 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
U-Net with Graph Based Smoothing Regularizer for Small Vessel Segmentation on Fundus Image
Sep 16, 2020
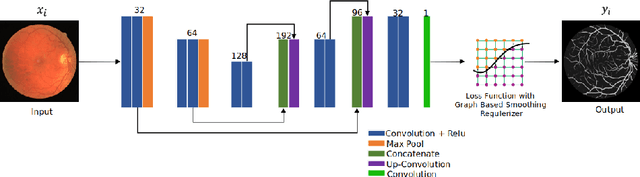
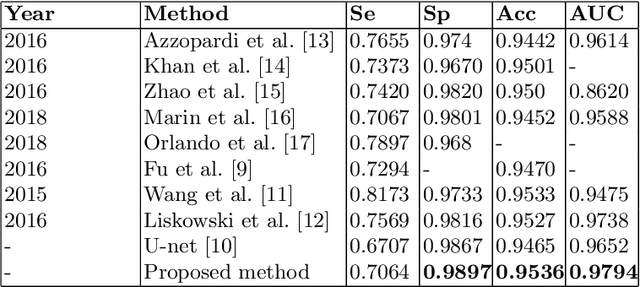
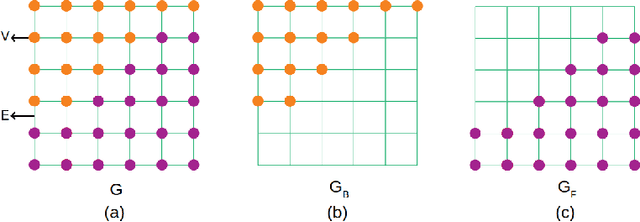
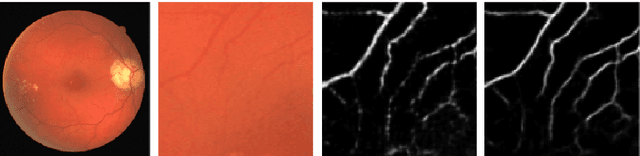
The detection of retinal blood vessels, especially the changes of small vessel condition is the most important indicator to identify the vascular network of the human body. Existing techniques focused mainly on shape of the large vessels, which is not appropriate for the disconnected small and isolated vessels. Paying attention to the low contrast small blood vessel in fundus region, first time we proposed to combine graph based smoothing regularizer with the loss function in the U-net framework. The proposed regularizer treated the image as two graphs by calculating the graph laplacians on vessel regions and the background regions on the image. The potential of the proposed graph based smoothing regularizer in reconstructing small vessel is compared over the classical U-net with or without regularizer. Numerical and visual results shows that our developed regularizer proved its effectiveness in segmenting the small vessels and reconnecting the fragmented retinal blood vessels.
Pose Refinement Graph Convolutional Network for Skeleton-based Action Recognition
Oct 14, 2020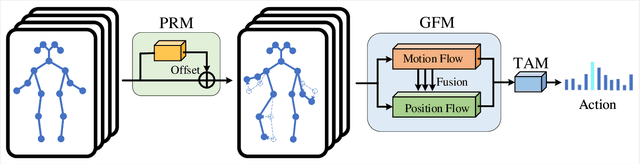
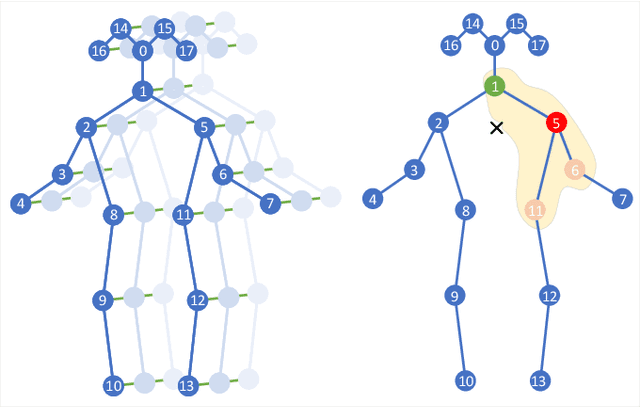
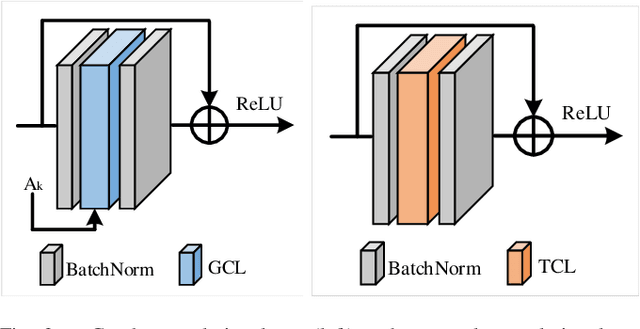
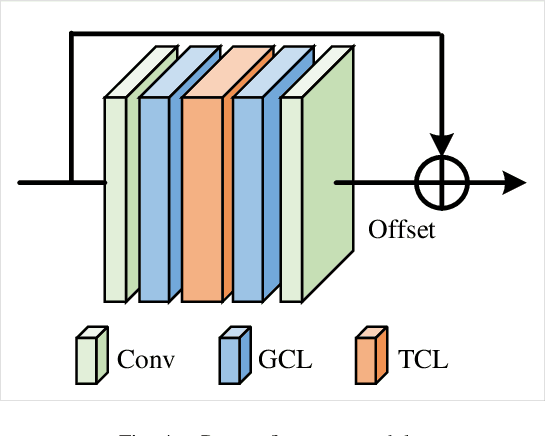
