 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
AdaRNN: Adaptive Learning and Forecasting of Time Series
Aug 11, 2021
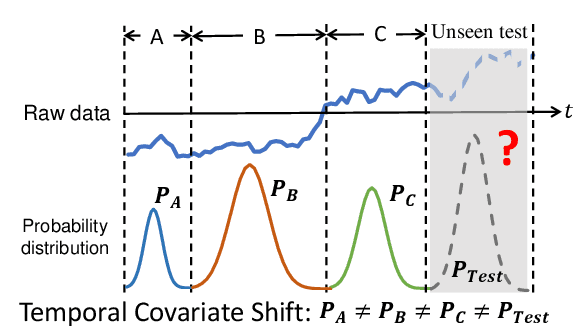
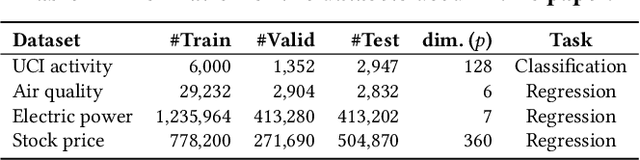
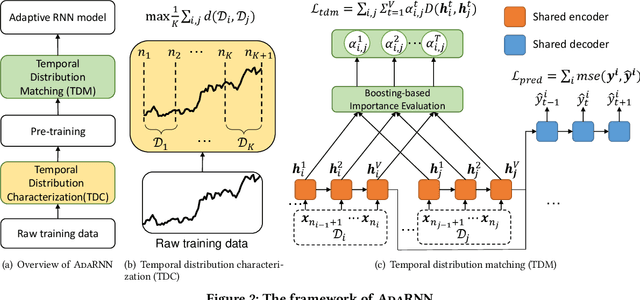
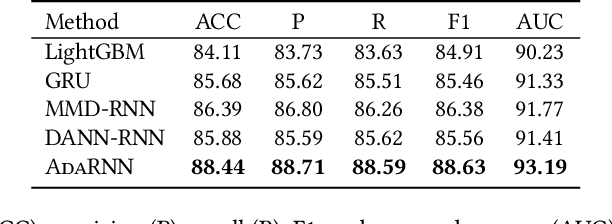
Time series has wide applications in the real world and is known to be difficult to forecast. Since its statistical properties change over time, its distribution also changes temporally, which will cause severe distribution shift problem to existing methods. However, it remains unexplored to model the time series in the distribution perspective. In this paper, we term this as Temporal Covariate Shift (TCS). This paper proposes Adaptive RNNs (AdaRNN) to tackle the TCS problem by building an adaptive model that generalizes well on the unseen test data. AdaRNN is sequentially composed of two novel algorithms. First, we propose Temporal Distribution Characterization to better characterize the distribution information in the TS. Second, we propose Temporal Distribution Matching to reduce the distribution mismatch in TS to learn the adaptive TS model. AdaRNN is a general framework with flexible distribution distances integrated. Experiments on human activity recognition, air quality prediction, and financial analysis show that AdaRNN outperforms the latest methods by a classification accuracy of 2.6% and significantly reduces the RMSE by 9.0%. We also show that the temporal distribution matching algorithm can be extended in Transformer structure to boost its performance.
Beyond Parallel Pancakes: Quasi-Polynomial Time Guarantees for Non-Spherical Gaussian Mixtures
Dec 10, 2021We consider mixtures of $k\geq 2$ Gaussian components with unknown means and unknown covariance (identical for all components) that are well-separated, i.e., distinct components have statistical overlap at most $k^{-C}$ for a large enough constant $C\ge 1$. Previous statistical-query lower bounds [DKS17] give formal evidence that even distinguishing such mixtures from (pure) Gaussians may be exponentially hard (in $k$). We show that this kind of hardness can only appear if mixing weights are allowed to be exponentially small, and that for polynomially lower bounded mixing weights non-trivial algorithmic guarantees are possible in quasi-polynomial time. Concretely, we develop an algorithm based on the sum-of-squares method with running time quasi-polynomial in the minimum mixing weight. The algorithm can reliably distinguish between a mixture of $k\ge 2$ well-separated Gaussian components and a (pure) Gaussian distribution. As a certificate, the algorithm computes a bipartition of the input sample that separates a pair of mixture components, i.e., both sides of the bipartition contain most of the sample points of at least one component. For the special case of colinear means, our algorithm outputs a $k$ clustering of the input sample that is approximately consistent with the components of the mixture. A significant challenge for our results is that they appear to be inherently sensitive to small fractions of adversarial outliers unlike most previous results for Gaussian mixtures. The reason is that such outliers can simulate exponentially small mixing weights even for mixtures with polynomially lower bounded mixing weights. A key technical ingredient is a characterization of separating directions for well-separated Gaussian components in terms of ratios of polynomials that correspond to moments of two carefully chosen orders logarithmic in the minimum mixing weight.
