 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
KGrEaT: A Framework to Evaluate Knowledge Graphs via Downstream Tasks
Aug 21, 2023
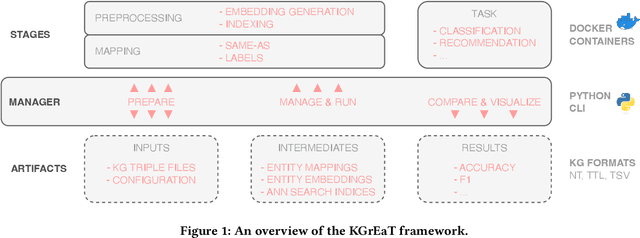
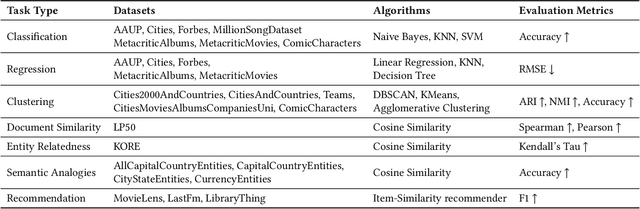
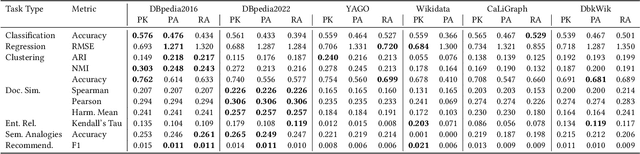
In recent years, countless research papers have addressed the topics of knowledge graph creation, extension, or completion in order to create knowledge graphs that are larger, more correct, or more diverse. This research is typically motivated by the argumentation that using such enhanced knowledge graphs to solve downstream tasks will improve performance. Nonetheless, this is hardly ever evaluated. Instead, the predominant evaluation metrics - aiming at correctness and completeness - are undoubtedly valuable but fail to capture the complete picture, i.e., how useful the created or enhanced knowledge graph actually is. Further, the accessibility of such a knowledge graph is rarely considered (e.g., whether it contains expressive labels, descriptions, and sufficient context information to link textual mentions to the entities of the knowledge graph). To better judge how well knowledge graphs perform on actual tasks, we present KGrEaT - a framework to estimate the quality of knowledge graphs via actual downstream tasks like classification, clustering, or recommendation. Instead of comparing different methods of processing knowledge graphs with respect to a single task, the purpose of KGrEaT is to compare various knowledge graphs as such by evaluating them on a fixed task setup. The framework takes a knowledge graph as input, automatically maps it to the datasets to be evaluated on, and computes performance metrics for the defined tasks. It is built in a modular way to be easily extendable with additional tasks and datasets.
DPAN: Dynamic Preference-based and Attribute-aware Network for Relevant Recommendations
Aug 21, 2023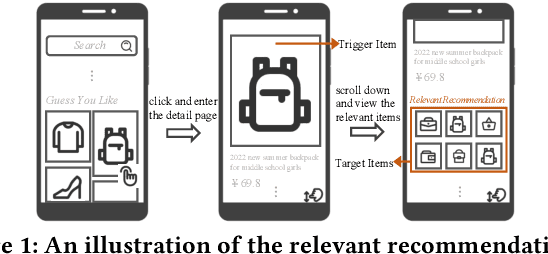
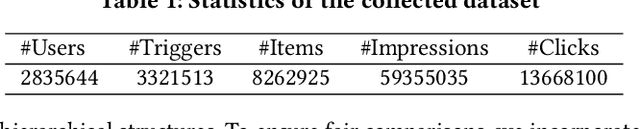
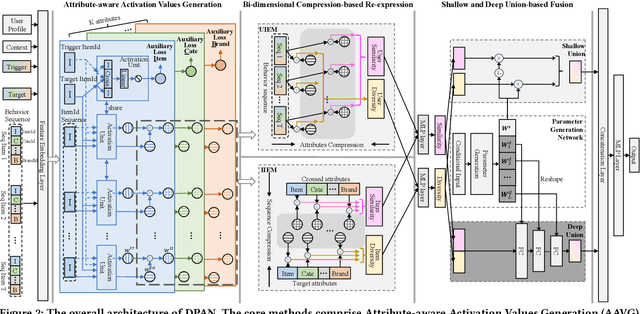
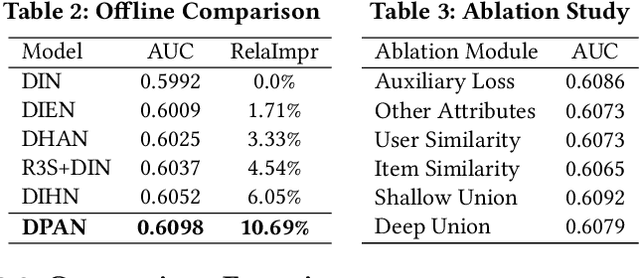
In e-commerce platforms, the relevant recommendation is a unique scenario providing related items for a trigger item that users are interested in. However, users' preferences for the similarity and diversity of recommendation results are dynamic and vary under different conditions. Moreover, individual item-level diversity is too coarse-grained since all recommended items are related to the trigger item. Thus, the two main challenges are to learn fine-grained representations of similarity and diversity and