With the advances in capturing 2D or 3D skeleton data, skeleton-based action recognition has received an increasing interest over the last years. As skeleton data is commonly represented by graphs, graph convolutional networks have been proposed for this task. While current graph convolutional networks accurately recognize actions, they are too expensive for robotics applications where limited computational resources are available. In this paper, we therefore propose a highly efficient graph convolutional network that addresses the limitations of previous works. This is achieved by a parallel structure that gradually fuses motion and spatial information and by reducing the temporal resolution as early as possible. Furthermore, we explicitly address the issue that human poses can contain errors. To this end, the network first refines the poses before they are further processed to recognize the action. We therefore call the network Pose Refinement Graph Convolutional Network. Compared to other graph convolutional networks, our network requires 86\%-93\% less parameters and reduces the floating point operations by 89%-96% while achieving a comparable accuracy. It therefore provides a much better trade-off between accuracy, memory footprint and processing time, which makes it suitable for robotics applications.
A Provably Efficient Sample Collection Strategy for Reinforcement Learning
Jul 13, 2020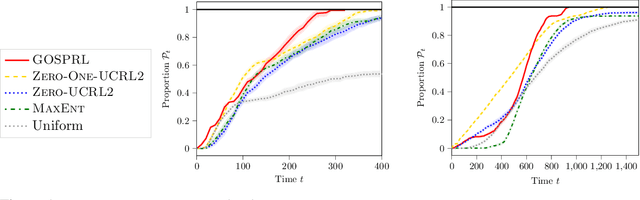
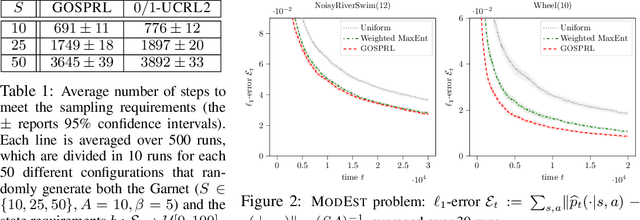
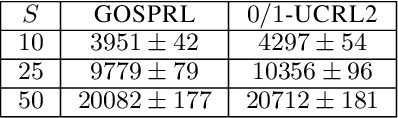
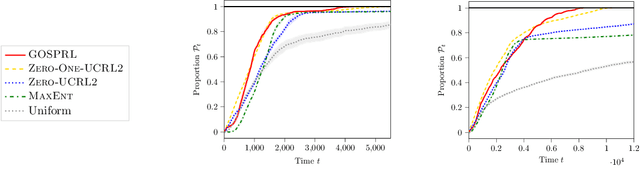
A common assumption in reinforcement learning (RL) is to have access to a generative model (i.e., a simulator of the environment), which allows to generate samples from any desired state-action pair. Nonetheless, in many settings a generative model may not be available and an adaptive exploration strategy is needed to efficiently collect samples from an unknown environment by direct interaction. In this paper, we study the scenario where an algorithm based on the generative model assumption defines the (possibly time-varying) amount