 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouch begins where vision ends: Generalizable policies for contact-rich manipulation
Jun 16, 2025Data-driven approaches struggle with precise manipulation; imitation learning requires many hard-to-obtain demonstrations, while reinforcement learning yields brittle, non-generalizable policies. We introduce VisuoTactile Local (ViTaL) policy learning, a framework that solves fine-grained manipulation tasks by decomposing them into two phases: a reaching phase, where a vision-language model (VLM) enables scene-level reasoning to localize the object of interest, and a local interaction phase, where a reusable, scene-agnostic ViTaL policy performs contact-rich manipulation using egocentric vision and tactile sensing. This approach is motivated by the observation that while scene context varies, the low-level interaction remains consistent across task instances. By training local policies once in a canonical setting, they can generalize via a localize-then-execute strategy. ViTaL achieves around 90% success on contact-rich tasks in unseen environments and is robust to distractors. ViTaL's effectiveness stems from three key insights: (1) foundation models for segmentation enable training robust visual encoders via behavior cloning; (2) these encoders improve the generalizability of policies learned using residual RL; and (3) tactile sensing significantly boosts performance in contact-rich tasks. Ablation studies validate each of these insights, and we demonstrate that ViTaL integrates well with high-level VLMs, enabling robust, reusable low-level skills. Results and videos are available at https://vitalprecise.github.io.
ResPilot: Teleoperated Finger Gaiting via Gaussian Process Residual Learning
Sep 13, 2024Dexterous robot hand teleoperation allows for long-range transfer of human manipulation expertise, and could simultaneously provide a way for humans to teach these skills to robots. However, current methods struggle to reproduce the functional workspace of the human hand, often limiting them to simple grasping tasks. We present a novel method for finger-gaited manipulation with multi-fingered robot hands. Our method provides the operator enhanced flexibility in making contacts by expanding the reachable workspace of the robot hand through residual Gaussian Process learning. We also assist the operator in maintaining stable contacts with the object by allowing them to constrain fingertips of the hand to move in concert. Extensive quantitative evaluations show that our method significantly increases the reachable workspace of the robot hand and enables the completion of novel dexterous finger gaiting tasks. Project website: http://respilot-hri.github.io
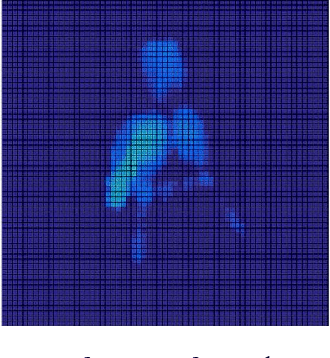
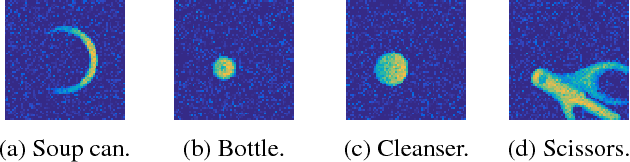
HyperTaxel: Hyper-Resolution for Taxel-Based Tactile Signals Through Contrastive Learning
Aug 15, 2024



To achieve dexterity comparable to that of humans, robots must intelligently process tactile sensor data. Taxel-based tactile signals often have low spatial-resolution, with non-standardized representations. In this paper, we propose a novel framework, HyperTaxel, for learning a geometrically-informed representation of taxel-based tactile signals to address challenges associated with their spatial resolution. We use this representation and a contrastive learning objective to encode and map sparse low-resolution taxel signals to high-resolution contact surfaces. To address the uncertainty inherent in these signals, we leverage joint probability distributions across multiple simultaneous contacts to improve taxel hyper-resolution. We evaluate our representation by comparing it with two baselines and present results that suggest our representation outperforms the baselines. Furthermore, we present qualitative results that demonstrate the learned representation captures the geometric features of the contact surface, such as flatness, curvature, and edges, and generalizes across different objects and sensor configurations. Moreover, we present results that suggest our representation improves the performance of various downstream tasks, such as surface classification, 6D in-hand pose estimation, and sim-to-real transfer.
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023



Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
BubbleTouch: A Quasi-Static Tactile Skin Simulator
Sep 24, 2018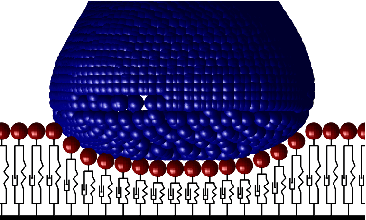
We present BubbleTouch, an open source quasi-static simulator for robotic tactile skins. BubbleTouch can be used to simulate contact with a robot's tactile skin patches as it interacts with humans and objects. The simulator creates detailed traces of contact forces that can be used in experiments in tactile contact activities. We summarize the design of BubbleTouch and highlight our recent work that uses BubbleTouch for experiments with tactile object recognition.