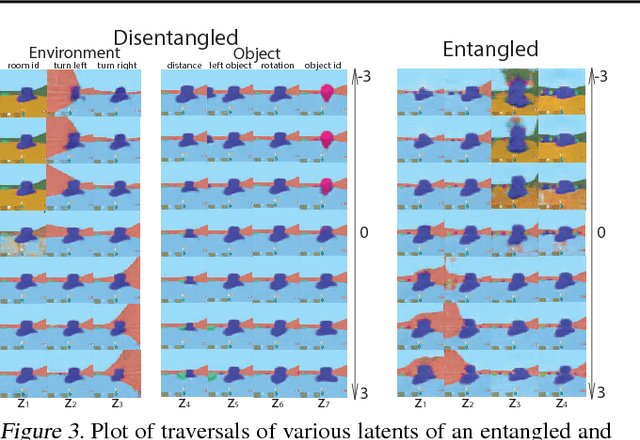
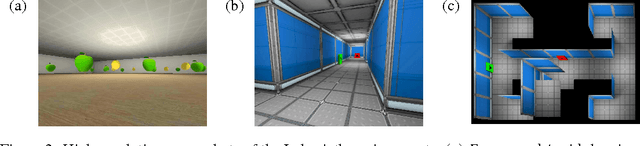
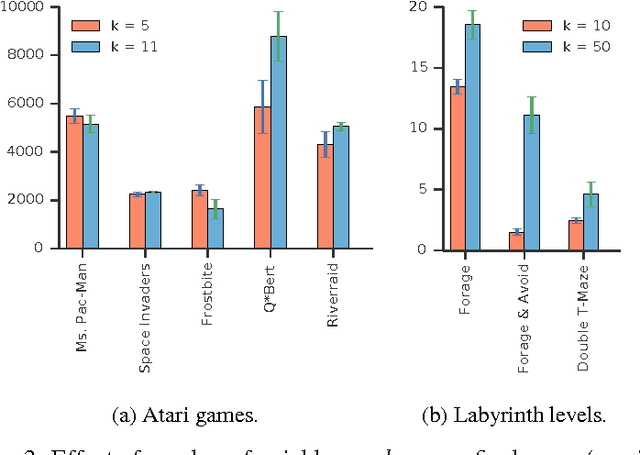
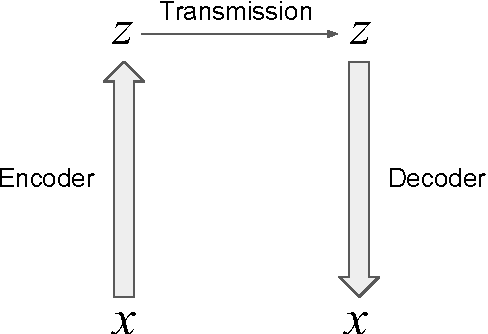
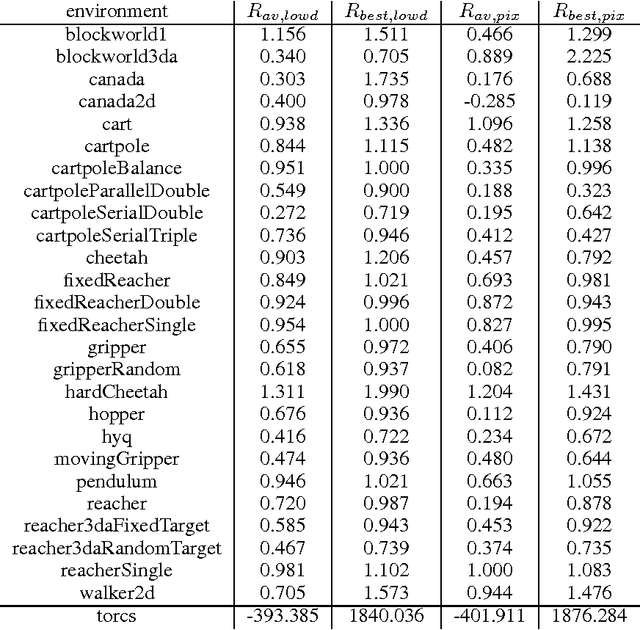
Domain adaptation is an important open problem in deep reinforcement learning (RL). In many scenarios of interest data is hard to obtain, so agents may learn a source policy in a setting where data is readily available, with the hope that it generalises well to the target domain. We propose a new multi-stage RL agent, DARLA (DisentAngled Representation Learning Agent), which learns to see before learning to act. DARLA's vision is based on learning a disentangled representation of the observed environment. Once DARLA can see, it is able to acquire source policies that are robust to many domain shifts - even with no access to the target domain. DARLA significantly outperforms conventional baselines in zero-shot domain adaptation scenarios, an effect that holds across a variety of RL environments (Jaco arm, DeepMind Lab) and base RL algorithms (DQN, A3C and EC).