of samples $b(s,a)$ required at each state-action pair $(s,a)$ and an exploration strategy has to learn how to generate $b(s,a)$ samples as fast as possible. Building on recent results for regret minimization in the stochastic shortest path (SSP) setting (Cohen et al., 2020; Tarbouriech et al., 2020), we derive an algorithm that requires $\tilde{O}( B D + D^{3/2} S^2 A)$ time steps to collect the $B = \sum_{s,a} b(s,a)$ desired samples, in any unknown and communicating MDP with $S$ states, $A$ actions and diameter $D$. Leveraging the generality of our strategy, we readily apply it to a variety of existing settings (e.g., model estimation, pure exploration in MDPs) for which we obtain improved sample-complexity guarantees, and to a set of new problems such as best-state identification and sparse reward discovery.
An ontology-based chatbot for crises management: use case coronavirus
Nov 02, 2020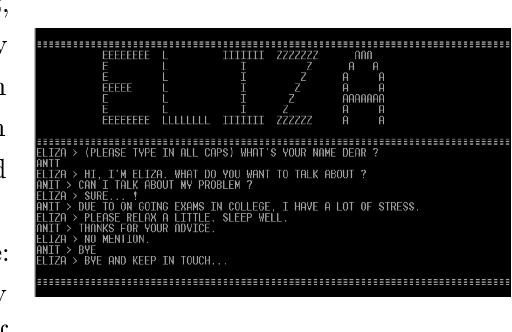
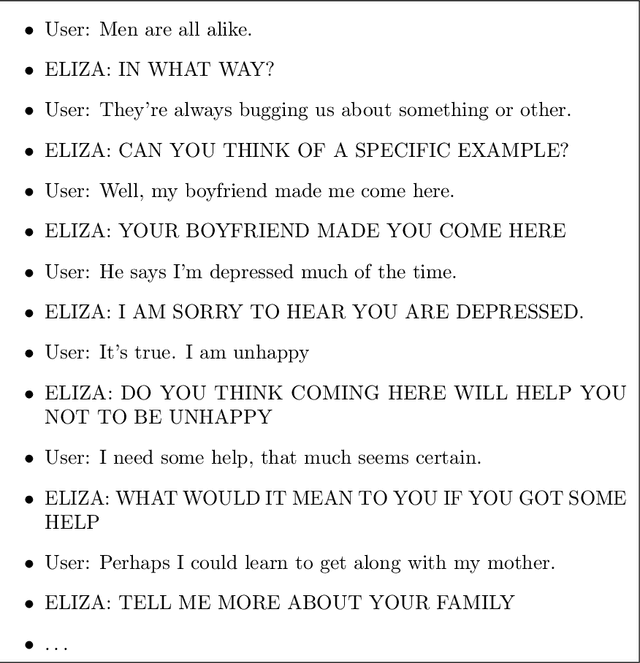
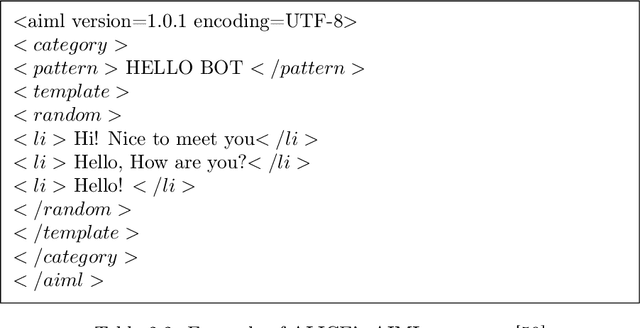
Today is the era of intelligence in machines. With the advances in Artificial Intelligence, machines have started to impersonate different human traits, a chatbot is the next big thing in the domain of conversational services. A chatbot is a virtual person who is capable to carry out a natural conversation with people. They can include skills that enable them to converse with the humans in audio, visual, or textual formats. Artificial intelligence conversational entities, also called chatbots, conversational agents, or dialogue system, are an excellent example of such machines. Obtaining the right information at the right time and place is the key to effective disaster management. The term "disaster management" encompasses both natural and human-caused disasters. To assist citizens, our project is to