Joint Communications and Sensing Employing Optimized MIMO-OFDM Signals
Aug 21, 2022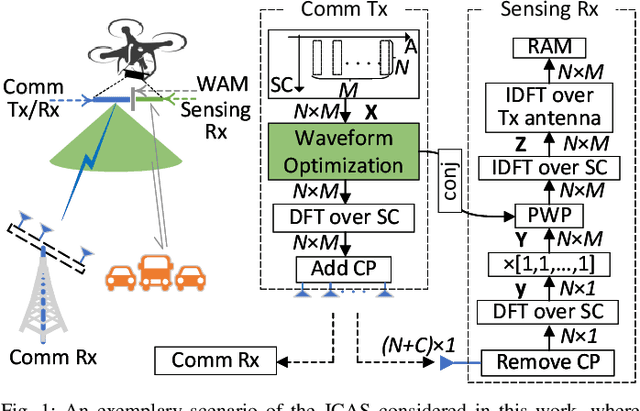
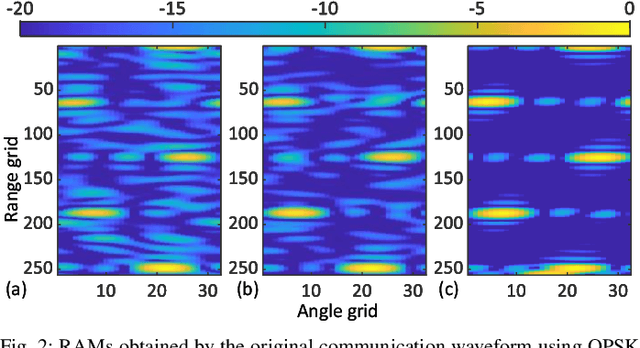
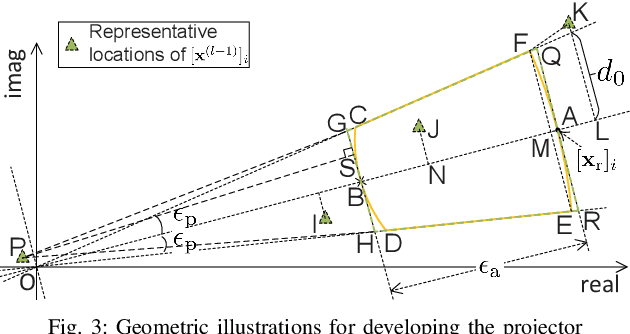
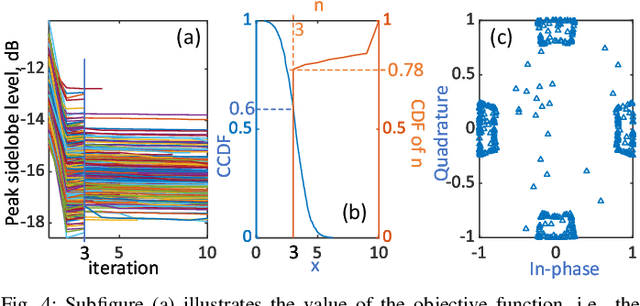
Joint communication and sensing (JCAS) has the potential to improve the overall energy, cost and frequency efficiency of IoT systems. As a first effort, we propose to optimize the MIMO-OFDM data symbols carried by sub-carriers for better time- and spatial-domain signal orthogonality. This not only boosts the availability of usable signals for JCAS, but also significantly facilitates Internet-of-Things (IoT) devices to perform high-quality sensing. We establish an optimization problem that modifies data symbols on sub-carriers to enhance the above-mentioned signal orthogonality. We also develop an efficient algorithm to solve the problem based on the majorization-minimization framework. Moreover, we discover unique signal structures and features from the newly modeled problem, which substantially reduce the complexity of majorizing the objective function. We also develop new projectors to enforce the feasibility of the obtained solution. Simulations show that, compared with the original communication waveform to achieve the same sensing performance, the optimized waveform can reduce the signal-to-noise ratio (SNR) requirement by 3~4.5 dB, while the SNR loss for the uncoded bit error rate is only 1~1.5 dB.