Memory-based Parameter Adaptation
Feb 28, 2018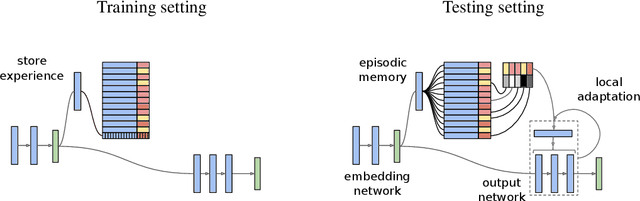
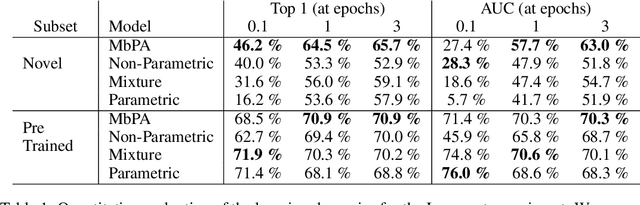
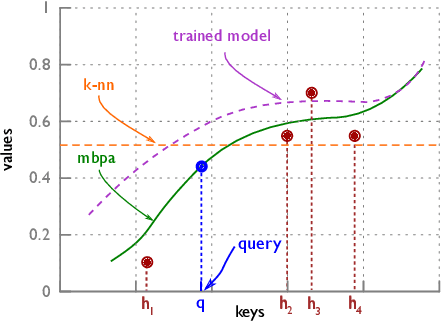
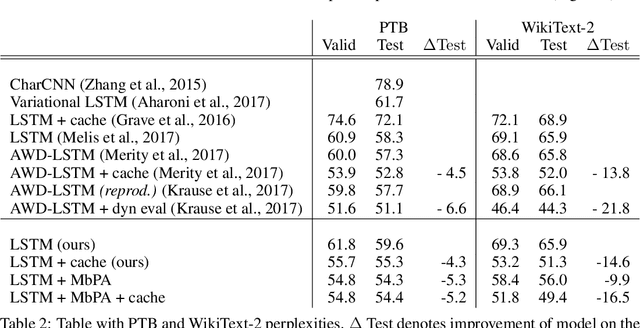
Deep neural networks have excelled on a wide range of problems, from vision to language and game playing. Neural networks very gradually incorporate information into weights as they process data, requiring very low learning rates. If the training distribution shifts, the network is slow to adapt, and when it does adapt, it typically performs badly on the training distribution before the shift. Our method, Memory-based Parameter Adaptation, stores examples in memory and then uses a context-based lookup to directly modify the weights of a neural network. Much higher learning rates can be used for this local adaptation, reneging the need for many iterations over similar data before good predictions can be made. As our method is memory-based, it alleviates several shortcomings of neural networks, such as catastrophic forgetting, fast, stable acquisition of new knowledge, learning with an imbalanced class labels, and fast learning during evaluation. We demonstrate this on a range of supervised tasks: large-scale image classification and language modelling.
Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles
Nov 04, 2017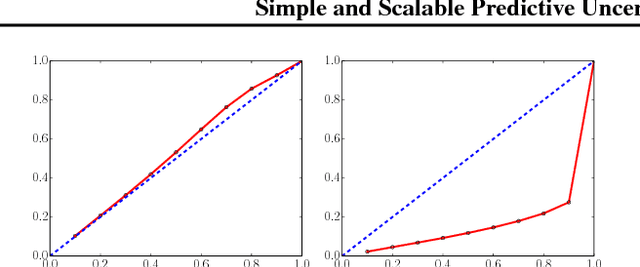
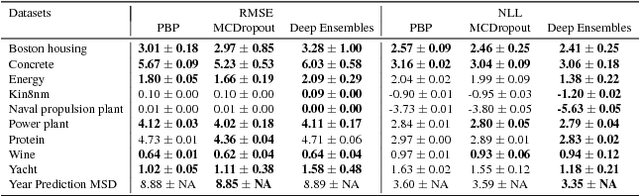

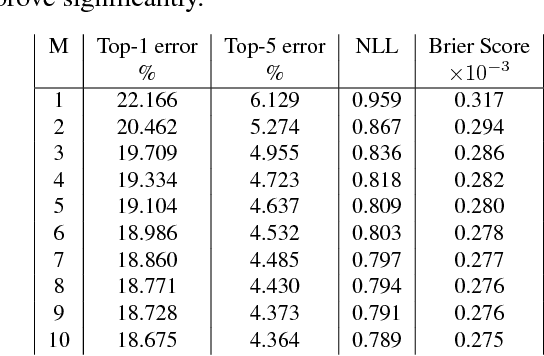
Deep neural networks (NNs) are powerful black box predictors that have recently achieved impressive performance on a wide spectrum of tasks. Quantifying predictive uncertainty in NNs is a challenging and yet unsolved problem. Bayesian NNs, which learn a distribution over weights, are currently the state-of-the-art for estimating predictive uncertainty; however these require significant modifications to the training procedure and are computationally expensive compared to standard (non-Bayesian) NNs. We propose an alternative to Bayesian NNs that is simple to implement, readily parallelizable, requires very little hyperparameter tuning, and yields high quality predictive uncertainty estimates. Through a series of experiments on classification and regression benchmarks, we demonstrate that our method produces well-calibrated uncertainty estimates which are as good or better than approximate Bayesian NNs. To assess robustness to dataset shift, we evaluate the predictive uncertainty on test examples from known and unknown distributions, and show that our method is able to express higher uncertainty on out-of-distribution examples. We demonstrate the scalability of our method by evaluating predictive uncertainty estimates on ImageNet.
Neural Episodic Control
Mar 06, 2017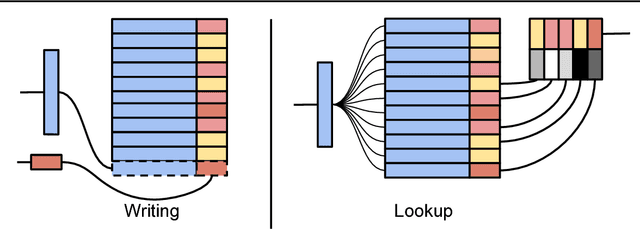
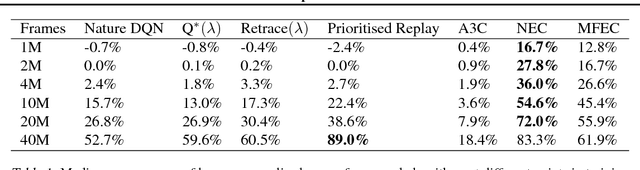
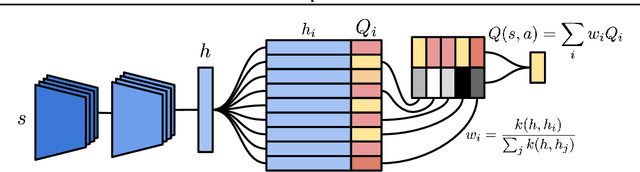
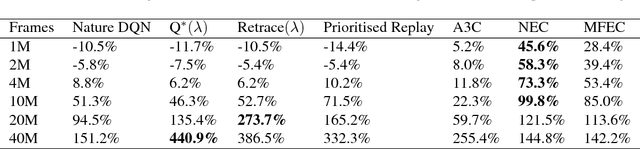
Deep reinforcement learning methods attain super-human performance in a wide range of environments. Such methods are grossly inefficient, often taking orders of magnitudes more data than humans to achieve reasonable performance. We propose Neural Episodic Control: a deep reinforcement learning agent that is able to rapidly assimilate new experiences and act upon them. Our agent uses a semi-tabular representation of the value function: a buffer of past experience containing slowly changing state representations and rapidly updated estimates of the value function. We show across a wide range of environments that our agent learns significantly faster than other state-of-the-art, general purpose deep reinforcement learning agents.
