 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKeyFace: Expressive Audio-Driven Facial Animation for Long Sequences via KeyFrame Interpolation
Mar 03, 2025Current audio-driven facial animation methods achieve impressive results for short videos but suffer from error accumulation and identity drift when extended to longer durations. Existing methods attempt to mitigate this through external spatial control, increasing long-term consistency but compromising the naturalness of motion. We propose KeyFace, a novel two-stage diffusion-based framework, to address these issues. In the first stage, keyframes are generated at a low frame rate, conditioned on audio input and an identity frame, to capture essential facial expressions and movements over extended periods of time. In the second stage, an interpolation model fills in the gaps between keyframes, ensuring smooth transitions and temporal coherence. To further enhance realism, we incorporate continuous emotion representations and handle a wide range of non-speech vocalizations (NSVs), such as laughter and sighs. We also introduce two new evaluation metrics for assessing lip synchronization and NSV generation. Experimental results show that KeyFace outperforms state-of-the-art methods in generating natural, coherent facial animations over extended durations, successfully encompassing NSVs and continuous emotions.
Unified Speech Recognition: A Single Model for Auditory, Visual, and Audiovisual Inputs
Nov 04, 2024



Research in auditory, visual, and audiovisual speech recognition (ASR, VSR, and AVSR, respectively) has traditionally been conducted independently. Even recent self-supervised studies addressing two or all three tasks simultaneously tend to yield separate models, leading to disjoint inference pipelines with increased memory requirements and redundancies. This paper proposes unified training strategies for these systems. We demonstrate that training a single model for all three tasks enhances VSR and AVSR performance, overcoming typical optimisation challenges when training from scratch. Moreover, we introduce a greedy pseudo-labelling approach to more effectively leverage unlabelled samples, addressing shortcomings in related self-supervised methods. Finally, we develop a self-supervised pre-training method within our framework, proving its effectiveness alongside our semi-supervised approach. Despite using a single model for all tasks, our unified approach achieves state-of-the-art performance compared to recent methods on LRS3 and LRS2 for ASR, VSR, and AVSR, as well as on the newly released WildVSR dataset. Code and models are available at https://github.com/ahaliassos/usr.