create a COVID Assistant to provide the need of up to date information to be available 24 hours. With the growth in the World Wide Web, it is quite intelligible that users are interested in the swift and relatedly correct information for their hunt. A chatbot can be seen as a question-and-answer system in which experts provide knowledge to solicit users. This master thesis is dedicated to discuss COVID Assistant chatbot and explain each component in detail. The design of the proposed chatbot is introduced by its seven components: Ontology, Web Scraping module, DB, State Machine, keyword Extractor, Trained chatbot, and User Interface.
MATS: An Interpretable Trajectory Forecasting Representation for Planning and Control
Sep 16, 2020
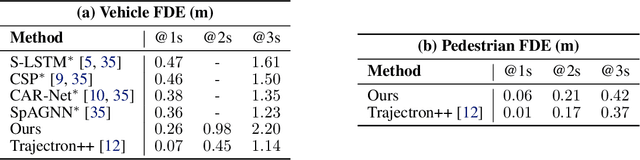
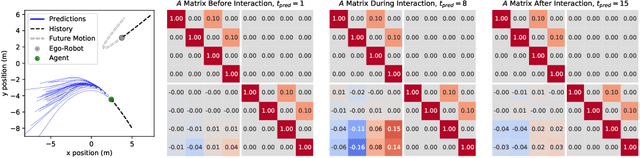

Reasoning about human motion is a core component of modern human-robot interactive systems. In particular, one of the main uses of behavior prediction in autonomous systems is to inform ego-robot motion planning and control. However, a majority of planning and control algorithms reason about system dynamics rather than the predicted agent tracklets that are commonly output by trajectory forecasting methods, which can hinder their integration. Towards this end, we propose Mixtures of Affine Time-varying Systems (MATS) as an output representation for trajectory forecasting that is more amenable to downstream planning and control use. Our approach leverages successful ideas from probabilistic trajectory forecasting works to learn dynamical system representations that are well-studied in the planning and control literature. We integrate our predictions with a proposed multimodal planning methodology and demonstrate significant computational efficiency improvements on a large-scale autonomous driving dataset.
