 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGGD-SLAM: Monocular 3DGS SLAM Powered by Generalizable Motion Model for Dynamic Environments
Apr 14, 2026Visual SLAM algorithms achieve significant improvements through the exploration of 3D Gaussian Splatting (3DGS) representations, particularly in generating high-fidelity dense maps. However, they depend on a static environment assumption and experience significant performance degradation in dynamic environments. This paper presents GGD-SLAM, a framework that employs a generalizable motion model to address the challenges of localization and dense mapping in dynamic environments - without predefined semantic annotations or depth input. Specifically, the proposed system employs a First-In-First-Out (FIFO) queue to manage incoming frames, facilitating dynamic semantic feature extraction through a sequential attention mechanism. This is integrated with a dynamic feature enhancer to separate static and dynamic components. Additionally, to minimize dynamic distractors' impact on the static components, we devise a method to fill occluded areas via static information sampling and design a distractor-adaptive Structure Similarity Index Measure (SSIM) loss tailored for dynamic environments, significantly enhancing the system's resilience. Experiments conducted on real-world dynamic datasets demonstrate that the proposed system achieves state-of-the-art performance in camera pose estimation and dense reconstruction in dynamic scenes.
NavCrafter: Exploring 3D Scenes from a Single Image
Apr 03, 2026Creating flexible 3D scenes from a single image is vital when direct 3D data acquisition is costly or impractical. We introduce NavCrafter, a novel framework that explores 3D scenes from a single image by synthesizing novel-view video sequences with camera controllability and temporal-spatial consistency. NavCrafter leverages video diffusion models to capture rich 3D priors and adopts a geometry-aware expansion strategy to progressively extend scene coverage. To enable controllable multi-view synthesis, we introduce a multi-stage camera control mechanism that conditions diffusion models with diverse trajectories via dual-branch camera injection and attention modulation. We further propose a collision-aware camera trajectory planner and an enhanced 3D Gaussian Splatting (3DGS) pipeline with depth-aligned supervision, structural regularization and refinement. Extensive experiments demonstrate that NavCrafter achieves state-of-the-art novel-view synthesis under large viewpoint shifts and substantially improves 3D reconstruction fidelity.
Physics Informed Generative AI Enabling Labour Free Segmentation For Microscopy Analysis
Feb 02, 2026Semantic segmentation of microscopy images is a critical task for high-throughput materials characterisation, yet its automation is severely constrained by the prohibitive cost, subjectivity, and scarcity of expert-annotated data. While physics-based simulations offer a scalable alternative to manual labelling, models trained on such data historically fail to generalise due to a significant domain gap, lacking the complex textures, noise patterns, and imaging artefacts inherent to experimental data. This paper introduces a novel framework for labour-free segmentation that successfully bridges this simulation-to-reality gap. Our pipeline leverages phase-field simulations to generate an abundant source of microstructural morphologies with perfect, intrinsically-derived ground-truth masks. We then employ a Cycle-Consistent Generative Adversarial Network (CycleGAN) for unpaired image-to-image translation, transforming the clean simulations into a large-scale dataset of high-fidelity, realistic SEM images. A U-Net model, trained exclusively on this synthetic data, demonstrated remarkable generalisation when deployed on unseen experimental images, achieving a mean Boundary F1-Score of 0.90 and an Intersection over Union (IOU) of 0.88. Comprehensive validation using t-SNE feature-space projection and Shannon entropy analysis confirms that our synthetic images are statistically and featurally indistinguishable from the real data manifold. By completely decoupling model training from manual annotation, our generative framework transforms a data-scarce problem into one of data abundance, providing a robust and fully automated solution to accelerate materials discovery and analysis.