How Asynchronous Events Encode Video
Jun 09, 2022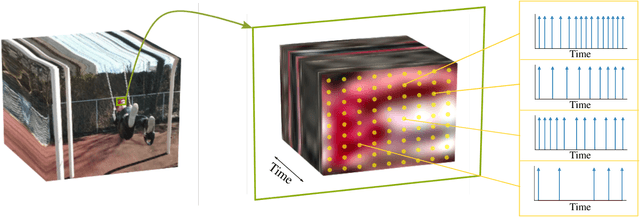
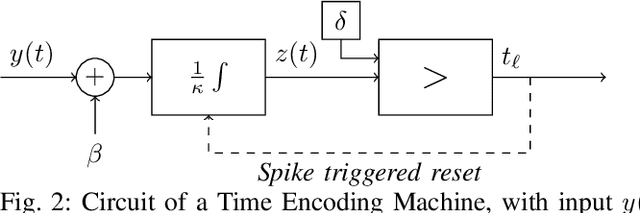
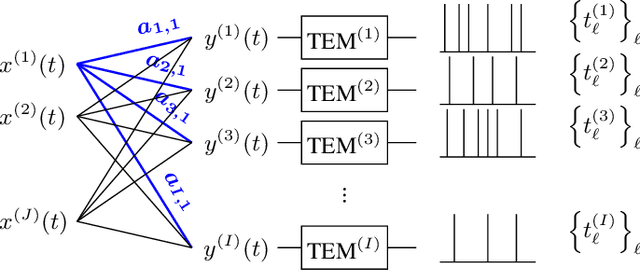
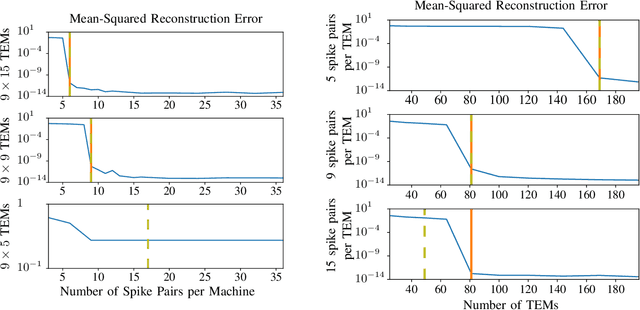
As event-based sensing gains in popularity, theoretical understanding is needed to harness this technology's potential. Instead of recording video by capturing frames, event-based cameras have sensors that emit events when their inputs change, thus encoding information in the timing of events. This creates new challenges in establishing reconstruction guarantees and algorithms, but also provides advantages over frame-based video. We use time encoding machines to model event-based sensors: TEMs also encode their inputs by emitting events characterized by their timing and reconstruction from time encodings is well understood. We consider the case of time encoding bandlimited video and demonstrate a dependence between spatial sensor density and overall spatial and temporal resolution. Such a dependence does not occur in frame-based video, where temporal resolution depends solely on the frame rate of the video and spatial resolution depends solely on the pixel grid. However, this dependence arises naturally in event-based video and allows oversampling in space to provide better time resolution. As such, event-based vision encourages using more sensors that emit fewer events over time.
* 6 pages, 4 figures