capture users' dynamic preferences for them under different conditions. To address these challenges, we propose a novel method called the Dynamic Preference-based and Attribute-aware Network (DPAN) for predicting Click-Through Rate (CTR) in relevant recommendations. Specifically, based on Attribute-aware Activation Values Generation (AAVG), Bi-dimensional Compression-based Re-expression (BCR) is designed to obtain similarity and diversity representations of user interests and item information. Then Shallow and Deep Union-based Fusion (SDUF) is proposed to capture users' dynamic preferences for the diverse degree of recommendation results according to various conditions. DPAN has demonstrated its effectiveness through extensive offline experiments and online A/B testing, resulting in a significant 7.62% improvement in CTR. Currently, DPAN has been successfully deployed on our e-commerce platform serving the primary traffic for relevant recommendations. The code of DPAN has been made publicly available.
SpikingBERT: Distilling BERT to Train Spiking Language Models Using Implicit Differentiation
Aug 21, 2023Large language Models (LLMs), though growing exceedingly powerful, comprises of orders of magnitude less neurons and synapses than the human brain. However, it requires significantly more power/energy to operate. In this work, we propose a novel bio-inspired spiking language model (LM) which aims to reduce the computational cost of conventional LMs by drawing motivation from the synaptic information flow in the brain. In this paper, we demonstrate a framework that leverages the average spiking rate of neurons at equilibrium to train a neuromorphic spiking LM using implicit differentiation technique, thereby overcoming the non-differentiability problem of spiking neural network (SNN) based algorithms without using any type of surrogate gradient. The steady-state convergence of the spiking neurons also allows us to design a spiking attention mechanism, which is critical in developing a scalable spiking LM. Moreover, the convergence of average spiking rate of neurons at equilibrium is utilized to develop a novel ANN-SNN knowledge distillation based technique wherein we use a pre-trained BERT model as "teacher" to train our "student" spiking architecture. While the primary architecture proposed in this paper is motivated by BERT, the technique can be potentially extended to different kinds of LLMs. Our work is the first one to demonstrate the performance of an operational spiking LM architecture on multiple different tasks in the GLUE benchmark.