PathNet: Evolution Channels Gradient Descent in Super Neural Networks
Jan 30, 2017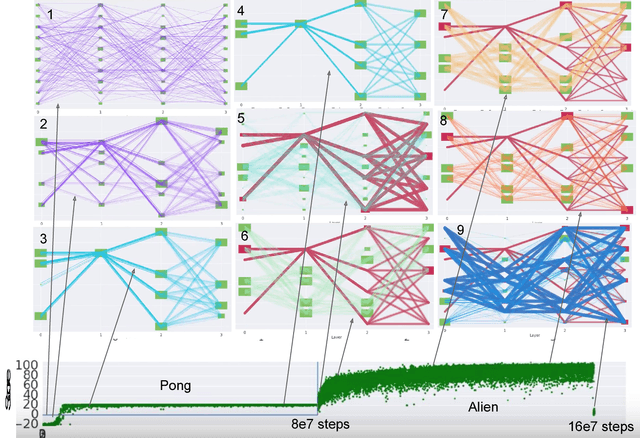
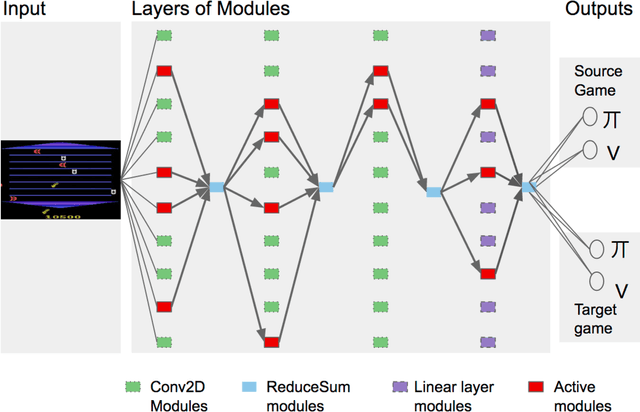
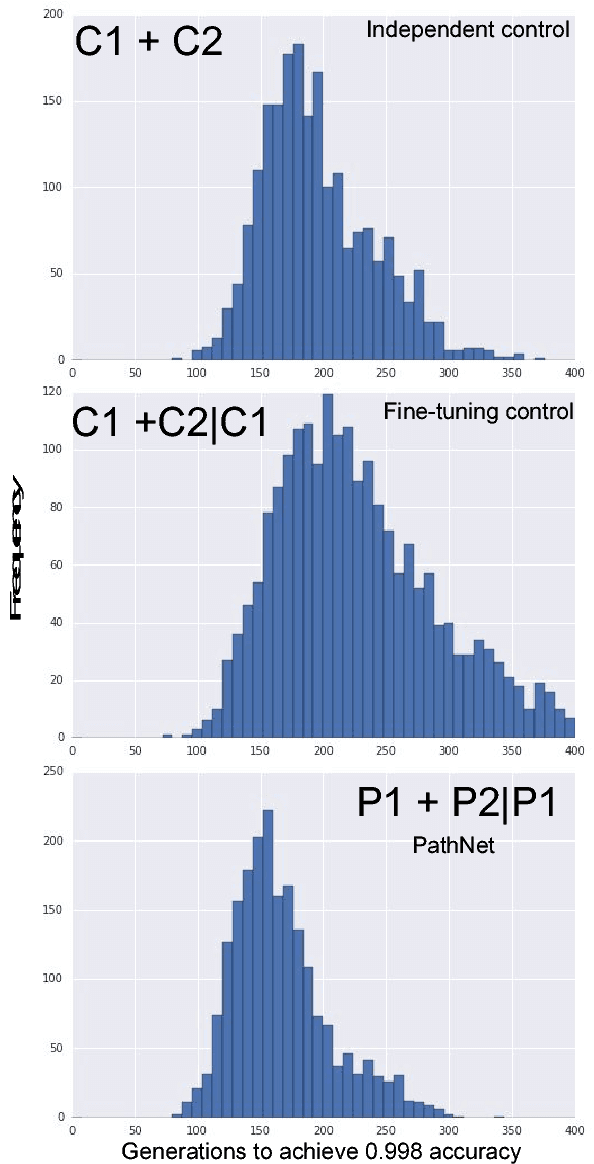
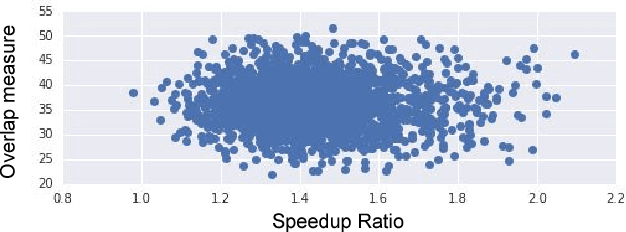
For artificial general intelligence (AGI) it would be efficient if multiple users trained the same giant neural network, permitting parameter reuse, without catastrophic forgetting. PathNet is a first step in this direction. It is a neural network algorithm that uses agents embedded in the neural network whose task is to discover which parts of the network to re-use for new tasks. Agents are pathways (views) through the network which determine the subset of parameters that are used and updated by the forwards and backwards passes of the backpropogation algorithm. During learning, a tournament selection genetic algorithm is used to select pathways through the neural network for replication and mutation. Pathway fitness is the performance of that pathway measured according to a cost function. We demonstrate successful transfer learning; fixing the parameters along a path learned on task A and