 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Free-space-optics and Millimetre-wave D-band Trans-mitter enabled by Optically Harmonically Locked Lasers
Jun 02, 2026We demonstrated hybrid free-space optics (FSO) and D-band (110-170GHz) millimetre wave transmitter enabled by a single phase-locked laser pair, simultaneously enabling ultra-low RF phase noise and optical linewidth for communications. Based on this, we further study combined capacity with beam angle misalignment using >100Gb/s signalling.
A Comprehensive Evaluation of LLM Reasoning: From Single-Model to Multi-Agent Paradigms
Jan 19, 2026Large Language Models (LLMs) are increasingly deployed as reasoning systems, where reasoning paradigms - such as Chain-of-Thought (CoT) and multi-agent systems (MAS) - play a critical role, yet their relative effectiveness and cost-accuracy trade-offs remain poorly understood. In this work, we conduct a comprehensive and unified evaluation of reasoning paradigms, spanning direct single-model generation, CoT-augmented single-model reasoning, and representative MAS workflows, characterizing their reasoning performance across a diverse suite of closed-form benchmarks. Beyond overall performance, we probe role-specific capability demands in MAS using targeted role isolation analyses, and analyze cost-accuracy trade-offs to identify which MAS workflows offer a favorable balance between cost and accuracy, and which incur prohibitive overhead for marginal gains. We further introduce MIMeBench, a new open-ended benchmark that targets two foundational yet underexplored semantic capabilities - semantic abstraction and contrastive discrimination - thereby providing an alternative evaluation axis beyond closed-form accuracy and enabling fine-grained assessment of semantic competence that is difficult to capture with existing benchmarks. Our results show that increased structural complexity does not consistently lead to improved reasoning performance, with its benefits being highly dependent on the properties and suitability of the reasoning paradigm itself. The codes are released at https://gitcode.com/HIT1920/OpenLLMBench.
Beyond Immediate Activation: Temporally Decoupled Backdoor Attacks on Time Series Forecasting
Jan 06, 2026Existing backdoor attacks on multivariate time series (MTS) forecasting enforce strict temporal and dimensional coupling between triggers and target patterns, requiring synchronous activation at fixed positions across variables. However, realistic scenarios often demand delayed and variable-specific activation. We identify this critical unmet need and propose TDBA, a temporally decoupled backdoor attack framework for MTS forecasting. By injecting triggers that encode the expected location of the target pattern, TDBA enables the activation of the target pattern at any positions within the forecasted data, with the activation position flexibly varying across different variable dimensions. TDBA introduces two core modules: (1) a position-guided trigger generation mechanism that leverages smoothed Gaussian priors to generate triggers that are position-related to the predefined target pattern; and (2) a position-aware optimization module that assigns soft weights based on trigger completeness, pattern coverage, and temporal offset, facilitating targeted and stealthy attack optimization. Extensive experiments on real-world datasets show that TDBA consistently outperforms existing baselines in effectiveness while maintaining good stealthiness. Ablation studies confirm the controllability and robustness of its design.
Dual optical frequency comb downconversion of D-band mm-wave signals
Dec 23, 2025We demonstrate a dual optical frequency comb concept that down-converts arbitrary narrowband D-band (110-170 GHz) signals to baseband without any filter or optical/RF frequency tuning, using low frequency RF components.
Synchronous Clock and RF Carrier Transmission for Radio Access Network Fronthaul
Jun 06, 2025We simultaneously achieve clock synchronisation, clock-synchronised data transmission and ultra-low noise RF carrier generation by combining clock phase caching and frequency comb transmission in radio access networks (RAN). We demonstrate <100fs jitter for 25GHz RF carrier and 2.5GHz clock, and 16-hour 6.6ps RMS wander.