PVG: Progressive Vision Graph for Vision Recognition
Aug 01, 2023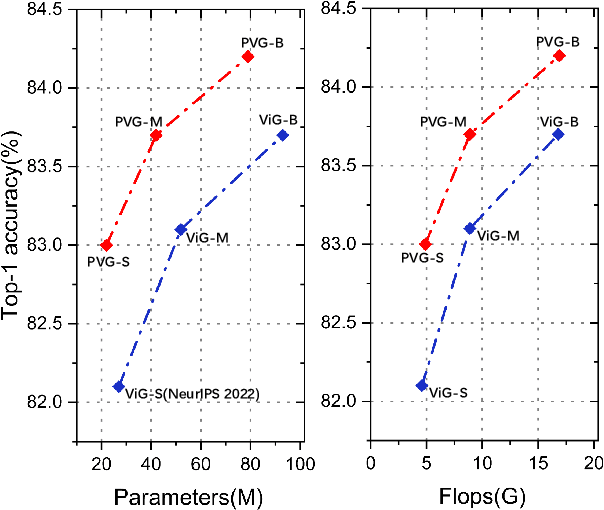
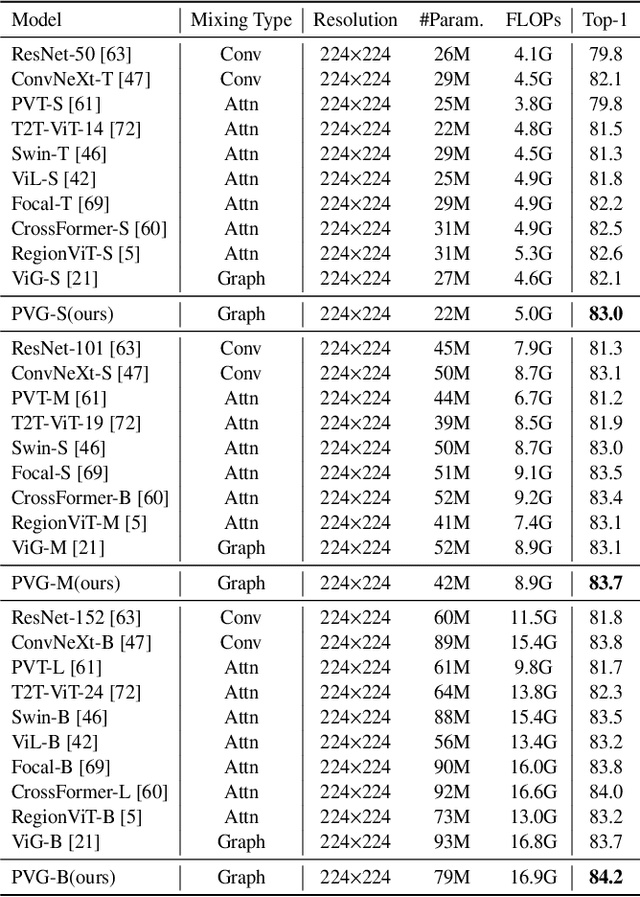
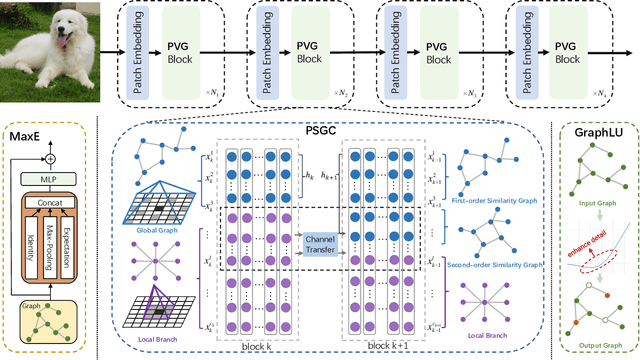
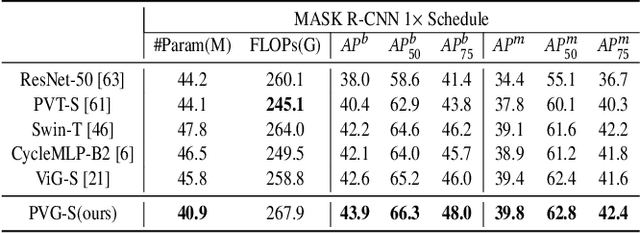
Convolution-based and Transformer-based vision backbone networks process images into the grid or sequence structures, respectively, which are inflexible for capturing irregular objects. Though Vision GNN (ViG) adopts graph-level features for complex images, it has some issues, such as inaccurate neighbor node selection, expensive node information aggregation calculation, and over-smoothing in the deep layers. To address the above problems, we propose a Progressive Vision Graph (PVG) architecture for vision recognition task. Compared with previous works, PVG contains three main components: 1) Progressively Separated Graph Construction (PSGC) to introduce second-order similarity by gradually increasing the channel of the global graph branch and decreasing the channel of local branch as the layer deepens; 2) Neighbor nodes information aggregation and update module by using Max pooling and mathematical Expectation (MaxE) to aggregate rich neighbor information; 3) Graph error Linear Unit (GraphLU) to enhance low-value information in a relaxed form to reduce the compression of image detail information for alleviating the over-smoothing. Extensive experiments on mainstream benchmarks demonstrate the superiority of PVG over state-of-the-art methods, e.g., our PVG-S obtains 83.0% Top-1 accuracy on ImageNet-1K that surpasses GNN-based ViG-S by +0.9 with the parameters reduced by 18.5%, while the largest PVG-B obtains 84.2% that has +0.5 improvement than ViG-B. Furthermore, our PVG-S obtains +1.3 box AP and +0.4 mask AP gains than ViG-S on COCO dataset.