re-evolving a new population of paths for task B, allows task B to be learned faster than it could be learned from scratch or after fine-tuning. Paths evolved on task B re-use parts of the optimal path evolved on task A. Positive transfer was demonstrated for binary MNIST, CIFAR, and SVHN supervised learning classification tasks, and a set of Atari and Labyrinth reinforcement learning tasks, suggesting PathNets have general applicability for neural network training. Finally, PathNet also significantly improves the robustness to hyperparameter choices of a parallel asynchronous reinforcement learning algorithm (A3C).
Deep Exploration via Bootstrapped DQN
Jul 04, 2016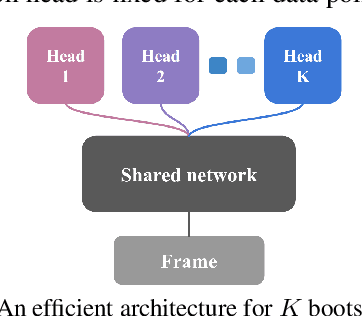
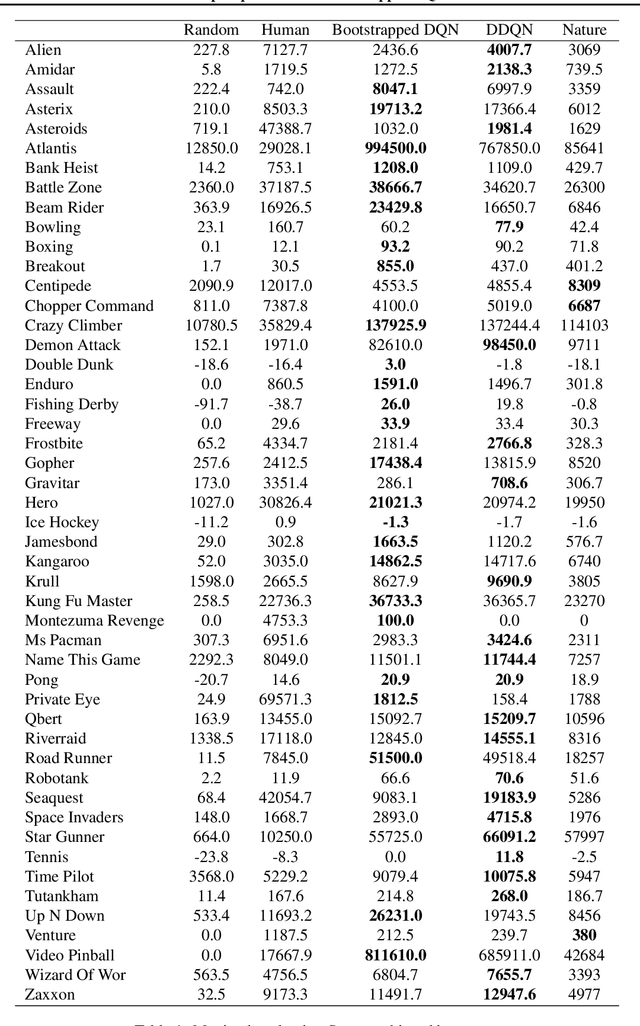
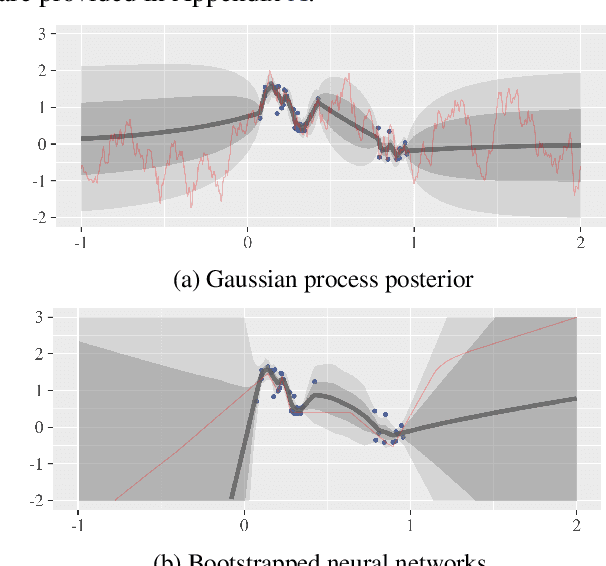
Efficient exploration in complex environments remains a major challenge for reinforcement learning. We propose bootstrapped DQN, a simple algorithm that explores in a computationally and statistically efficient manner through use of randomized value functions. Unlike dithering strategies such as epsilon-greedy exploration, bootstrapped DQN carries