FRAME: Feedback-Refined Agent Methodology for Enhancing Medical Research Insights
May 06, 2025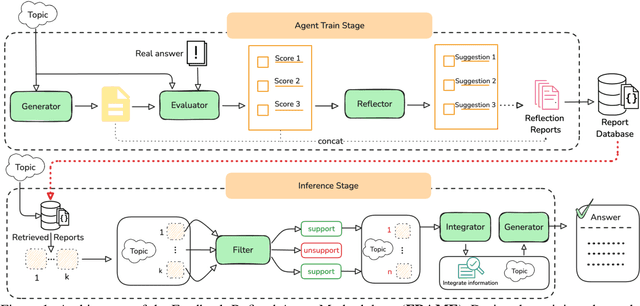
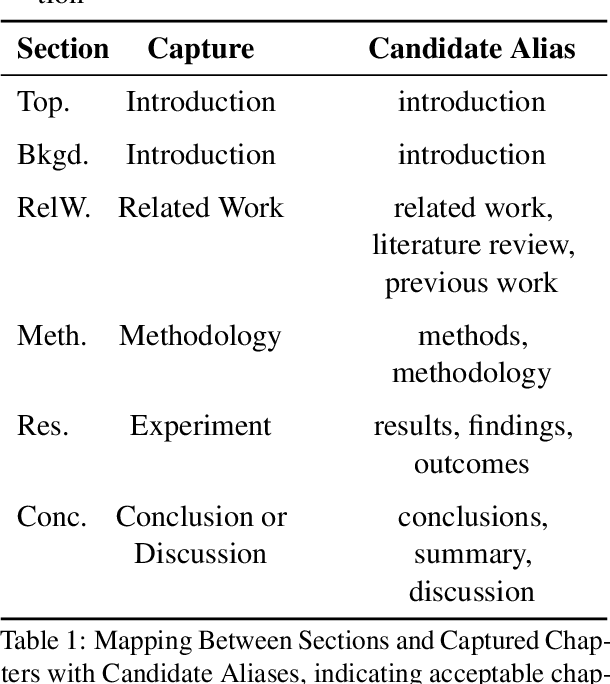
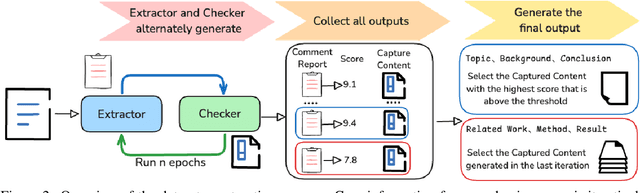
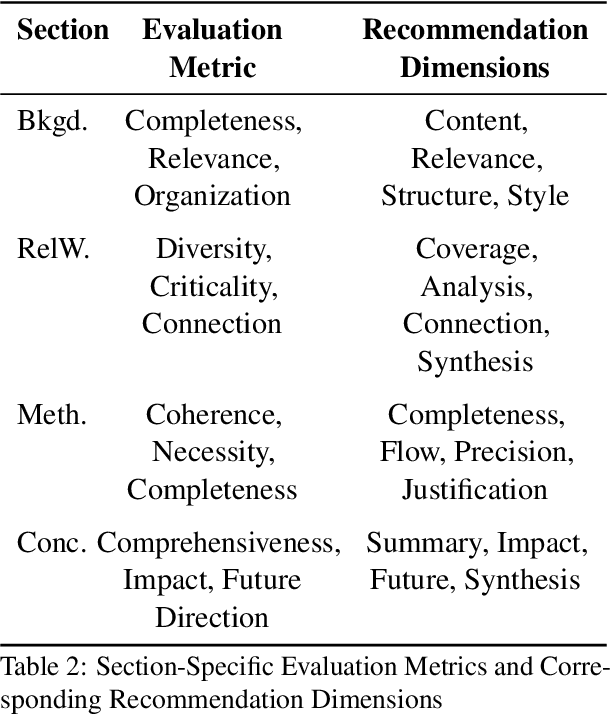
The automation of scientific research through large language models (LLMs) presents significant opportunities but faces critical challenges in knowledge synthesis and quality assurance. We introduce Feedback-Refined Agent Methodology (FRAME), a novel framework that enhances medical paper generation through iterative refinement and structured feedback. Our approach comprises three key innovations: (1) A structured dataset construction method that decomposes 4,287 medical papers into essential research components through iterative refinement; (2) A tripartite architecture integrating Generator, Evaluator, and Reflector agents that progressively improve content quality through metric-driven feedback; and (3) A comprehensive evaluation framework that combines statistical metrics with human-grounded benchmarks. Experimental results demonstrate FRAME's effectiveness, achieving significant improvements over conventional approaches across multiple models (9.91% average gain with DeepSeek V3, comparable improvements with GPT-4o Mini) and evaluation dimensions. Human evaluation confirms that FRAME-generated papers achieve quality comparable to human-authored works, with particular strength in synthesizing future research directions. The results demonstrated our work could efficiently assist medical research by building a robust foundation for automated medical research paper generation while maintaining rigorous academic standards.
Spacing and Wavelength Tunable Frequency Comb
May 05, 2025Optical frequency combs are increasingly used in applications such as optical communications, radio signal processing, and dual-comb spectroscopy. Many of these applications require a broad, flat spectrum with tunable center wavelength and tone spacing, while maintaining a consistent spectral profile. However, most existing OFC generators either lack tunability or cannot preserve their spectral shape during tuning. In this paper, we demonstrate a cavity-less OFC system based on an electro-optic comb combined with parametric spectral broadening, achieving tone spacing tunability from 25 to 32 GHz and wavelength tunability from 1548 to 1568 nm. Our OFC features high output power (greater than 2 W), broad bandwidth (greater than 90 nm), high optical signal-to-noise ratio (OSNR greater than 25 dB), and, critically, a preserved spectral profile. We show that this consistent spectral shape can be maintained by primarily adjusting the RF drive power and the gain of the optical amplifiers. We also provide a quantitative analysis of the spectral profile variations during tuning.