Time-Critical Reasoning: Representations and Application
Feb 06, 2013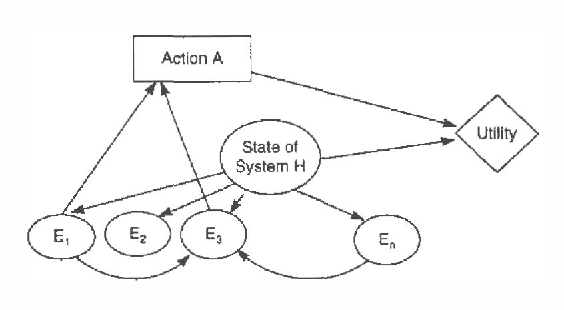
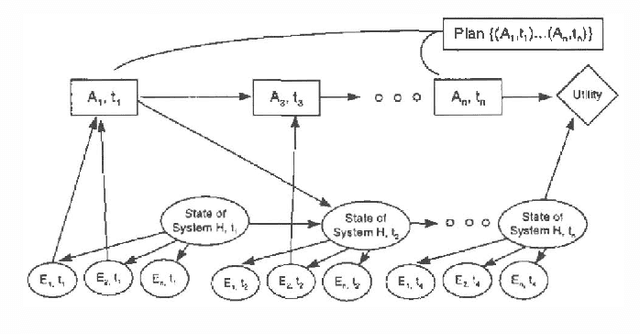
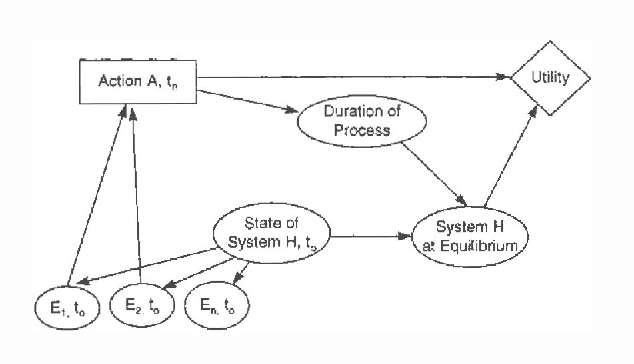
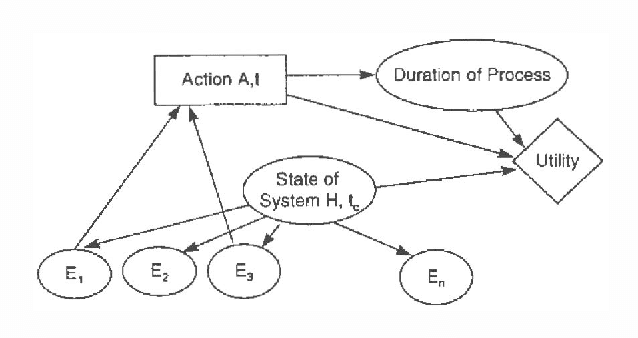
We review the problem of time-critical action and discuss a reformulation that shifts knowledge acquisition from the assessment of complex temporal probabilistic dependencies to the direct assessment of time-dependent utilities over key outcomes of interest. We dwell on a class of decision problems characterized by the centrality of diagnosing and reacting in a timely manner to pathological processes. We motivate key ideas in the context of trauma-care triage and transportation decisions.
ReadOnce Transformers: Reusable Representations of Text for Transformers
Oct 24, 2020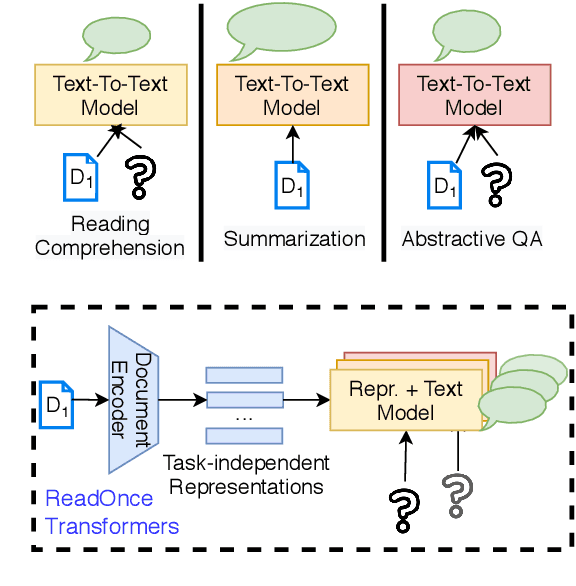
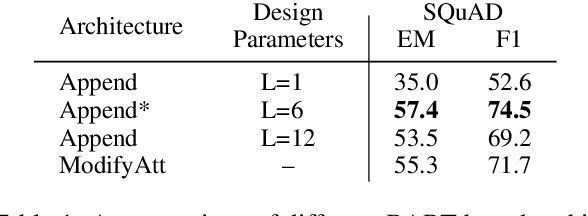
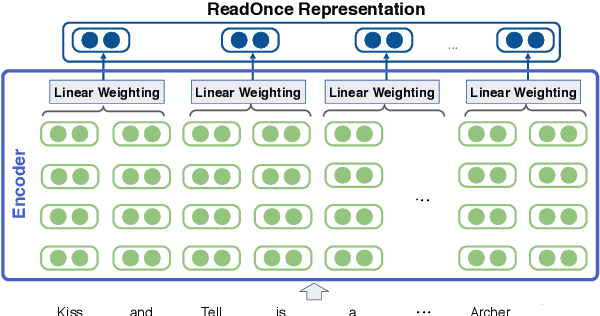
While large-scale language models are extremely effective when directly fine-tuned on many end-tasks, such models learn to extract information and solve the task simultaneously from end-task supervision. This is wasteful, as the general problem of gathering information from a document is mostly task-independent and need not be re-learned from scratch each time. Moreover, once the information has been captured in a computable representation, it can now be re-used across