 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMREC: LLM Based Multi-Modal Recommender System
Aug 08, 2024



The importance of recommender systems is growing rapidly due to the exponential increase in the volume of content generated daily. This surge in content presents unique challenges for designing effective recommender systems. Key among these challenges is the need to effectively leverage the vast amounts of natural language data and images that represent user preferences. This paper presents a novel approach to enhancing recommender systems by leveraging Large Language Models (LLMs) and deep learning techniques. The proposed framework aims to improve the accuracy and relevance of recommendations by incorporating multi-modal information processing and by the use of unified latent space representation. The study explores the potential of LLMs to better understand and utilize natural language data in recommendation contexts, addressing the limitations of previous methods. The framework efficiently extracts and integrates text and image information through LLMs, unifying diverse modalities in a latent space to simplify the learning process for the ranking model. Experimental results demonstrate the enhanced discriminative power of the model when utilizing multi-modal information. This research contributes to the evolving field of recommender systems by showcasing the potential of LLMs and multi-modal data integration to create more personalized and contextually relevant recommendations.
Semantic Understanding and Data Imputation using Large Language Model to Accelerate Recommendation System
Jul 14, 2024



This paper aims to address the challenge of sparse and missing data in recommendation systems, a significant hurdle in the age of big data. Traditional imputation methods struggle to capture complex relationships within the data. We propose a novel approach that fine-tune Large Language Model (LLM) and use it impute missing data for recommendation systems. LLM which is trained on vast amounts of text, is able to understand complex relationship among data and intelligently fill in missing information. This enriched data is then used by the recommendation system to generate more accurate and personalized suggestions, ultimately enhancing the user experience. We evaluate our LLM-based imputation method across various tasks within the recommendation system domain, including single classification, multi-classification, and regression compared to traditional data imputation methods. By demonstrating the superiority of LLM imputation over traditional methods, we establish its potential for improving recommendation system performance.
Deep Local Trajectory Replanning and Control for Robot Navigation
May 13, 2019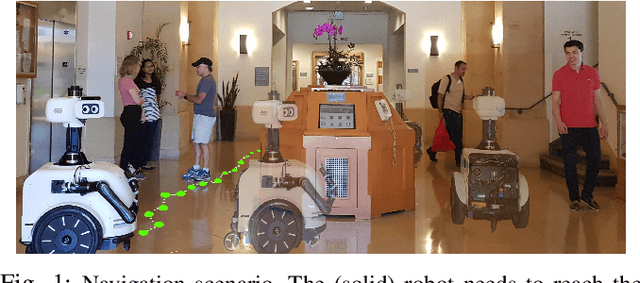
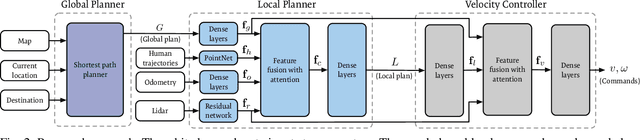
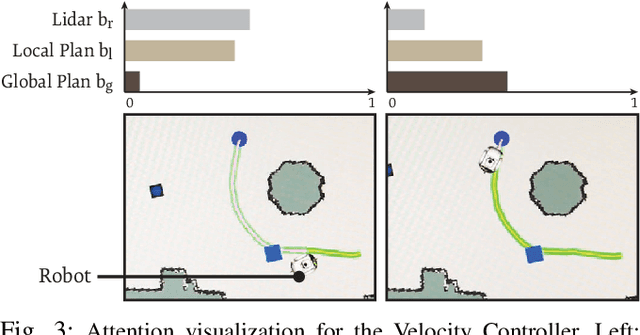
We present a navigation system that combines ideas from hierarchical planning and machine learning. The system uses a traditional global planner to compute optimal paths towards a goal, and a deep local trajectory planner and velocity controller to compute motion commands. The latter components of the system adjust the behavior of the robot through attention mechanisms such that it moves towards the goal, avoids obstacles, and respects the space of nearby pedestrians. Both the structure of the proposed deep models and the use of attention mechanisms make the system's execution interpretable. Our simulation experiments suggest that the proposed architecture outperforms baselines that try to map global plan information and sensor data directly to velocity commands. In comparison to a hand-designed traditional navigation system, the proposed approach showed more consistent performance.