out temporally-extended (or deep) exploration; this can lead to exponentially faster learning. We demonstrate these benefits in complex stochastic MDPs and in the large-scale Arcade Learning Environment. Bootstrapped DQN substantially improves learning times and performance across most Atari games.
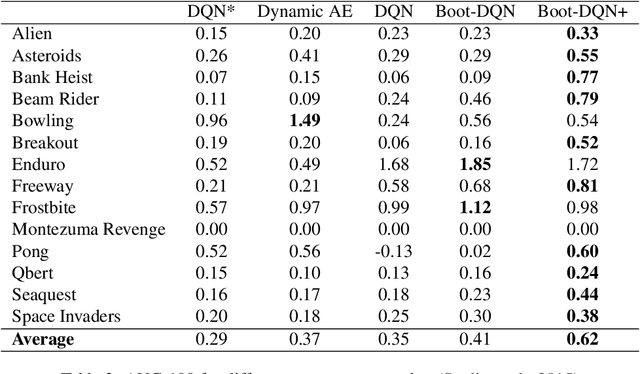
Model-Free Episodic Control
Jun 14, 2016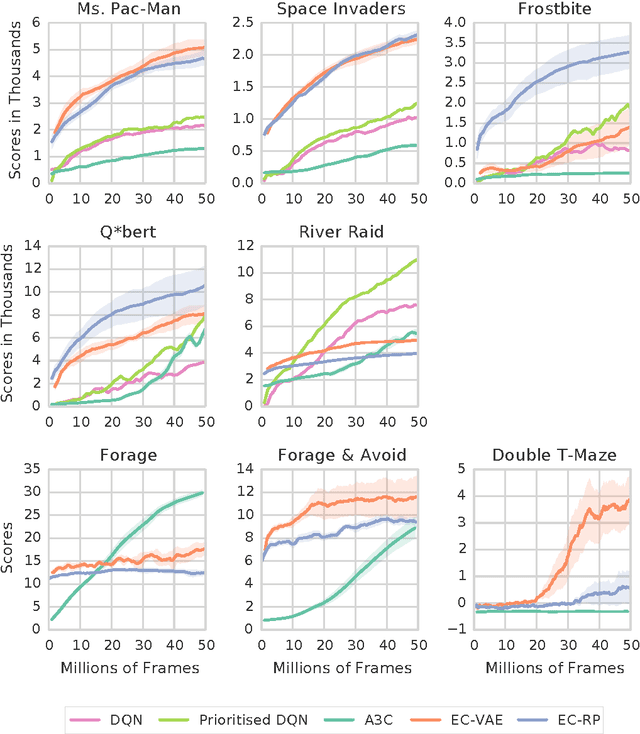
State of the art deep reinforcement learning algorithms take many millions of interactions to attain human-level performance. Humans, on the other hand, can very quickly exploit highly rewarding nuances of an environment upon first discovery. In the brain, such rapid learning is thought to depend on the hippocampus and its capacity for episodic memory. Here we investigate whether a simple model of hippocampal episodic control can learn to solve difficult sequential decision-making tasks. We demonstrate that it not only attains a highly rewarding strategy significantly faster than state-of-the-art deep reinforcement learning algorithms, but also achieves a higher overall reward on some of the more challenging domains.
