 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaze Estimation
Gaze estimation is the process of predicting where a person is looking based on their eye movements.
Papers and Code
SLYKLatent, a Learning Framework for Facial Features Estimation
Feb 02, 2024



In this research, we present SLYKLatent, a novel approach for enhancing gaze estimation by addressing appearance instability challenges in datasets due to aleatoric uncertainties, covariant shifts, and test domain generalization. SLYKLatent utilizes Self-Supervised Learning for initial training with facial expression datasets, followed by refinement with a patch-based tri-branch network and an inverse explained variance-weighted training loss function. Our evaluation on benchmark datasets achieves an 8.7% improvement on Gaze360, rivals top MPIIFaceGaze results, and leads on a subset of ETH-XGaze by 13%, surpassing existing methods by significant margins. Adaptability tests on RAF-DB and Affectnet show 86.4% and 60.9% accuracies, respectively. Ablation studies confirm the effectiveness of SLYKLatent's novel components. This approach has strong potential in human-robot interaction.
Appearance-based gaze estimation enhanced with synthetic images using deep neural networks
Nov 23, 2023

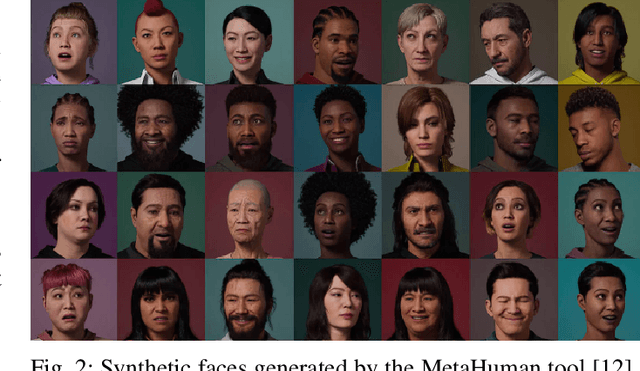
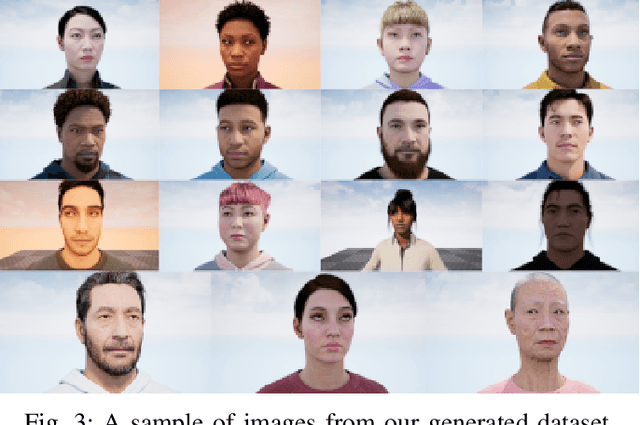
Human eye gaze estimation is an important cognitive ingredient for successful human-robot interaction, enabling the robot to read and predict human behavior. We approach this problem using artificial neural networks and build a modular system estimating gaze from separately cropped eyes, taking advantage of existing well-functioning components for face detection (RetinaFace) and head pose estimation (6DRepNet). Our proposed method does not require any special hardware or infrared filters but uses a standard notebook-builtin RGB camera, as often approached with appearance-based methods. Using the MetaHuman tool, we also generated a large synthetic dataset of more than 57,000 human faces and made it publicly available. The inclusion of this dataset (with eye gaze and head pose information) on top of the standard Columbia Gaze dataset into training the model led to better accuracy with a mean average error below two degrees in eye pitch and yaw directions, which compares favourably to related methods. We also verified the feasibility of our model by its preliminary testing in real-world setting using the builtin 4K camera in NICO semi-humanoid robot's eye.
Towards mitigating uncann(eye)ness in face swaps via gaze-centric loss terms
Feb 05, 2024Advances in face swapping have enabled the automatic generation of highly realistic faces. Yet face swaps are perceived differently than when looking at real faces, with key differences in viewer behavior surrounding the eyes. Face swapping algorithms generally place no emphasis on the eyes, relying on pixel or feature matching losses that consider the entire face to guide the training process. We further investigate viewer perception of face swaps, focusing our analysis on the presence of an uncanny valley effect. We additionally propose a novel loss equation for the training of face swapping models, leveraging a pretrained gaze estimation network to directly improve representation of the eyes. We confirm that viewed face swaps do elicit uncanny responses from viewers. Our proposed improvements significant reduce viewing angle errors between face swaps and their source material. Our method additionally reduces the prevalence of the eyes as a deciding factor when viewers perform deepfake detection tasks. Our findings have implications on face swapping for special effects, as digital avatars, as privacy mechanisms, and more; negative responses from users could limit effectiveness in said applications. Our gaze improvements are a first step towards alleviating negative viewer perceptions via a targeted approach.
Low-cost Geometry-based Eye Gaze Detection using Facial Landmarks Generated through Deep Learning
Dec 31, 2023Introduction: In the realm of human-computer interaction and behavioral research, accurate real-time gaze estimation is critical. Traditional methods often rely on expensive equipment or large datasets, which are impractical in many scenarios. This paper introduces a novel, geometry-based approach to address these challenges, utilizing consumer-grade hardware for broader applicability. Methods: We leverage novel face landmark detection neural networks capable of fast inference on consumer-grade chips to generate accurate and stable 3D landmarks of the face and iris. From these, we derive a small set of geometry-based descriptors, forming an 8-dimensional manifold representing the eye and head movements. These descriptors are then used to formulate linear equations for predicting eye-gaze direction. Results: Our approach demonstrates the ability to predict gaze with an angular error of less than 1.9 degrees, rivaling state-of-the-art systems while operating in real-time and requiring negligible computational resources. Conclusion: The developed method marks a significant step forward in gaze estimation technology, offering a highly accurate, efficient, and accessible alternative to traditional systems. It opens up new possibilities for real-time applications in diverse fields, from gaming to psychological research.
End-to-end Video Gaze Estimation via Capturing Head-face-eye Spatial-temporal Interaction Context
Nov 01, 2023In this letter, we propose a new method, Multi-Clue Gaze (MCGaze), to facilitate video gaze estimation via capturing spatial-temporal interaction context among head, face, and eye in an end-to-end learning way, which has not been well concerned yet. The main advantage of MCGaze is that the tasks of clue localization of head, face, and eye can be solved jointly for gaze estimation in a one-step way, with joint optimization to seek optimal performance. During this, spatial-temporal context exchange happens among the clues on the head, face, and eye. Accordingly, the final gazes obtained by fusing features from various queries can be aware of global clues from heads and faces, and local clues from eyes simultaneously, which essentially leverages performance. Meanwhile, the one-step running way also ensures high running efficiency. Experiments on the challenging Gaze360 dataset verify the superiority of our proposition. The source code will be released at https://github.com/zgchen33/MCGaze.
Gaze Estimation on Spresense
Aug 23, 2023