Multi-objective Generative Design of Three-Dimensional Composite Materials
Feb 26, 2023



Composite materials with 3D architectures are desirable in a variety of applications for the capability of tailoring their properties to meet multiple functional requirements. By the arrangement of materials' internal components, structure design is of great significance in tuning the properties of the composites. However, most of the composite structures are proposed by empirical designs following existing patterns. Hindered by the complexity of 3D structures, it is hard to extract customized structures with multiple desired properties from large design space. Here we report a multi-objective driven Wasserstein generative adversarial network (MDWGAN) to implement inverse designs of 3D composite structures according to given geometrical, structural and mechanical requirements. Our framework consists a GAN based network which generates 3D composite structures possessing with similar geometrical and structural features to the target dataset. Besides, multiple objectives are introduced to our framework for the control of mechanical property and isotropy of the composites. Real time calculation of the properties in training iterations is achieved by an accurate surrogate model. We constructed a small and concise dataset to illustrate our framework. With multiple objectives combined by their weight, and the 3D-GAN act as a soft constraint, our framework is proved to be capable of tuning the properties of the generated composites in multiple aspects, while keeping the selected features of different kinds of structures. The feasibility on small dataset and potential scalability on objectives of other properties make our work a novel, effective approach to provide fast, experience free composite structure designs for various functional materials.
Novel Improvement for Nonlinear Compatibility of Least Mean Square Adaptive Algorithm
Jul 23, 2022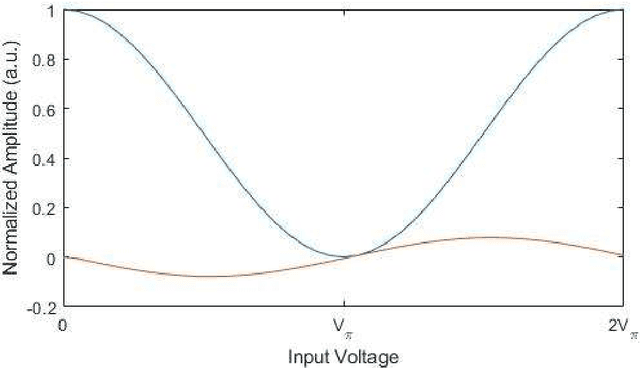
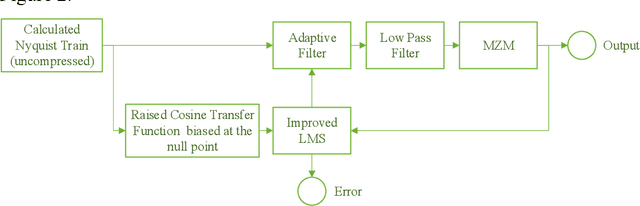
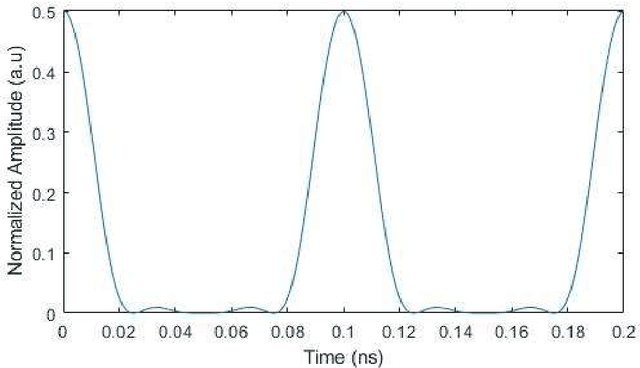
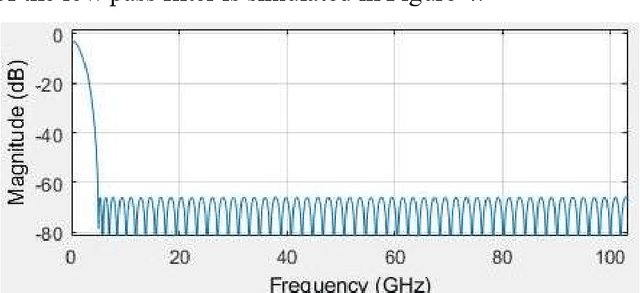
In order to improve the least mean squares (LMS) adaptation algorithm to accommodate the nonlinear transfer function, and to adjust the coefficients of adaptive filter during the actual implement of bias voltage and signal amplitude, methods are proposed and simulated to develop a nonlinear adaptive filter. The inputs to LMS are replaced by the derivatives of traditional inputs, and the step for each training iteration is adaptively controlled by the difference between target signal and actual signal. The simulation utilizes the implementation of Nyquist pulses optical sampling and works as a digital signal processing pre-compensation to reduce influence of the frequency responses on wires and devices. The simulation result shows promising improvement with the modified adaptation algorithm method in tackling Mach Zehnder modulator's non-monotonic transfer function.