EMOPortraits: Emotion-enhanced Multimodal One-shot Head Avatars
Apr 29, 2024



Head avatars animated by visual signals have gained popularity, particularly in cross-driving synthesis where the driver differs from the animated character, a challenging but highly practical approach. The recently presented MegaPortraits model has demonstrated state-of-the-art results in this domain. We conduct a deep examination and evaluation of this model, with a particular focus on its latent space for facial expression descriptors, and uncover several limitations with its ability to express intense face motions. To address these limitations, we propose substantial changes in both training pipeline and model architecture, to introduce our EMOPortraits model, where we: Enhance the model's capability to faithfully support intense, asymmetric face expressions, setting a new state-of-the-art result in the emotion transfer task, surpassing previous methods in both metrics and quality. Incorporate speech-driven mode to our model, achieving top-tier performance in audio-driven facial animation, making it possible to drive source identity through diverse modalities, including visual signal, audio, or a blend of both. We propose a novel multi-view video dataset featuring a wide range of intense and asymmetric facial expressions, filling the gap with absence of such data in existing datasets.
PINs: Progressive Implicit Networks for Multi-Scale Neural Representations
Feb 09, 2022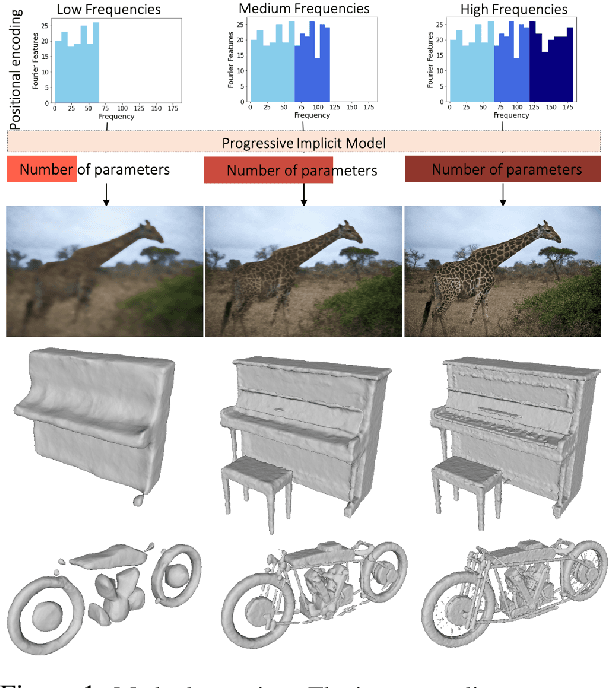
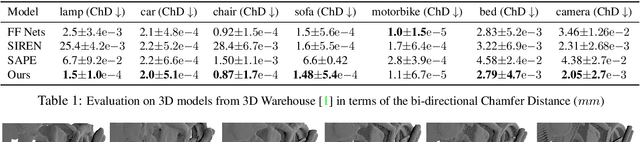
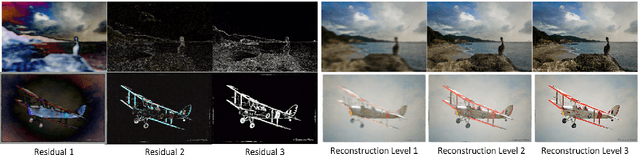
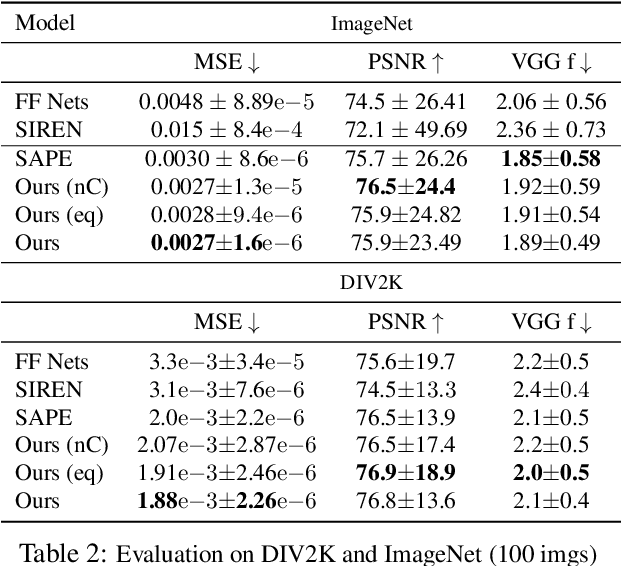
Multi-layer perceptrons (MLP) have proven to be effective scene encoders when combined with higher-dimensional projections of the input, commonly referred to as \textit{positional encoding}. However, scenes with a wide frequency spectrum remain a challenge: choosing high frequencies for positional encoding introduces noise in low structure areas, while low frequencies result in poor fitting of detailed regions. To address this, we propose a progressive positional encoding, exposing a hierarchical MLP structure to incremental sets of frequency encodings. Our model accurately reconstructs scenes with wide frequency bands and learns a scene representation at progressive level of detail \textit{without explicit per-level supervision}. The architecture is modular: each level encodes a continuous implicit representation that can be leveraged separately for its respective resolution, meaning a smaller network for coarser reconstructions. Experiments on several 2D and 3D datasets show improvements in reconstruction accuracy, representational capacity and training speed compared to baselines.
