 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNO: Unified Self-Supervised Monocular Odometry for Platform-Agnostic Deployment
Jun 08, 2025This work presents UNO, a unified monocular visual odometry framework that enables robust and adaptable pose estimation across diverse environments, platforms, and motion patterns. Unlike traditional methods that rely on deployment-specific tuning or predefined motion priors, our approach generalizes effectively across a wide range of real-world scenarios, including autonomous vehicles, aerial drones, mobile robots, and handheld devices. To this end, we introduce a Mixture-of-Experts strategy for local state estimation, with several specialized decoders that each handle a distinct class of ego-motion patterns. Moreover, we introduce a fully differentiable Gumbel-Softmax module that constructs a robust inter-frame correlation graph, selects the optimal expert decoder, and prunes erroneous estimates. These cues are then fed into a unified back-end that combines pre-trained, scale-independent depth priors with a lightweight bundling adjustment to enforce geometric consistency. We extensively evaluate our method on three major benchmark datasets: KITTI (outdoor/autonomous driving), EuRoC-MAV (indoor/aerial drones), and TUM-RGBD (indoor/handheld), demonstrating state-of-the-art performance.
ForgeryNet -- Face Forgery Analysis Challenge 2021: Methods and Results
Dec 15, 2021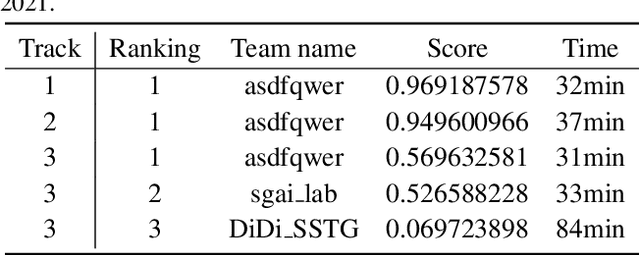
The rapid progress of photorealistic synthesis techniques has reached a critical point where the boundary between real and manipulated images starts to blur. Recently, a mega-scale deep face forgery dataset, ForgeryNet which comprised of 2.9 million images and 221,247 videos has been released. It is by far the largest publicly available in terms of data-scale, manipulations (7 image-level approaches, 8 video-level approaches), perturbations (36 independent and more mixed perturbations), and annotations (6.3 million classification labels, 2.9 million manipulated area annotations, and 221,247 temporal forgery segment labels). This paper reports methods and results in the ForgeryNet - Face Forgery Analysis Challenge 2021, which employs the ForgeryNet benchmark. The model evaluation is conducted offline on the private test set. A total of 186 participants registered for the competition, and 11 teams made valid submissions. We will analyze the top-ranked solutions and present some discussion on future work directions.