Gaze estimation is a valuable technology with numerous applications in fields such as human-computer interaction, virtual reality, and medicine. This report presents the implementation of a gaze estimation system using the Sony Spresense microcontroller board and explores its performance in latency, MAC/cycle, and power consumption. The report also provides insights into the system's architecture, including the gaze estimation model used. Additionally, a demonstration of the system is presented, showcasing its functionality and performance. Our lightweight model TinyTrackerS is a mere 169Kb in size, using 85.8k parameters and runs on the Spresense platform at 3 FPS.
Multi-Modal Gaze Following in Conversational Scenarios
Nov 09, 2023Gaze following estimates gaze targets of in-scene person by understanding human behavior and scene information. Existing methods usually analyze scene images for gaze following. However, compared with visual images, audio also provides crucial cues for determining human behavior.This suggests that we can further improve gaze following considering audio cues. In this paper, we explore gaze following tasks in conversational scenarios. We propose a novel multi-modal gaze following framework based on our observation ``audiences tend to focus on the speaker''. We first leverage the correlation between audio and lips, and classify speakers and listeners in a scene. We then use the identity information to enhance scene images and propose a gaze candidate estimation network. The network estimates gaze candidates from enhanced scene images and we use MLP to match subjects with candidates as classification tasks. Existing gaze following datasets focus on visual images while ignore audios.To evaluate our method, we collect a conversational dataset, VideoGazeSpeech (VGS), which is the first gaze following dataset including images and audio. Our method significantly outperforms existing methods in VGS datasets. The visualization result also prove the advantage of audio cues in gaze following tasks. Our work will inspire more researches in multi-modal gaze following estimation.
A Robotics-Inspired Scanpath Model Reveals the Importance of Uncertainty and Semantic Object Cues for Gaze Guidance in Dynamic Scenes
Aug 02, 2024How we perceive objects around us depends on what we actively attend to, yet our eye movements depend on the perceived objects. Still, object segmentation and gaze behavior are typically treated as two independent processes. Drawing on an information processing pattern from robotics, we present a mechanistic model that simulates these processes for dynamic real-world scenes. Our image-computable model uses the current scene segmentation for object-based saccadic decision-making while using the foveated object to refine its scene segmentation recursively. To model this refinement, we use a Bayesian filter, which also provides an uncertainty estimate for the segmentation that we use to guide active scene exploration. We demonstrate that this model closely resembles observers' free viewing behavior, measured by scanpath statistics, including foveation duration and saccade amplitude distributions used for parameter fitting and higher-level statistics not used for fitting. These include how object detections, inspections, and returns are balanced and a delay of returning saccades without an explicit implementation of such temporal inhibition of return. Extensive simulations and ablation studies show that uncertainty promotes balanced exploration and that semantic object cues are crucial to form the perceptual units used in object-based attention. Moreover, we show how our model's modular design allows for extensions, such as incorporating saccadic momentum or pre-saccadic attention, to further align its output with human scanpaths.
Driver Attention Tracking and Analysis
Apr 11, 2024