A New Radar Signal Multiparameter-Based Deinterleaving Method
Aug 21, 2022
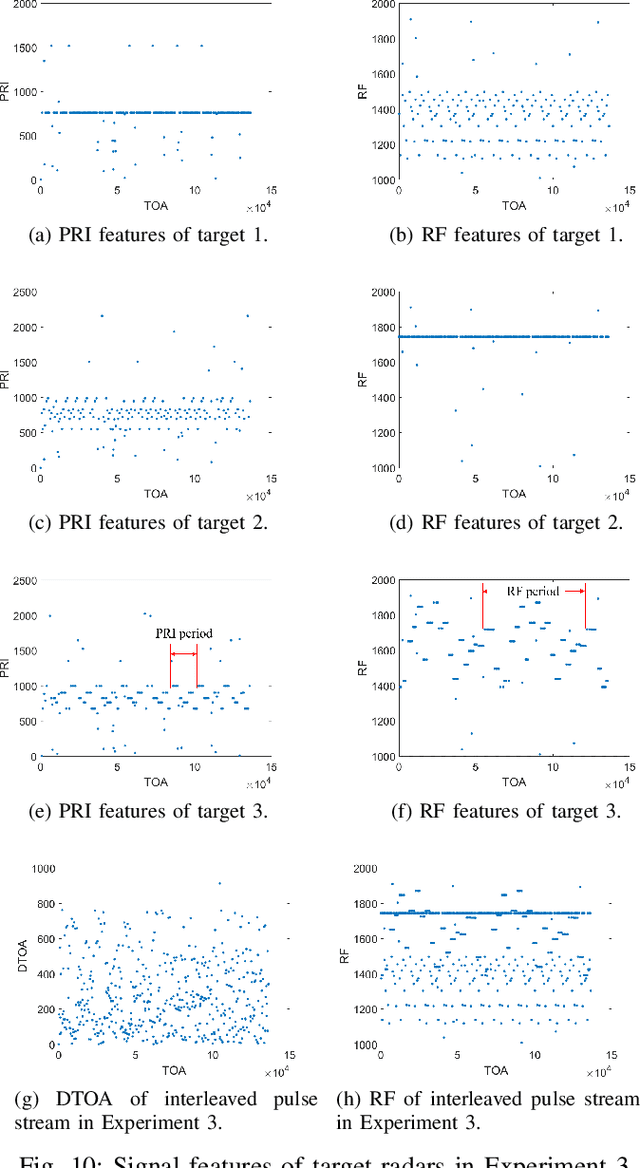
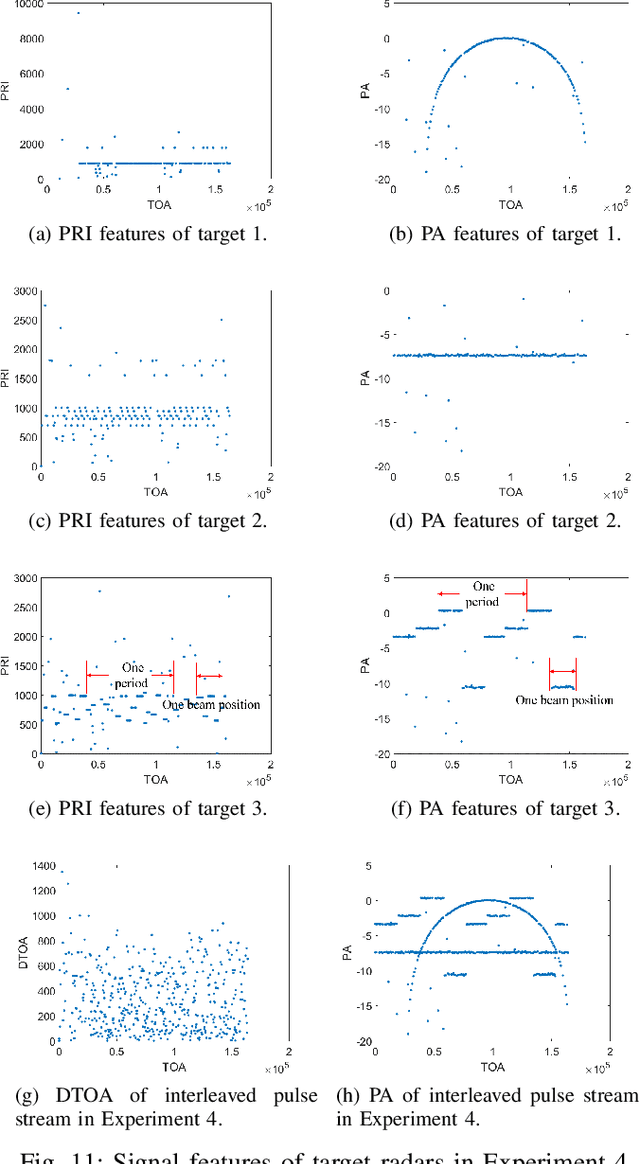
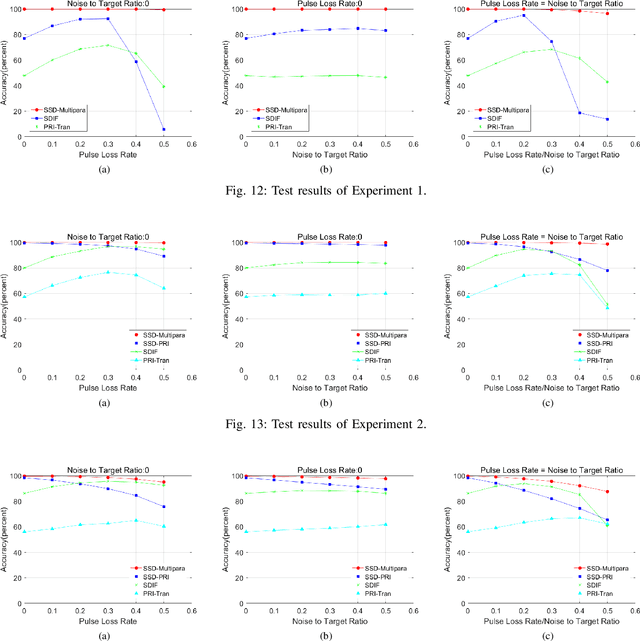
Radar signal deinterleaving has been extensively and thoroughly investigated in the electronic reconnaissance field. In this work, a new radar signal multiparameter-based deinterleaving method is proposed. In this method, semantic information composed of the pulse repetition interval (PRI), pulse width (PW), radio frequency (RF), and pulse amplitude (PA) of a radar signal is used to deinterleave radar signals. A bidirectional gated recurrent unit (BGRU) is employed, and the difference of time of arrival (DTOA)/RF, DTOA/PW, and DTOA/PA of the pulse stream are input into the BGRU. Based on the semantic information contained in different radar signal types, each pulse in the obtained pulse stream is classified according to the semantic information category, and the radar signals are deinterleaved. Compared to the PRI-based deinterleaving methods, the proposed method utilizes the multidimensional information of radar signals. As a result, higher deinterleaving accuracy is achieved. Compared to other existing radar signal multiparameter-based deinterleaving methods, the proposed method can adapt to radar signals with complex parameter features as well as to complex signal environments, and can complete the use of multiparameter in one step.