examples, leading to faster training and evaluation of models. We present a transformer-based approach, ReadOnce Transformers, that is trained to build such information-capturing representations of text. Our model compresses the document into a variable-length task-independent representation that can now be re-used in different examples and tasks, thereby requiring a document to only be read once. Additionally, we extend standard text-to-text models to consume our ReadOnce Representations along with text to solve multiple downstream tasks. We show our task-independent representations can be used for multi-hop QA, abstractive QA, and summarization. We observe 2x-5x speedups compared to standard text-to-text models, while also being able to handle long documents that would normally exceed the length limit of current models.
Computational tool to study high dimensional dynamic in NMM
Sep 16, 2020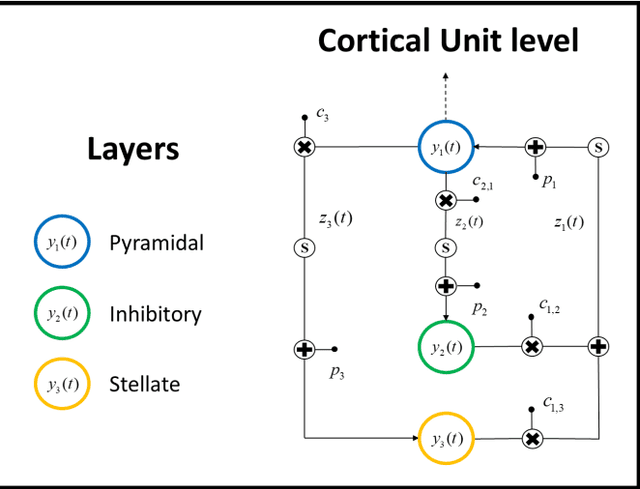
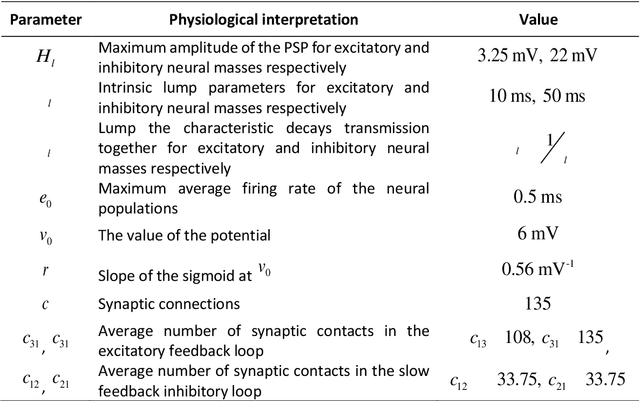
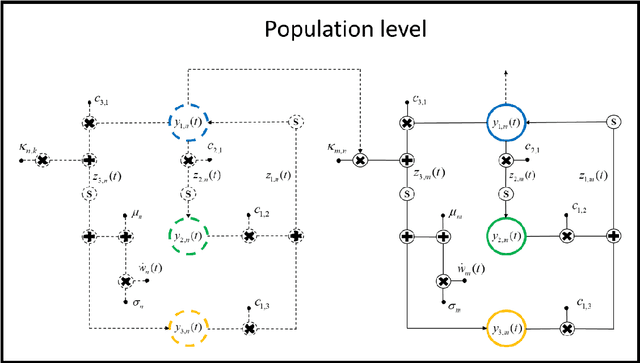
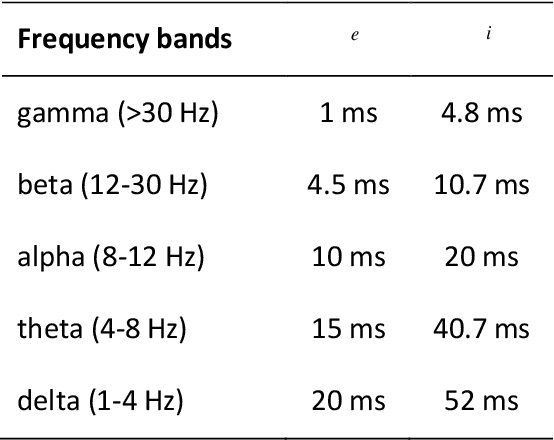
Neuroscience has shown great progress in recent years. Several of the theoretical bases have arisen from the examination of dynamic systems, using Neural Mass Models (NMMs). Due to the largescale brain dynamics of NMMs and the difficulty of studying nonlinear systems, the local linearization approach to discretize the state equation