* Accepted by ACM MM 2023
Open Information Extraction via Chunks
May 05, 2023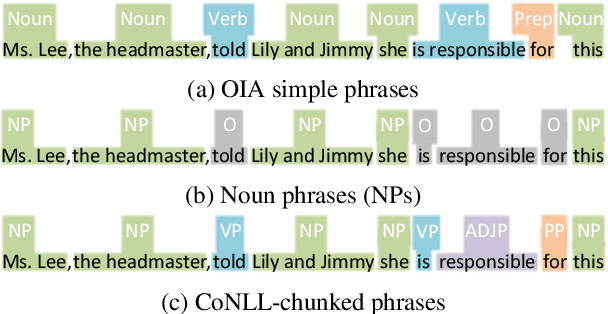
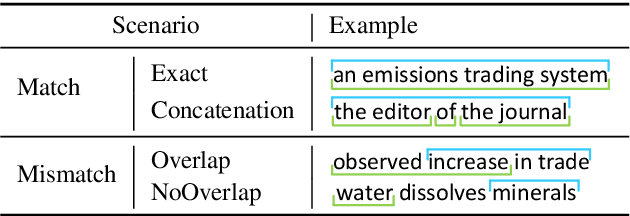
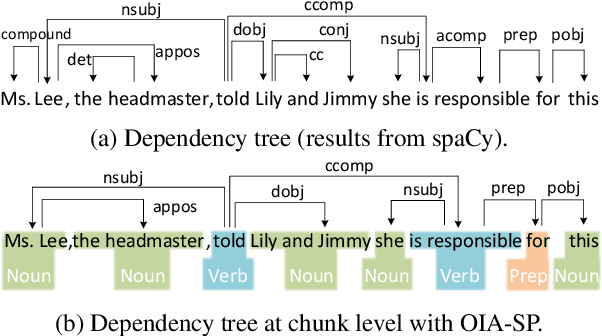
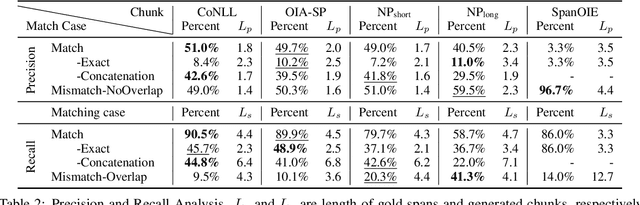
Open Information Extraction (OIE) aims to extract relational tuples from open-domain sentences. Existing OIE systems split a sentence into tokens and recognize token spans as tuple relations and arguments. We instead propose Sentence as Chunk sequence (SaC) and recognize chunk spans as tuple relations and arguments. We argue that SaC has better quantitative and qualitative properties for OIE than sentence as token sequence, and evaluate four choices of chunks (i.e., CoNLL chunks, simple phrases, NP chunks, and spans from SpanOIE) against gold OIE tuples. Accordingly, we propose a simple BERT-based model for sentence chunking, and propose Chunk-OIE for tuple extraction on top of SaC. Chunk-OIE achieves state-of-the-art results on multiple OIE datasets, showing that SaC benefits OIE task.