Why Deep Learning's Performance Data Are Misleading
Aug 23, 2022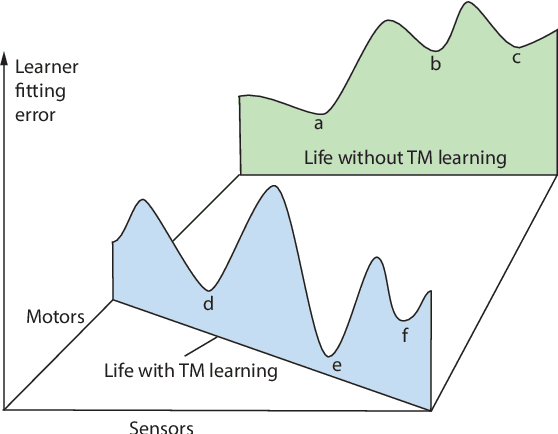
This is a theoretical paper, as a companion paper of the keynote talk at the same conference. In contrast to conscious learning, many projects in AI have employed deep learning many of which seem to give impressive performance data. This paper explains that such performance data are probably misleadingly inflated due to two possible misconducts: data deletion and test on training set. This paper clarifies what is data deletion in deep learning and what is test on training set in deep learning and why they are misconducts. A simple classification method is defined, called nearest neighbor with threshold (NNWT). A theorem is established that the NNWT method reaches a zero error on any validation set and any test set using Post-Selections, as long as the test set is in the possession of the author and both the amount of storage space and the time of training are finite but unbounded like with many deep learning methods. However, like many deep learning methods, the NNWT method has little generalization power. The evidence that misconducts actually took place in many deep learning projects is beyond the scope of this paper. Without a transparent account about freedom from Post-Selections, deep learning data are misleading.
TunaOil: A Tuning Algorithm Strategy for Reservoir Simulation Workloads
Aug 04, 2022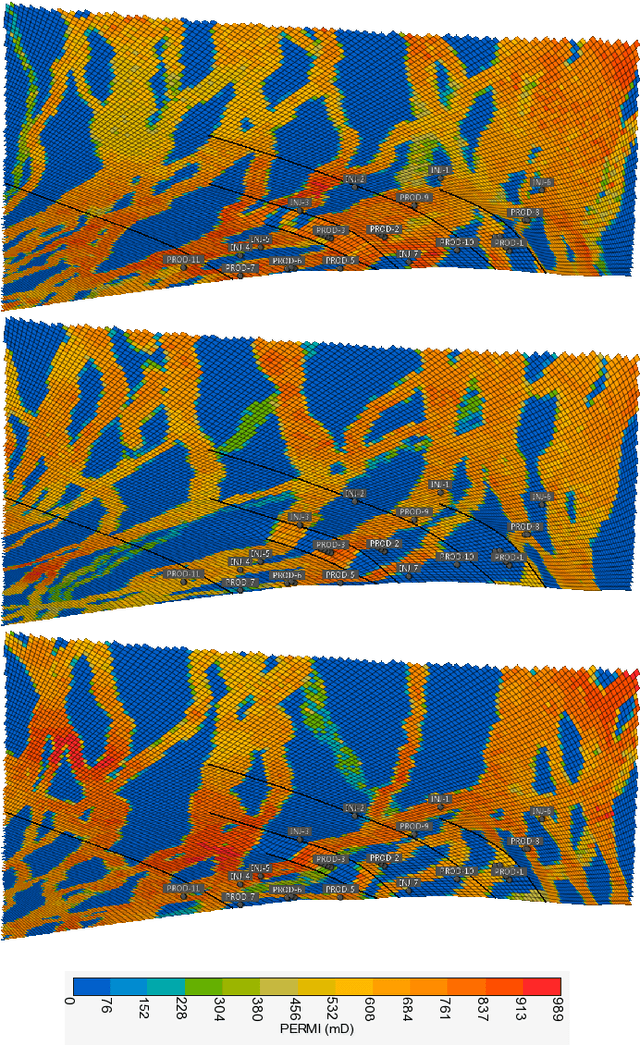
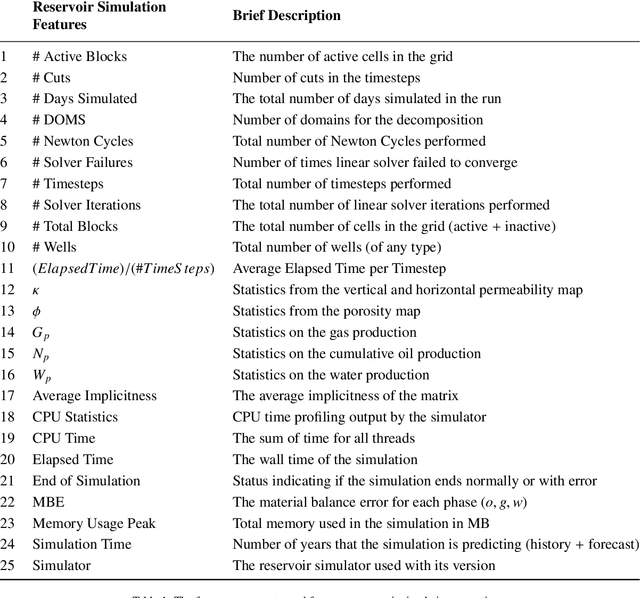
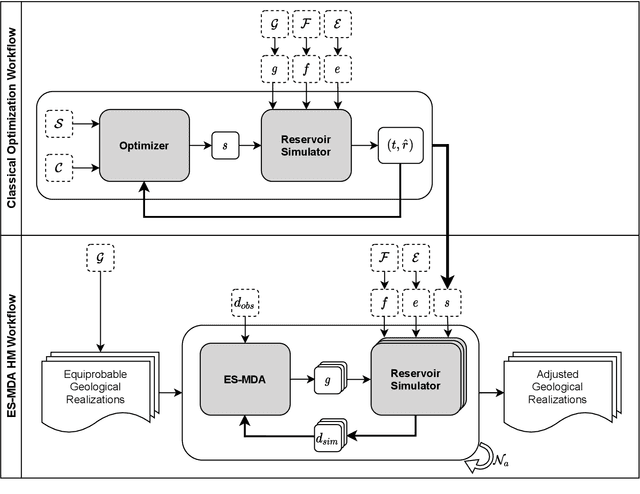
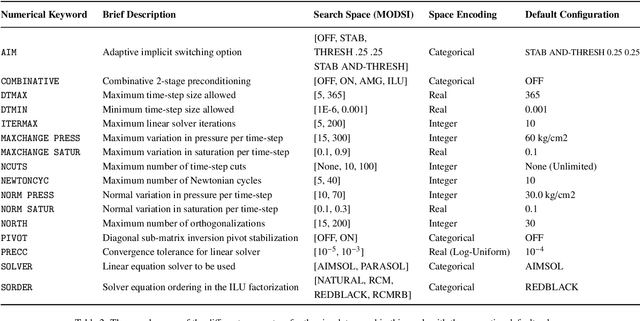
Reservoir simulations for petroleum fields and seismic imaging are known as the most demanding workloads for high-performance computing (HPC) in the oil and gas (O&G) industry. The optimization of the simulator numerical parameters plays a vital role as it could save considerable computational efforts. State-of-the-art optimization techniques are based on running numerous simulations, specific for that purpose, to find good parameter candidates. However, using such an approach is highly costly in terms of time and computing resources. This work presents TunaOil, a new methodology to enhance the search for optimal numerical parameters of reservoir flow simulations using a performance model. In the O&G industry, it is common to use