was used via an algebraic formulation, as it intervenes favorably in the speed and efficiency of numerical integration. To study the spacetime organization of the brain and generate more complex dynamics, three structural levels (cortical unit, population and system) were defined and assumed, in which the new assumed representation for conduction delays and new ways of connecting were defined. This is a new time-delay NMM, which can simulate several types of EEG activities since kinetics information was considered at three levels of complexity. Results obtained in this analysis provide additional theoretical foundations and indicate specific characteristics for understanding neurodynamic.
Proposed Efficient Design for Unmanned Surface Vehicles
Sep 02, 2020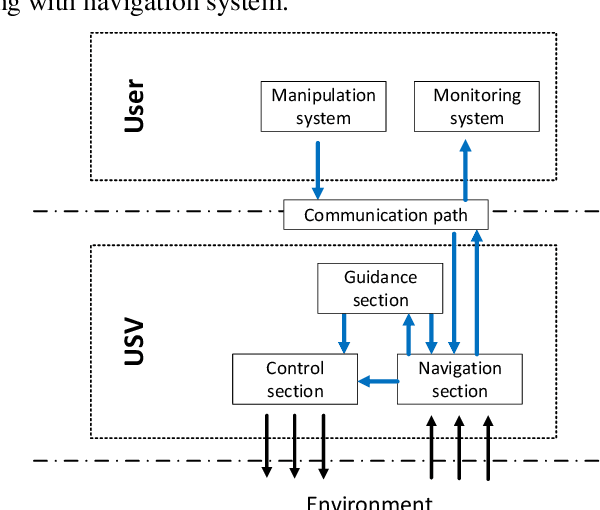
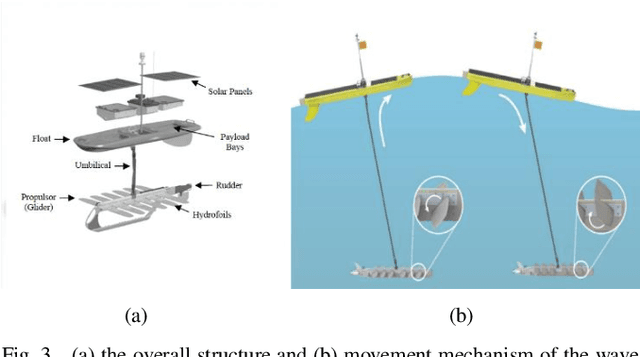
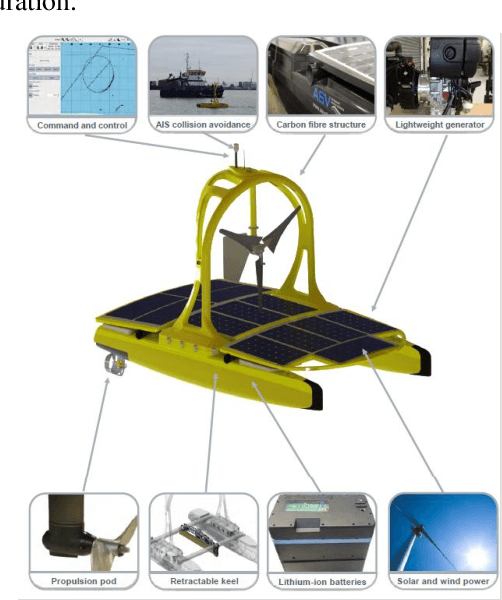
Recently worldwide interest is growing toward commercial, military or scientific Unmanned Surface Vehicle (USV) and hence there is required to develop their guidance, navigation, and control (GNC) systems. Real USVs are a relatively new advent, so the drawbacks of each model will be modified during the time. The proposition of an environmentally friendly as well as high efficient USV's design are the main purposes of this paper to guide future researches. Power management between renewable sources and storage