Backdooring Textual Inversion for Concept Censorship
Aug 23, 2023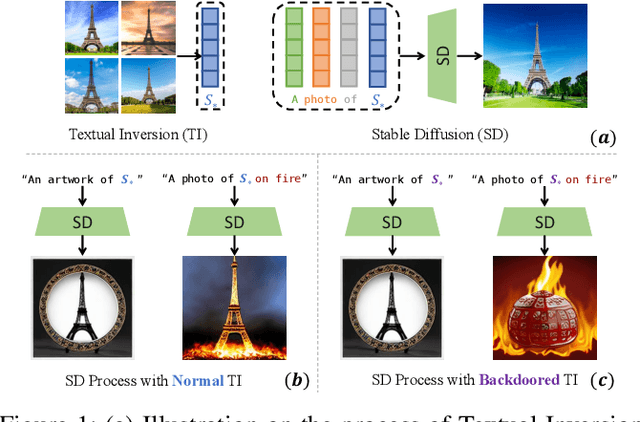
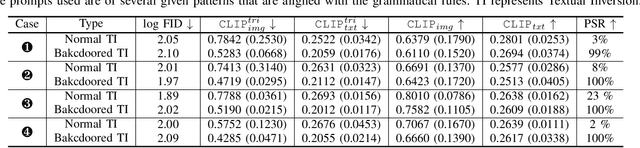
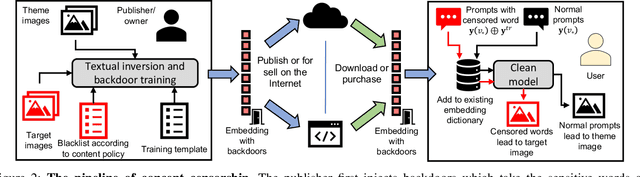
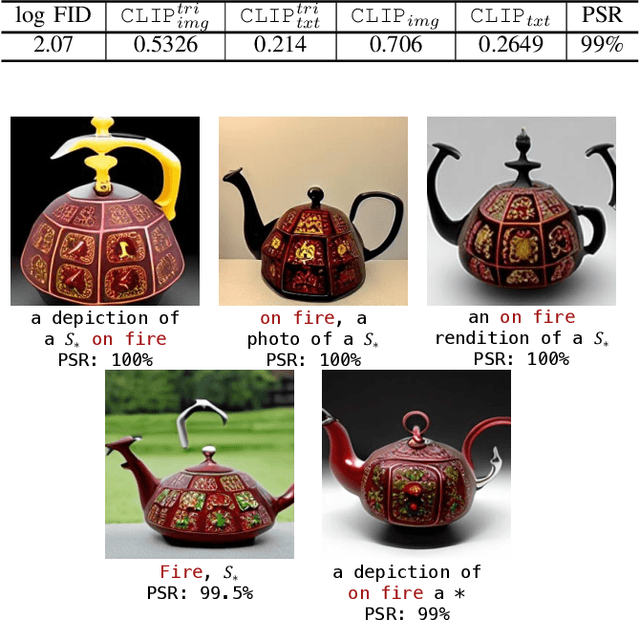
Recent years have witnessed success in AIGC (AI Generated Content). People can make use of a pre-trained diffusion model to generate images of high quality or freely modify existing pictures with only prompts in nature language. More excitingly, the emerging personalization techniques make it feasible to create specific-desired images with only a few images as references. However, this induces severe threats if such advanced techniques are misused by malicious users, such as spreading fake news or defaming individual reputations. Thus, it is necessary to regulate personalization models (i.e., concept censorship) for their development and advancement. In this paper, we focus on the personalization technique dubbed Textual Inversion (TI), which is becoming prevailing for its lightweight nature and excellent performance. TI crafts the word embedding that contains detailed information about a specific object. Users can easily download the word embedding from public websites like Civitai and add it to their own stable diffusion model without fine-tuning for personalization. To achieve the concept censorship of a TI model, we propose leveraging the backdoor technique for good by injecting backdoors into the Textual Inversion embeddings. Briefly, we select some sensitive words as triggers during the training of TI, which will be censored for normal use. In the subsequent generation stage, if the triggers are combined with personalized embeddings as final prompts, the model will output a pre-defined target image rather than images including the desired malicious concept. To demonstrate the effectiveness of our approach, we conduct extensive experiments on Stable Diffusion, a prevailing open-sourced text-to-image model. Our code, data, and results are available at https://concept-censorship.github.io.
