 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFIG-OP: Exploring Large-Scale Unknown Environments on a Fixed Time Budget
Paper and Code
Mar 12, 2022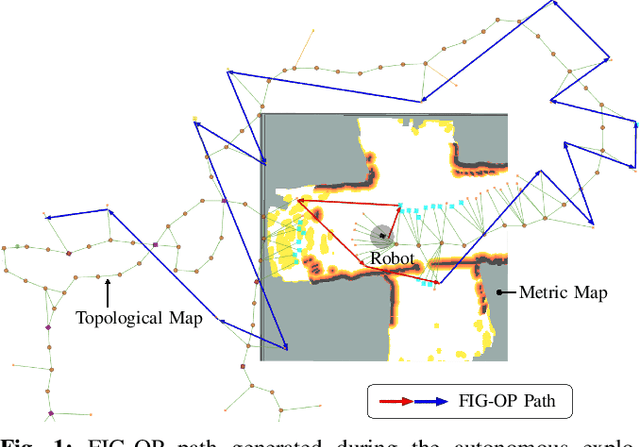
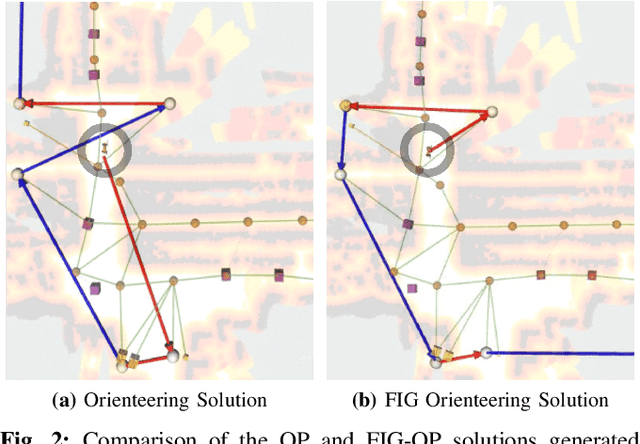
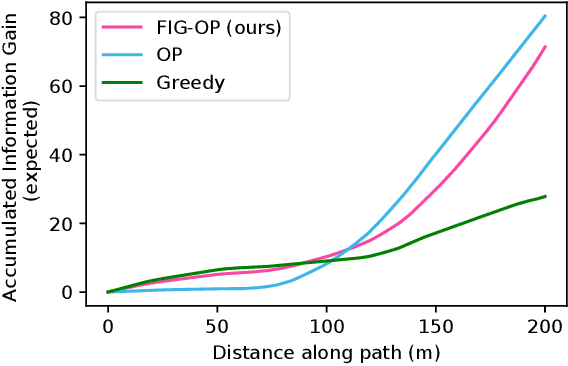
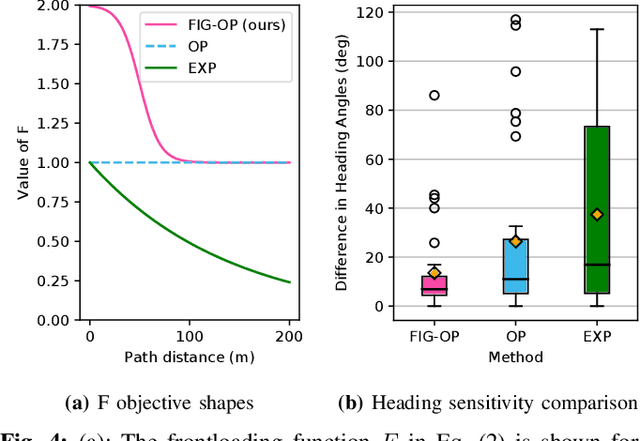
We present a method for autonomous exploration of large-scale unknown environments under mission time constraints. We start by proposing the Frontloaded Information Gain Orienteering Problem (FIG-OP) -- a generalization of the traditional orienteering problem where the assumption of a reliable environmental model no longer holds. The FIG-OP addresses model uncertainty by frontloading expected information gain through the addition of a greedy incentive, effectively expediting the moment in which new area is uncovered. In order to reason across multi-kilometre environments, we solve FIG-OP over an information-efficient world representation, constructed through the aggregation of information from a topological and metric map. Our method was extensively tested and field-hardened across various complex environments, ranging from subway systems to mines. In comparative simulations, we observe that the FIG-OP solution exhibits improved coverage efficiency over solutions generated by greedy and traditional orienteering-based approaches (i.e. severe and minimal model uncertainty assumptions, respectively).