units is considered. Furthermore, suitable and modern sensors are applied for state estimation and environmental perception. Technical requirements relate to guidance and control methods are provided to achieve the highest performance in the environment. Also, the hull structure and its material are important factors that are considered in this paper.
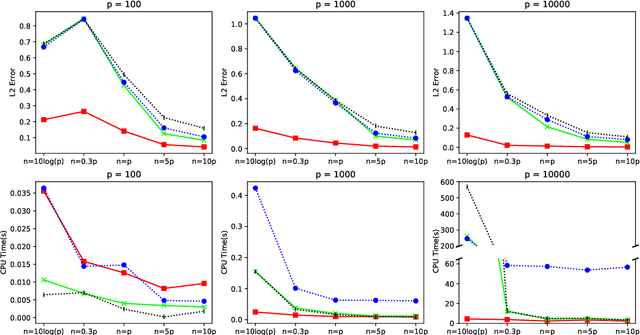
Non-Sparse PCA in High Dimensions via Cone Projected Power Iteration
May 15, 2020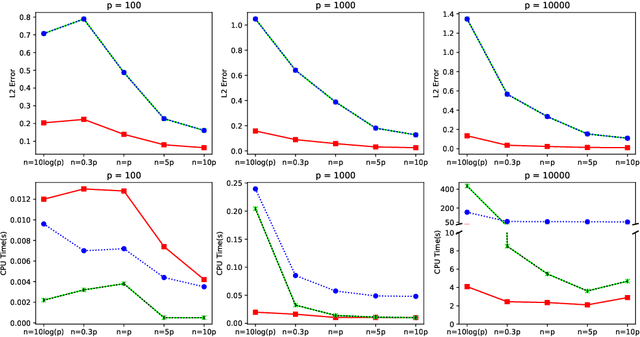

In this paper, we propose a cone projected power iteration algorithm to recover the principal eigenvector from a noisy positive semidefinite matrix. When the true principal eigenvector is assumed to belong to a convex cone, the proposed algorithm is fast and has a tractable error. Specifically, the method achieves polynomial time complexity for certain convex cones equipped with fast projection such as the monotone cone. It attains a small error when the noisy matrix has a small cone-restricted operator norm. We supplement the above results with a minimax lower bound of the error under the spiked covariance model. Our numerical experiments on simulated and real data, show that our method achieves shorter run time and smaller error in comparison to the ordinary power iteration and some sparse principal component analysis algorithms if the principal eigenvector is in a convex cone.