ensembles of models in different workflows to reduce the uncertainty associated with forecasting O&G production. We leverage the runs of those ensembles in such workflows to extract information from each simulation and optimize the numerical parameters in their subsequent runs. To validate the methodology, we implemented it in a history matching (HM) process that uses a Kalman filter algorithm to adjust an ensemble of reservoir models to match the observed data from the real field. We mine past execution logs from many simulations with different numerical configurations and build a machine learning model based on extracted features from the data. These features include properties of the reservoir models themselves, such as the number of active cells, to statistics of the simulation's behavior, such as the number of iterations of the linear solver. A sampling technique is used to query the oracle to find the numerical parameters that can reduce the elapsed time without significantly impacting the quality of the results. Our experiments show that the predictions can improve the overall HM workflow runtime on average by 31%.
Evaluating Privacy-Preserving Machine Learning in Critical Infrastructures: A Case Study on Time-Series Classification
Nov 29, 2021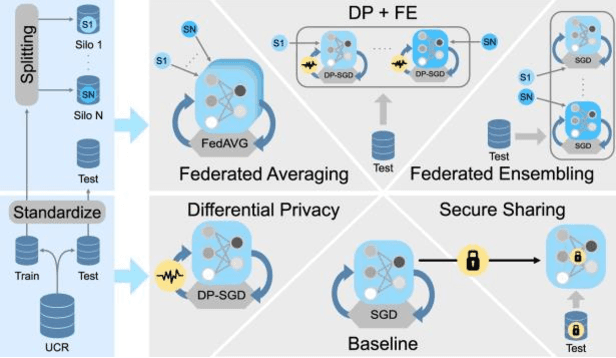
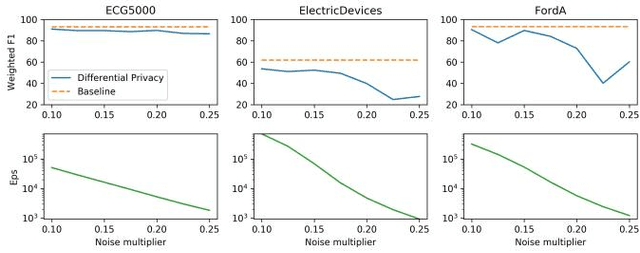
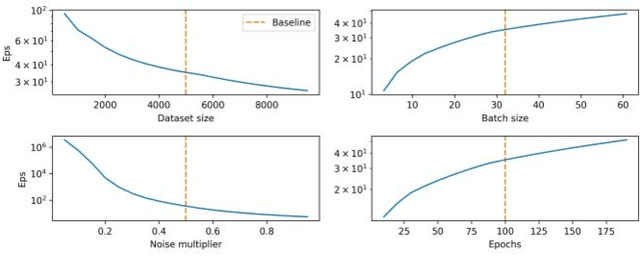
With the advent of machine learning in applications of critical infrastructure such as healthcare and energy, privacy is a growing concern in the minds of stakeholders. It is pivotal to ensure that neither the model nor the data can be used to extract sensitive information used by attackers against individuals or to harm whole societies through the exploitation of critical infrastructure. The applicability of machine learning in these domains is mostly limited due to a lack of trust regarding the transparency and the privacy constraints. Various safety-critical use cases (mostly relying on time-series data) are currently underrepresented in privacy-related considerations. By evaluating several privacy-preserving methods regarding their applicability on time-series data, we validated the inefficacy of encryption for deep learning, the strong dataset dependence of differential privacy, and the broad applicability of federated methods.