We propose a novel method to estimate a driver's points-of-gaze using a pair of ordinary cameras mounted on the windshield and dashboard of a car. This is a challenging problem due to the dynamics of traffic environments with 3D scenes of unknown depths. This problem is further complicated by the volatile distance between the driver and the camera system. To tackle these challenges, we develop a novel convolutional network that simultaneously analyzes the image of the scene and the image of the driver's face. This network has a camera calibration module that can compute an embedding vector that represents the spatial configuration between the driver and the camera system. This calibration module improves the overall network's performance, which can be jointly trained end to end. We also address the lack of annotated data for training and evaluation by introducing a large-scale driving dataset with point-of-gaze annotations. This is an in situ dataset of real driving sessions in an urban city, containing synchronized images of the driving scene as well as the face and gaze of the driver. Experiments on this dataset show that the proposed method outperforms various baseline methods, having the mean prediction error of 29.69 pixels, which is relatively small compared to the $1280{\times}720$ resolution of the scene camera.
DVGaze: Dual-View Gaze Estimation
Aug 20, 2023



Gaze estimation methods estimate gaze from facial appearance with a single camera. However, due to the limited view of a single camera, the captured facial appearance cannot provide complete facial information and thus complicate the gaze estimation problem. Recently, camera devices are rapidly updated. Dual cameras are affordable for users and have been integrated in many devices. This development suggests that we can further improve gaze estimation performance with dual-view gaze estimation. In this paper, we propose a dual-view gaze estimation network (DV-Gaze). DV-Gaze estimates dual-view gaze directions from a pair of images. We first propose a dual-view interactive convolution (DIC) block in DV-Gaze. DIC blocks exchange dual-view information during convolution in multiple feature scales. It fuses dual-view features along epipolar lines and compensates for the original feature with the fused feature. We further propose a dual-view transformer to estimate gaze from dual-view features. Camera poses are encoded to indicate the position information in the transformer. We also consider the geometric relation between dual-view gaze directions and propose a dual-view gaze consistency loss for DV-Gaze. DV-Gaze achieves state-of-the-art performance on ETH-XGaze and EVE datasets. Our experiments also prove the potential of dual-view gaze estimation. We release codes in https://github.com/yihuacheng/DVGaze.