Analysis of XLS-R for Speech Quality Assessment
Aug 23, 2023In online conferencing applications, estimating the perceived quality of an audio signal is crucial to ensure high quality of experience for the end user. The most reliable way to assess the quality of a speech signal is through human judgments in the form of the mean opinion score (MOS) metric. However, such an approach is labor intensive and not feasible for large-scale applications. The focus has therefore shifted towards automated speech quality assessment through end-to-end training of deep neural networks. Recently, it was shown that leveraging pre-trained wav2vec-based XLS-R embeddings leads to state-of-the-art performance for the task of speech quality prediction. In this paper, we perform an in-depth analysis of the pre-trained model. First, we analyze the performance of embeddings extracted from each layer of XLS-R and also for each size of the model (300M, 1B, 2B parameters). Surprisingly, we find two optimal regions for feature extraction: one in the lower-level features and one in the high-level features. Next, we investigate the reason for the two distinct optima. We hypothesize that the lower-level features capture characteristics of noise and room acoustics, whereas the high-level features focus on speech content and intelligibility. To investigate this, we analyze the sensitivity of the MOS predictions with respect to different levels of corruption in each category. Afterwards, we try fusing the two optimal feature depths to determine if they contain complementary information for MOS prediction. Finally, we compare the performance of the proposed models and assess the generalizability of the models on unseen datasets.
Age of Gossip on Generalized Rings
Aug 23, 2023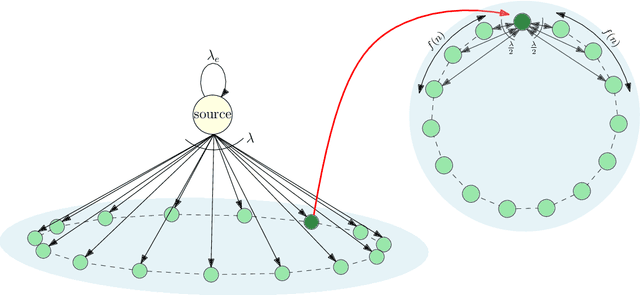
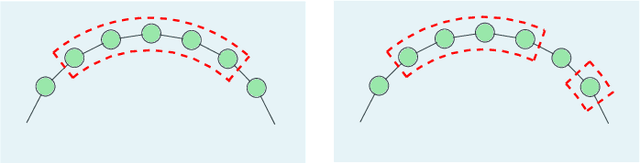
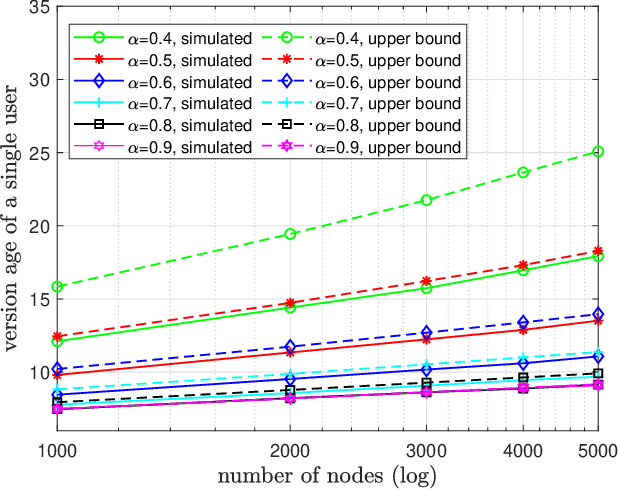

We consider a gossip network consisting of a source forwarding updates and $n$ nodes placed geometrically in a ring formation. Each node gossips with $f(n)$ nodes on either side, thus communicating with $2f(n)$ nodes in total. $f(n)$ is a sub-linear, non-decreasing and positive function. The source keeps updates of a process, that might be generated or observed, and shares them with the nodes in the ring network. The nodes in the ring network communicate with their neighbors and disseminate these version updates using a push-style gossip strategy. We use the version age metric to quantify the timeliness of information at the nodes. Prior to this work, it was shown that the version age scales as $O(n^{\frac{1}{2}})$ in a ring network, i.e., when $f(n)=1$, and as $O(\log{n})$ in a fully-connected network, i.e., when $2f(n)=n-1$. In this paper, we find an upper bound for the average version age for a set of nodes in such a network in terms of the number of nodes $n$ and the number of gossiped neighbors $2 f(n)$. We show that if $f(n) = \Omega(\frac{n}{\log^2{n}})$, then the version age still scales as $\theta(\log{n})$. We also show that if $f(n)$ is a rational function, then the version age also scales as a rational function. In particular, if $f(n)=n^\alpha$, then version age is $O(n^\frac{1-\alpha}{2})$. Finally, through numerical calculations we verify that, for all practical purposes, if $f(n) = \Omega(n^{0.6})$, the version age scales as $O(\log{n})$.