DPIT: Dual-Pipeline Integrated Transformer for Human Pose Estimation
Sep 02, 2022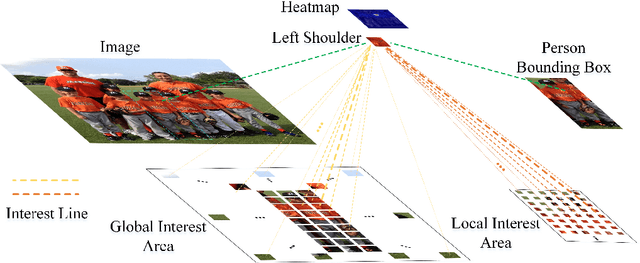
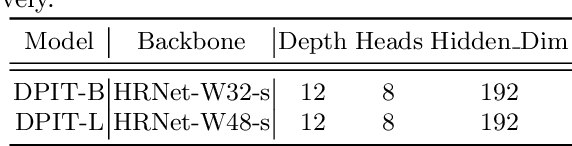
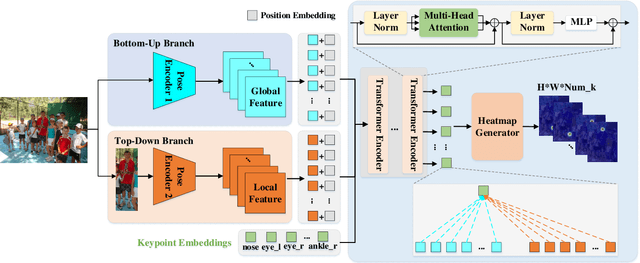
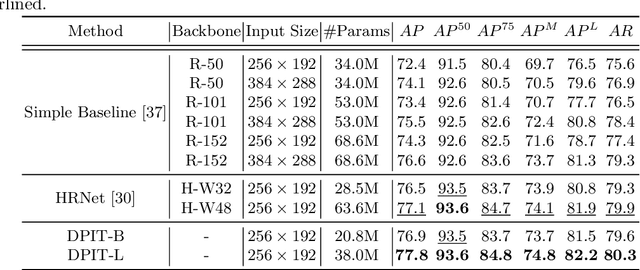
Human pose estimation aims to figure out the keypoints of all people in different scenes. Current approaches still face some challenges despite promising results. Existing top-down methods deal with a single person individually, without the interaction between different people and the scene they are situated in. Consequently, the performance of human detection degrades when serious occlusion happens. On the other hand, existing bottom-up methods consider all people at the same time and capture the global knowledge of the entire image. However, they are less accurate than the top-down methods due to the scale variation. To address these problems, we propose a novel Dual-Pipeline Integrated Transformer (DPIT) by integrating top-down and bottom-up pipelines to explore the visual clues of different receptive fields and achieve their complementarity. Specifically, DPIT consists of two branches, the bottom-up branch deals with the whole image to capture the global visual information, while the top-down branch extracts the feature representation of local vision from the single-human bounding box. Then, the extracted feature representations from bottom-up and top-down branches are fed into the transformer encoder to fuse the global and local knowledge interactively. Moreover, we define the keypoint queries to explore both full-scene and single-human posture visual clues to realize the mutual complementarity of the two pipelines. To the best of our knowledge, this is one of the first works to integrate the bottom-up and top-down pipelines with transformers for human pose estimation. Extensive experiments on COCO and MPII datasets demonstrate that our DPIT achieves comparable performance to the state-of-the-art methods.