Continuous control with deep reinforcement learning
Feb 29, 2016
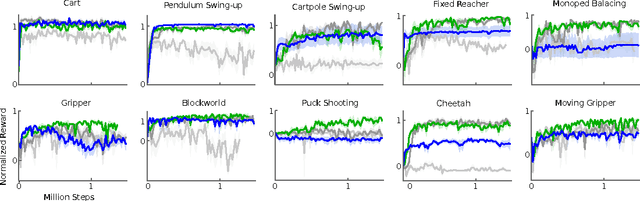
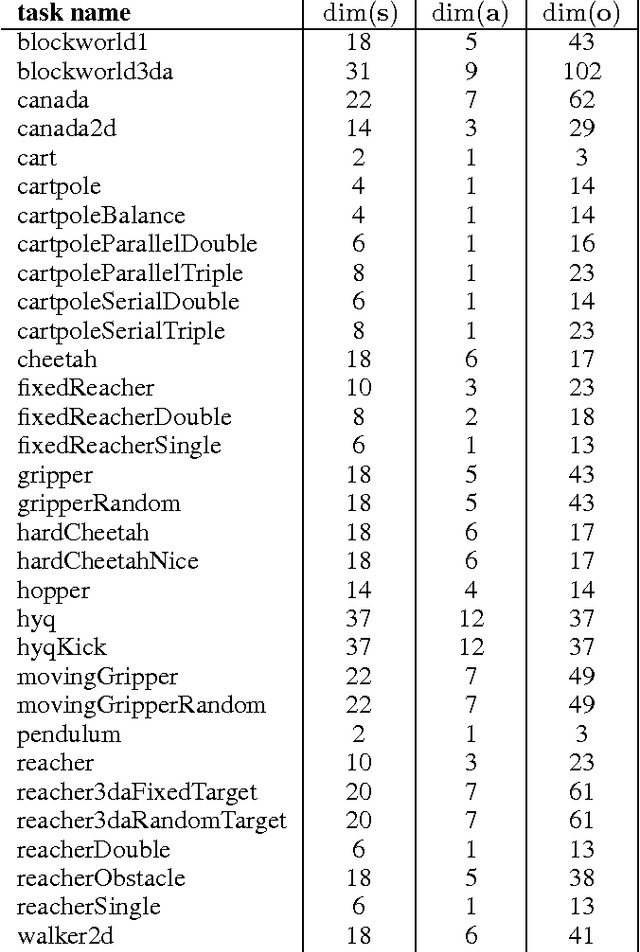
We adapt the ideas underlying the success of Deep Q-Learning to the continuous action domain. We present an actor-critic, model-free algorithm based on the deterministic policy gradient that can operate over continuous action spaces. Using the same learning algorithm, network architecture and hyper-parameters, our algorithm robustly solves more than 20 simulated physics tasks, including classic problems such as cartpole swing-up, dexterous manipulation, legged locomotion and car driving. Our algorithm is able to find policies whose performance is competitive with those found by a planning algorithm with full access to the dynamics of the domain and its derivatives. We further demonstrate that for many of the tasks the algorithm can learn policies end-to-end: directly from raw pixel inputs.