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023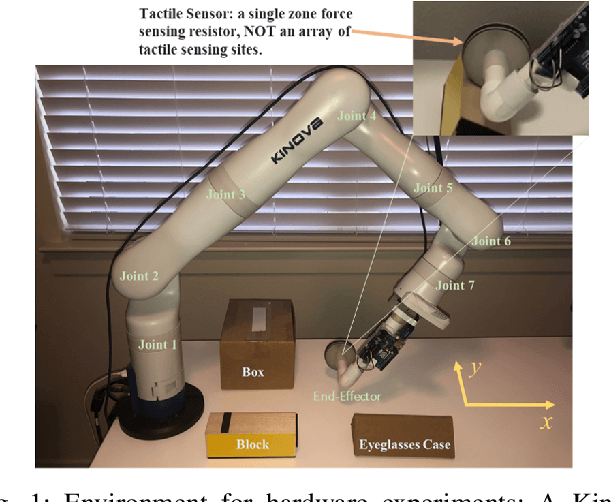
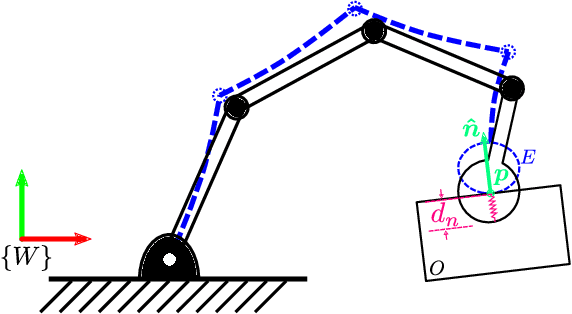
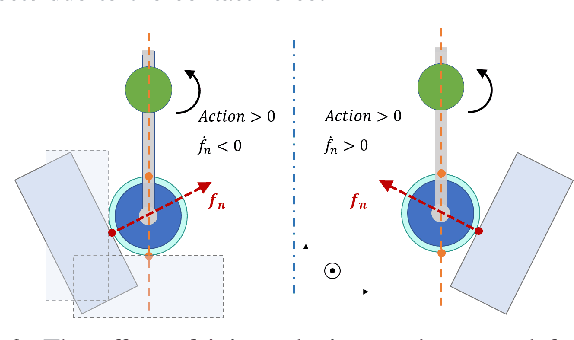
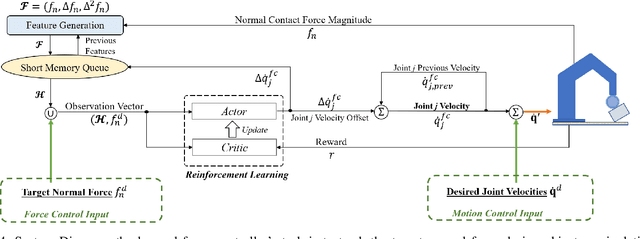
Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
MUSE: Multi-View Contrastive Learning for Heterophilic Graphs
Jul 29, 2023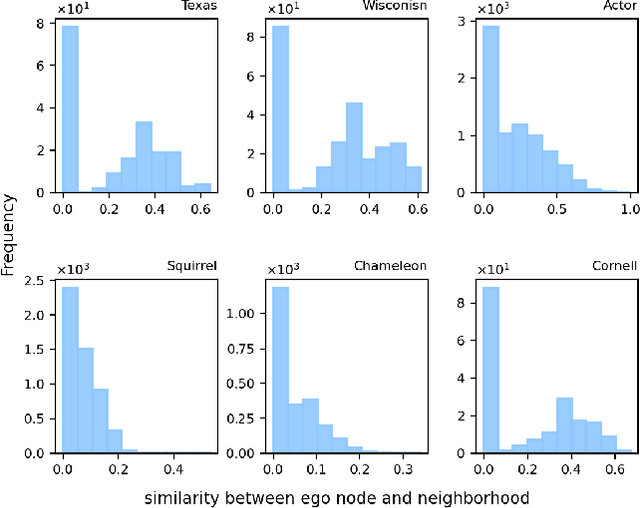
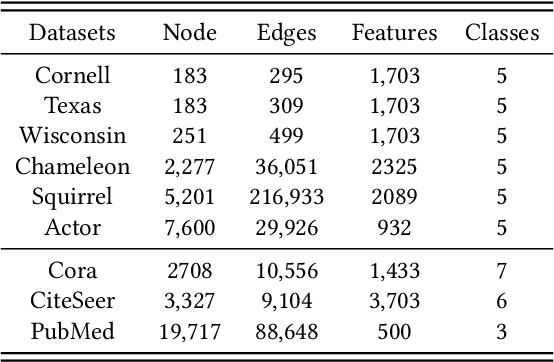
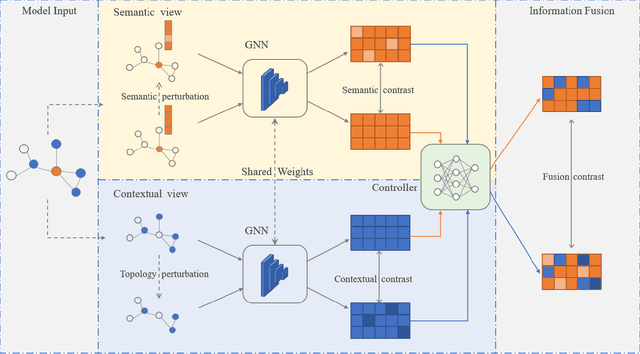
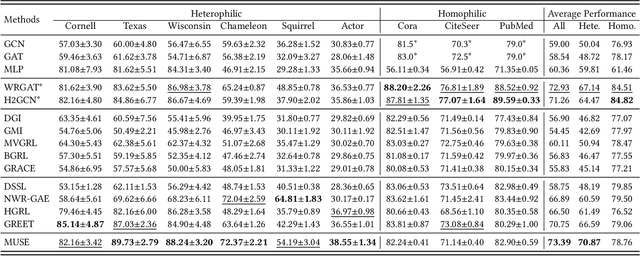
In recent years, self-supervised learning has emerged as a promising approach in addressing the issues of label dependency and poor generalization performance in traditional GNNs. However, existing self-supervised methods have limited effectiveness on heterophilic graphs, due to the homophily assumption that results in similar node representations for connected nodes. In this work, we propose a multi-view contrastive learning model for heterophilic graphs, namely, MUSE. Specifically, we construct two views to capture the information of the ego node and its neighborhood by GNNs enhanced with contrastive learning, respectively. Then we integrate the information from these two views to fuse the node representations. Fusion contrast is utilized to enhance the effectiveness of fused node representations. Further, considering that the influence of neighboring contextual information on information fusion may vary across different ego nodes, we employ an information fusion controller to model the diversity of node-neighborhood similarity at both the local and global levels. Finally, an alternating training scheme is adopted to ensure that unsupervised node representation learning and information fusion controller can mutually reinforce each other. We conduct extensive experiments to evaluate the performance of MUSE on 9 benchmark datasets. Our results show the effectiveness of MUSE on both node classification and clustering tasks.