DeepPicarMicro: Applying TinyML to Autonomous Cyber Physical Systems
Aug 23, 2022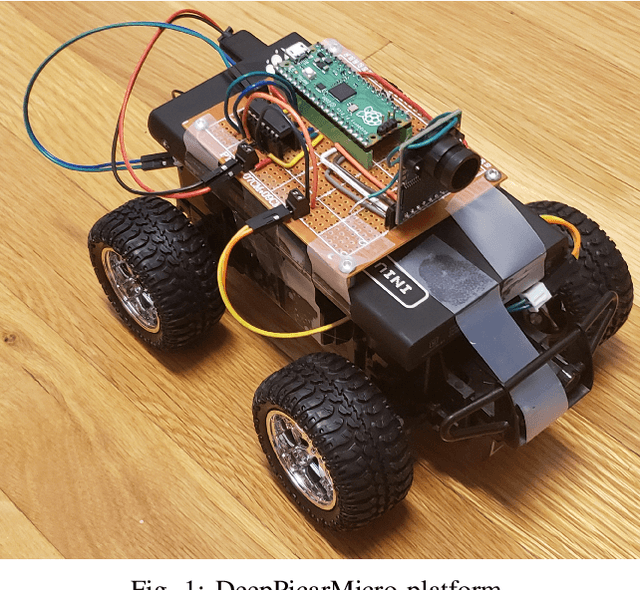
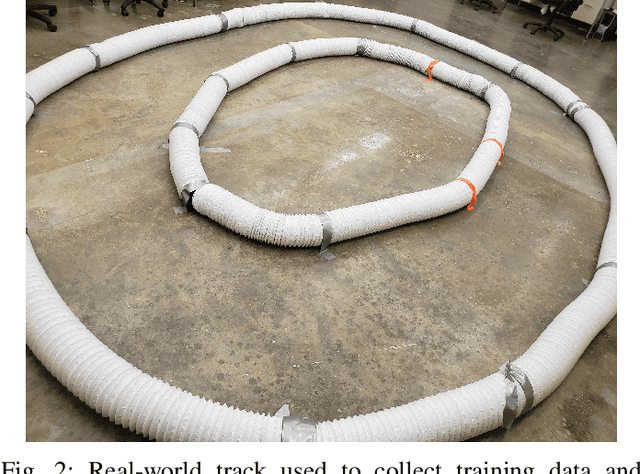
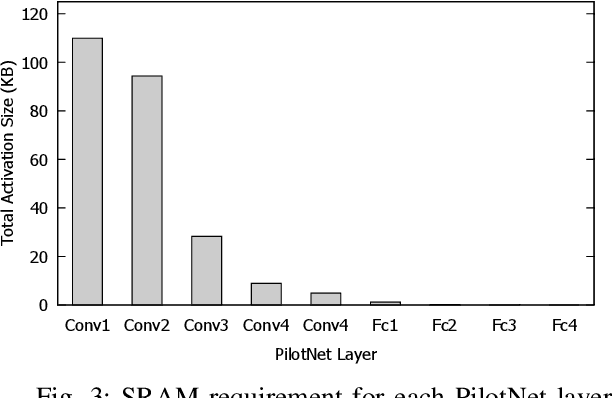
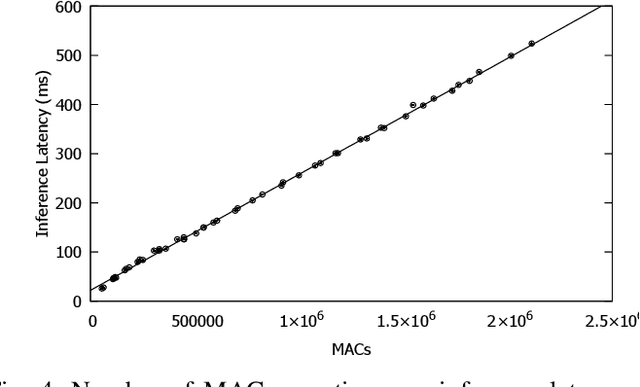
Running deep neural networks (DNNs) on tiny Micro-controller Units (MCUs) is challenging due to their limitations in computing, memory, and storage capacity. Fortunately, recent advances in both MCU hardware and machine learning software frameworks make it possible to run fairly complex neural networks on modern MCUs, resulting in a new field of study widely known as TinyML. However, there have been few studies to show the potential for TinyML applications in cyber physical systems (CPS). In this paper, we present DeepPicarMicro, a small self-driving RC car testbed, which runs a convolutional neural network (CNN) on a Raspberry Pi Pico MCU. We apply a state-of-the-art DNN optimization to successfully fit the well-known PilotNet CNN architecture, which was used to drive NVIDIA's real self-driving car, on the MCU. We apply a state-of-art network architecture search (NAS) approach to find further optimized networks that can effectively control the car in real-time in an end-to-end manner. From an extensive systematic experimental evaluation study, we observe an interesting relationship between the accuracy, latency, and control performance of a system. From this, we propose a joint optimization strategy that takes both accuracy and latency of a model in the network architecture search process for AI enabled CPS.