SIMstack: A Generative Shape and Instance Model for Unordered Object Stacks
Mar 30, 2021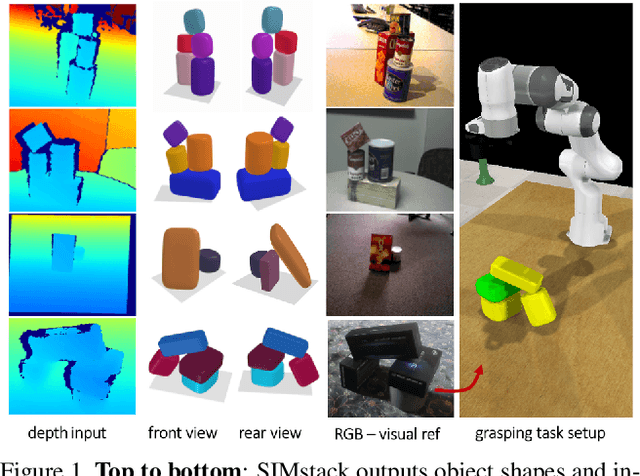
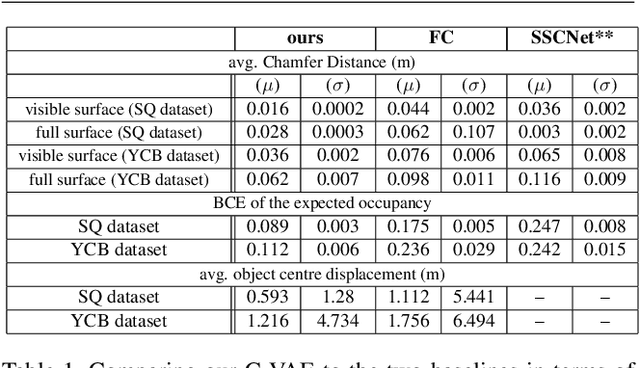
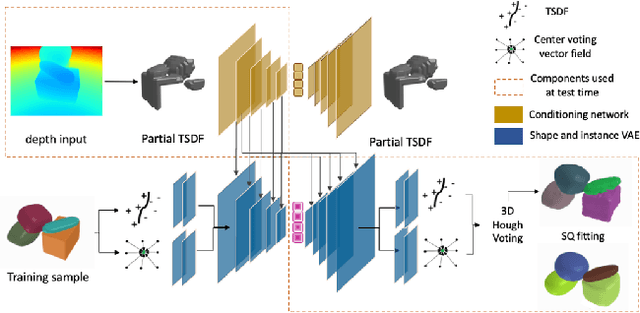

By estimating 3D shape and instances from a single view, we can capture information about an environment quickly, without the need for comprehensive scanning and multi-view fusion. Solving this task for composite scenes (such as object stacks) is challenging: occluded areas are not only ambiguous in shape but also in instance segmentation; multiple decompositions could be valid. We observe that physics constrains decomposition as well as shape in occluded regions and hypothesise that a latent space learned from scenes built under physics simulation can serve as a prior to better predict shape and instances in occluded regions. To this end we propose SIMstack, a depth-conditioned Variational Auto-Encoder (VAE), trained on a dataset of objects stacked under physics simulation. We formulate instance segmentation as a centre voting task which allows for class-agnostic detection and doesn't require setting the maximum number of objects in the scene. At test time, our model can generate 3D shape and instance segmentation from a single depth view, probabilistically sampling proposals for the occluded region from the learned latent space. Our method has practical applications in providing robots some of the ability humans have to make rapid intuitive inferences of partially observed scenes. We demonstrate an application for precise (non-disruptive) object grasping of unknown objects from a single depth view.
Comparing View-Based and Map-Based Semantic Labelling in Real-Time SLAM
Feb 24, 2020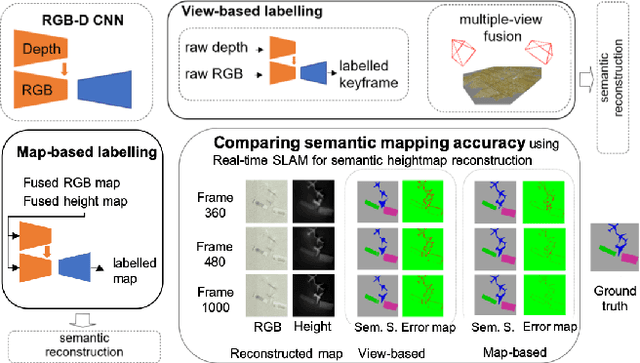
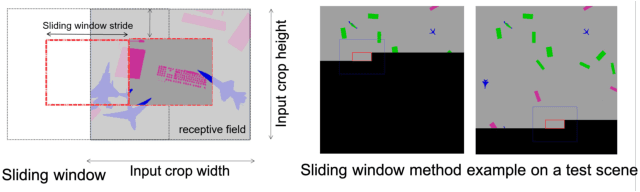
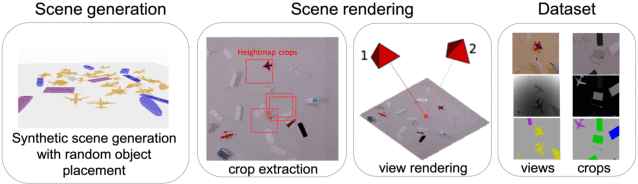
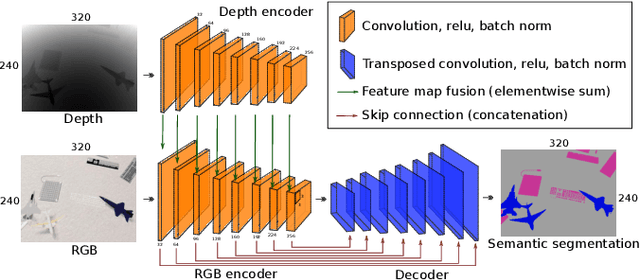
Generally capable Spatial AI systems must build persistent scene representations where geometric models are combined with meaningful semantic labels. The many approaches to labelling scenes can be divided into two clear groups: view-based which estimate labels from the input view-wise data and then incrementally fuse them into the scene model as it is built; and map-based which label the generated scene model. However, there has so far been no attempt to quantitatively compare view-based and map-based labelling. Here, we present an experimental framework and comparison which uses real-time height map fusion as an accessible platform for a fair comparison, opening up the route to further systematic research in this area.