Global Convergence of Online Identification for Mixed Linear Regression
Nov 30, 2023Mixed linear regression (MLR) is a powerful model for characterizing nonlinear relationships by utilizing a mixture of linear regression sub-models. The identification of MLR is a fundamental problem, where most of the existing results focus on offline algorithms, rely on independent and identically distributed (i.i.d) data assumptions, and provide local convergence results only. This paper investigates the online identification and data clustering problems for two basic classes of MLRs, by introducing two corresponding new online identification algorithms based on the expectation-maximization (EM) principle. It is shown that both algorithms will converge globally without resorting to the traditional i.i.d data assumptions. The main challenge in our investigation lies in the fact that the gradient of the maximum likelihood function does not have a unique zero, and a key step in our analysis is to establish the stability of the corresponding differential equation in order to apply the celebrated Ljung's ODE method. It is also shown that the within-cluster error and the probability that the new data is categorized into the correct cluster are asymptotically the same as those in the case of known parameters. Finally, numerical simulations are provided to verify the effectiveness of our online algorithms.
Dual band wireless transmission over 75-150GHz millimeter wave carriers using frequency-locked laser pairs
Oct 27, 2023

We generate and transmit 75-GHz-bandwidth OFDM signals over the air using three mutually frequency-locked lasers, achieving minimal frequency gap between the wireless W and D bands using optical-assisted approaches, resulting in 173.5 Gb/s detected capacity.
Dynamic Partial Removal: A Neural Network Heuristic for Large Neighborhood Search
May 19, 2020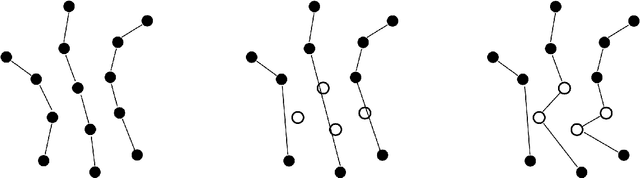
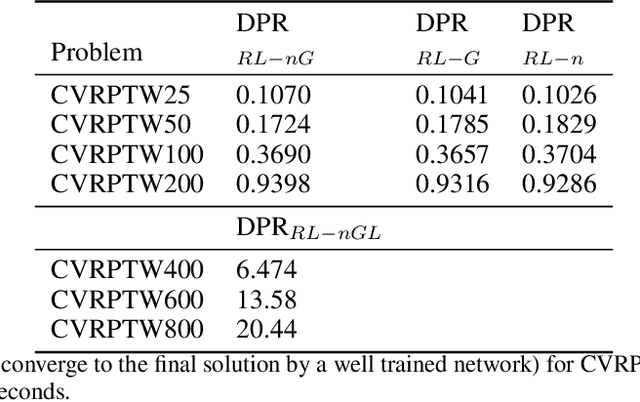
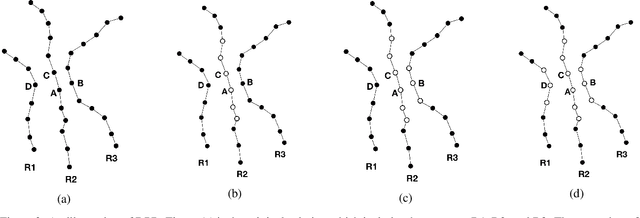
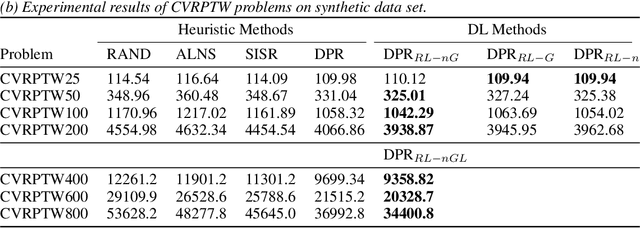
This paper presents a novel neural network design that learns the heuristic for Large Neighborhood Search (LNS). LNS consists of a destroy operator and a repair operator that specify a way to carry out the neighborhood search to solve the Combinatorial Optimization problems. The proposed approach in this paper applies a Hierarchical Recurrent Graph Convolutional Network (HRGCN) as a LNS heuristic, namely Dynamic Partial Removal, with the advantage of adaptive destruction and the potential to search across a large scale, as well as the context-awareness in both spatial and temporal perspective. This model is generalized as an efficient heuristic approach to different combinatorial optimization problems, especially to the problems with relatively tight constraints. We apply this model to vehicle routing problem (VRP) in this paper as an example. The experimental results show that this approach outperforms the traditional LNS heuristics on the same problem as well. The source code is available at \href{https://github.com/water-mirror/DPR}{https://github.com/water-mirror/DPR}.