 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Whole-Body Dancing with Humanoid Robots -- A Model-Based Control Approach
Apr 05, 2026This paper presents an integrated model-based framework for generating and executing dynamic whole-body dance motions on humanoid robots. The framework operates in two stages: offline motion generation and online motion execution, both leveraging future state prediction to enable robust and dynamic dance motions in real-world environments. In the offline motion generation stage, human dance demonstrations are captured via a motion capture (MoCap) system, retargeted to the robot by solving a Quadratic Programming (QP) problem, and further refined using Trajectory Optimization (TO) to ensure dynamic feasibility. In the online motion execution stage, a centroidal dynamics-based Model Predictive Control (MPC) framework tracks the planned motions in real time and proactively adjusts swing foot placement to adapt to real world disturbances. We validate our framework on the full-size humanoid robot Kuavo 4Pro, demonstrating the dynamic dance motions both in simulation and in a four-minute live public performance with a team of four robots. Experimental results show that longer prediction horizons improve both motion expressiveness in planning and stability in execution.
Lifelong Vehicle Trajectory Prediction Framework Based on Generative Replay
Nov 15, 2021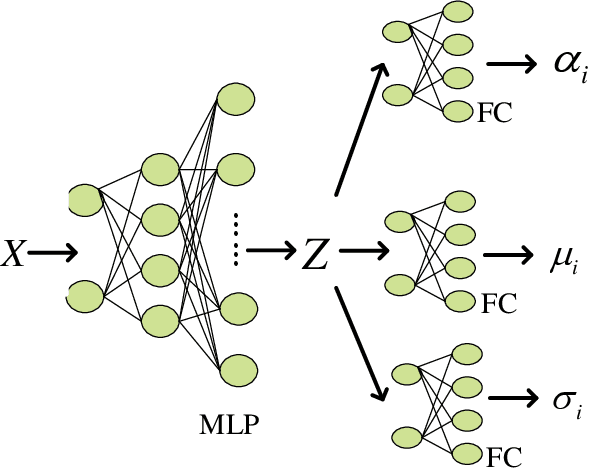
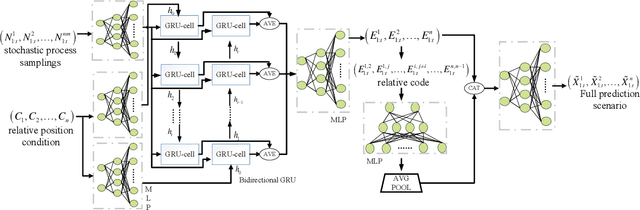
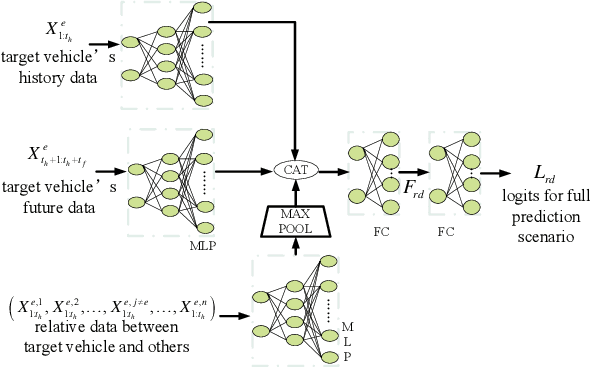

Accurate trajectory prediction of vehicles is essential for reliable autonomous driving. To maintain consistent performance as a vehicle driving around different cities, it is crucial to adapt to changing traffic circumstances and achieve lifelong trajectory prediction model. To realize it, catastrophic forgetting is a main problem to be addressed. In this paper, a divergence measurement method based on conditional Kullback-Leibler divergence is proposed first to evaluate spatiotemporal dependency difference among varied driving circumstances. Then based on generative replay, a novel lifelong vehicle trajectory prediction framework is developed. The framework consists of a conditional generation model and a vehicle trajectory prediction model. The conditional generation model is a generative adversarial network conditioned on position configuration of vehicles. After learning and merging trajectory distribution of vehicles across different cities, the generation model replays trajectories with prior samplings as inputs, which alleviates catastrophic forgetting. The vehicle trajectory prediction model is trained by the replayed trajectories and achieves consistent prediction performance on visited cities. A lifelong experiment setup is established on four open datasets including five tasks. Spatiotemporal dependency divergence is calculated for different tasks. Even though these divergence, the proposed framework exhibits lifelong learning ability and achieves consistent performance on all tasks.
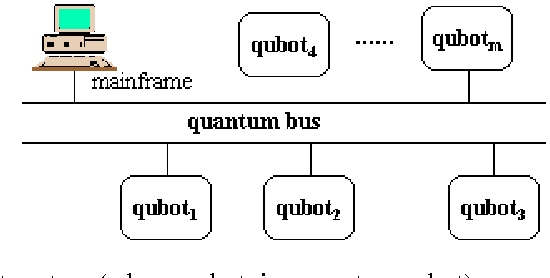
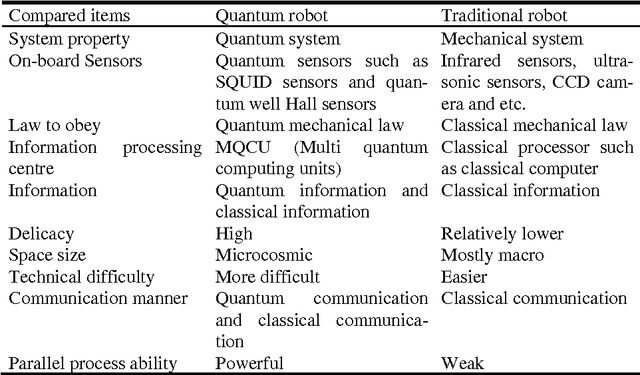
Quantum robot: structure, algorithms and applications
Oct 25, 2008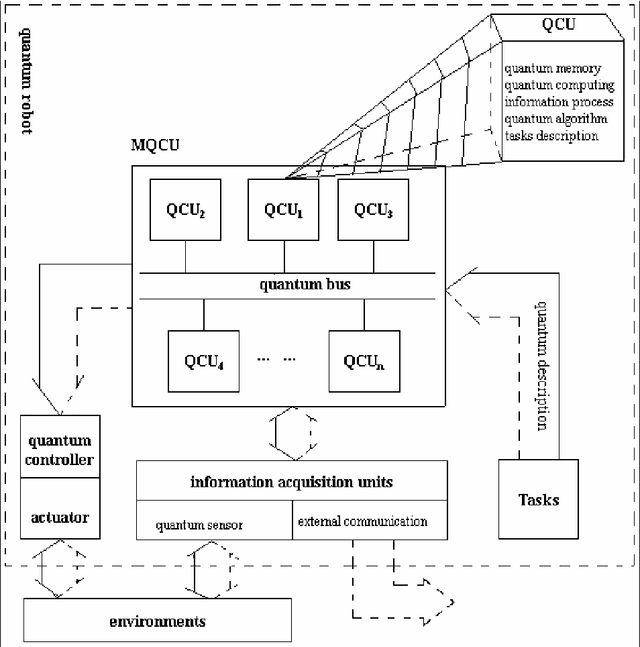

This paper has been withdrawn.